2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
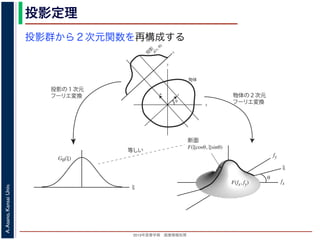
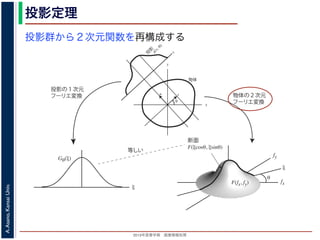
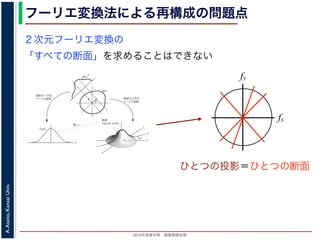
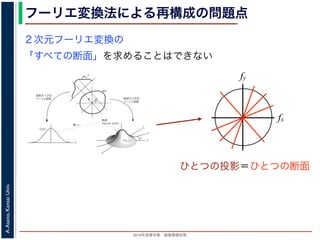
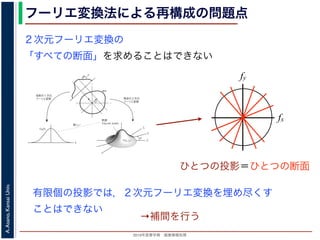
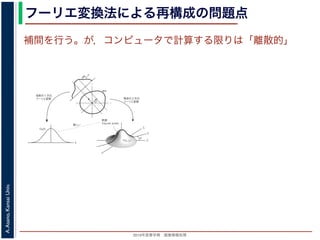
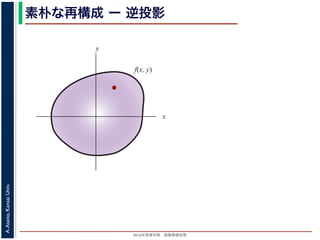
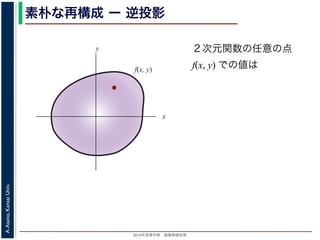
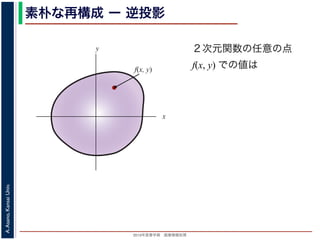
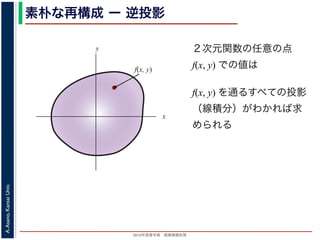
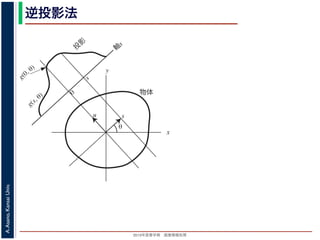
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
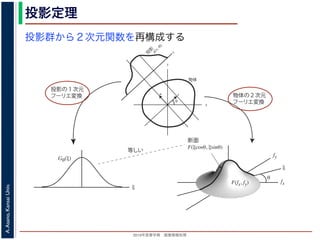
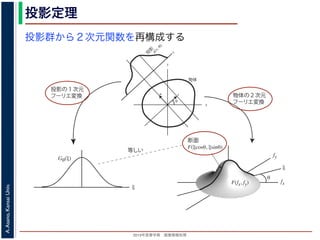
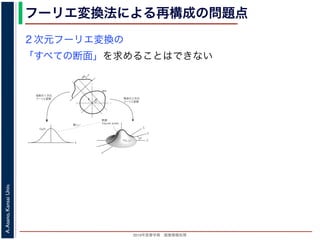
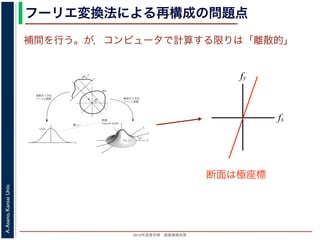
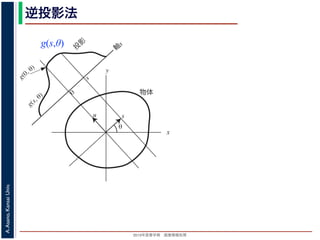
図2: Radon 変換.
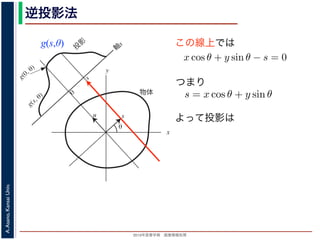
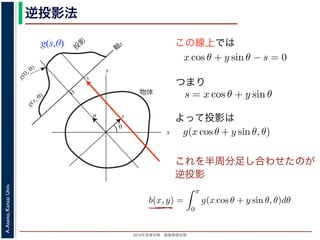
この線上では
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
39.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
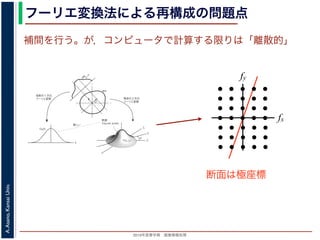
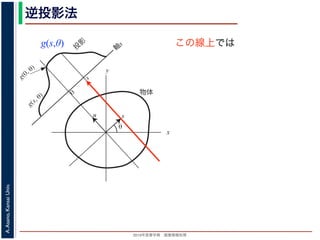
図2: Radon 変換.
