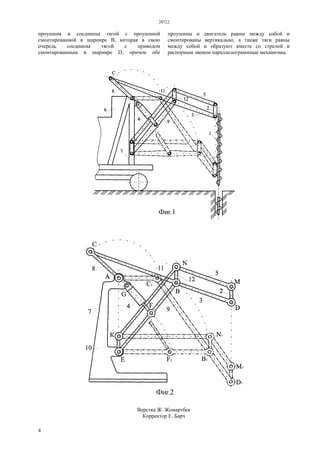
Изобретение представляет собой рабочее оборудование гидравлического экскаватора, предназначенное для бурения ям, с улучшенной конструкцией, позволяющей увеличить производительность за счет уменьшения времени выполнения работ. Основной механизм включает базовую машину, стрелу и бур, с управлением через гидроцилиндры, образуя более простой и эффективный механизм вертикального перемещения. Это достигается благодаря применению параллелограммных механизмов, что упрощает управление и повышает эффективность работы экскаватора.