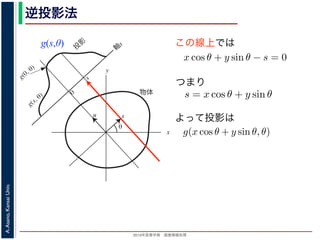
この線上では
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
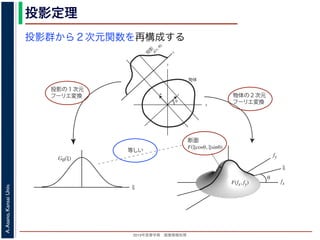
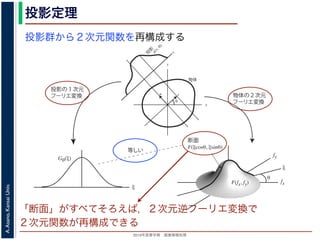
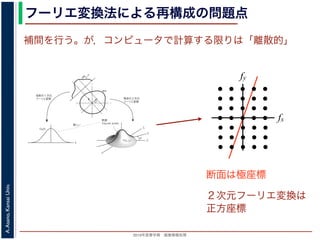
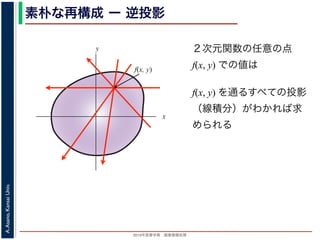
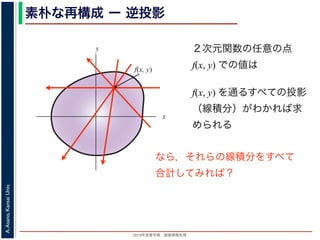
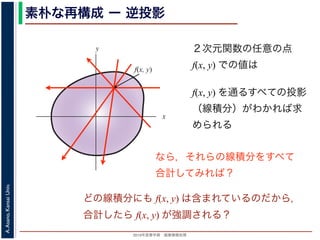
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
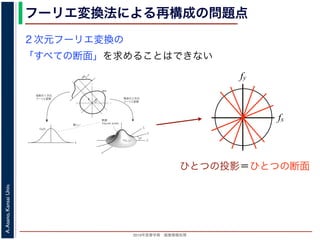
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
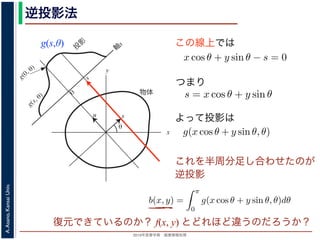
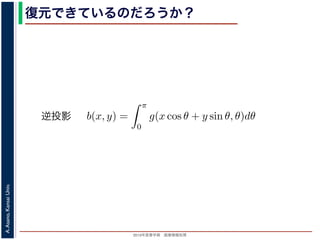
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
40.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
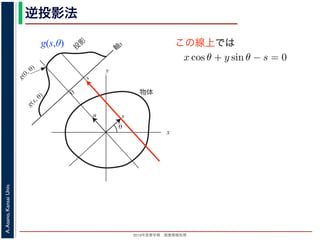
図2: Radon 変換.
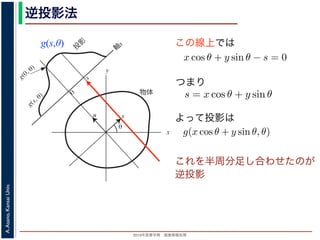
この線上では
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
41.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
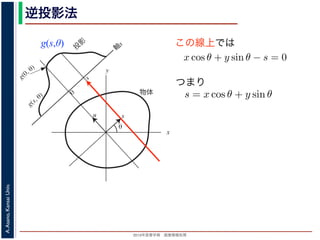
図2: Radon 変換.
この線上では
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
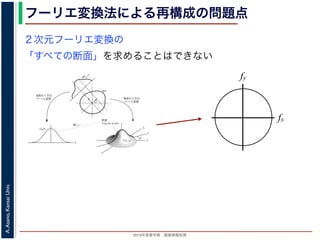
投影定理からはいったん離れて,もうすこ
(x, y) での値 f(x, y) を求めるのに,(x, y) を
とを考えます。こうすると,これらの投影は
れ,投影に含まれている他の値によるぼけは
この方法を逆投影法といいます。本当に復元
角度 θ の軸に投影された Radon 変換 g(s,
した s と x, y の関係式
s
によって,g(x cos θ + y sin θ, θ) となります。
投影法による再構成像 b(x, y) は
b(x, y) =
と表されます。Radon 変換の式 (前回の (6)
g(s, θ) =
∞
−∞
f
42.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
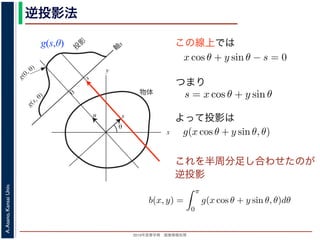
この線上では
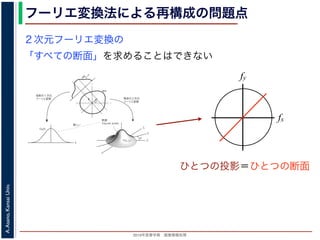
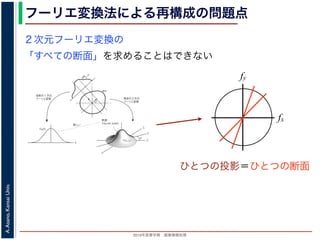
これを半周分足し合わせたのが
逆投影
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
投影定理からはいったん離れて,もうすこ
(x, y) での値 f(x, y) を求めるのに,(x, y) を
とを考えます。こうすると,これらの投影は
れ,投影に含まれている他の値によるぼけは
この方法を逆投影法といいます。本当に復元
角度 θ の軸に投影された Radon 変換 g(s,
した s と x, y の関係式
s
によって,g(x cos θ + y sin θ, θ) となります。
投影法による再構成像 b(x, y) は
b(x, y) =
と表されます。Radon 変換の式 (前回の (6)
g(s, θ) =
∞
−∞
f
43.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
これを半周分足し合わせたのが
逆投影
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
投影定理からはいったん離れて,もうすこ
(x, y) での値 f(x, y) を求めるのに,(x, y) を
とを考えます。こうすると,これらの投影は
れ,投影に含まれている他の値によるぼけは
この方法を逆投影法といいます。本当に復元
角度 θ の軸に投影された Radon 変換 g(s,
した s と x, y の関係式
s
によって,g(x cos θ + y sin θ, θ) となります。
投影法による再構成像 b(x, y) は
b(x, y) =
と表されます。Radon 変換の式 (前回の (6)
g(s, θ) =
∞
−∞
f
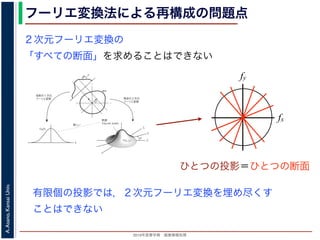
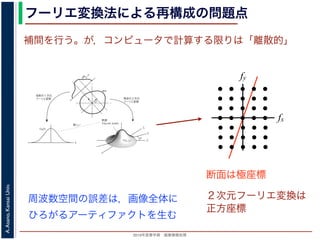
用いられた「フィルタ補正逆投影法」の考えを説明します。
逆投影法
投影定理からはいったん離れて,もうすこし素朴な再構成の方法を考えてみ
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいますか
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y) が復
この方法を逆投影法といいます。本当に復元ができるかどうか,計算してみま
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあ
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
44.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
これを半周分足し合わせたのが
逆投影
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
投影定理からはいったん離れて,もうすこ
(x, y) での値 f(x, y) を求めるのに,(x, y) を
とを考えます。こうすると,これらの投影は
れ,投影に含まれている他の値によるぼけは
この方法を逆投影法といいます。本当に復元
角度 θ の軸に投影された Radon 変換 g(s,
した s と x, y の関係式
s
によって,g(x cos θ + y sin θ, θ) となります。
投影法による再構成像 b(x, y) は
b(x, y) =
と表されます。Radon 変換の式 (前回の (6)
g(s, θ) =
∞
−∞
f
用いられた「フィルタ補正逆投影法」の考えを説明します。
逆投影法
投影定理からはいったん離れて,もうすこし素朴な再構成の方法を考えてみ
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいますか
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y) が復
この方法を逆投影法といいます。本当に復元ができるかどうか,計算してみま
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあ
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
45.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
逆投影法
g(s,θ)
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
これを半周分足し合わせたのが
逆投影
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) ht
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべて
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいま
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y)
この方法を逆投影法といいます。本当に復元ができるかどうか,計算して
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってき
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)d
つまり
よって投影は
投影定理からはいったん離れて,もうすこ
(x, y) での値 f(x, y) を求めるのに,(x, y) を
とを考えます。こうすると,これらの投影は
れ,投影に含まれている他の値によるぼけは
この方法を逆投影法といいます。本当に復元
角度 θ の軸に投影された Radon 変換 g(s,
した s と x, y の関係式
s
によって,g(x cos θ + y sin θ, θ) となります。
投影法による再構成像 b(x, y) は
b(x, y) =
と表されます。Radon 変換の式 (前回の (6)
g(s, θ) =
∞
−∞
f
用いられた「フィルタ補正逆投影法」の考えを説明します。
逆投影法
投影定理からはいったん離れて,もうすこし素朴な再構成の方法を考えてみ
(x, y) での値 f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ
とを考えます。こうすると,これらの投影はすべて f(x, y) を含んでいますか
れ,投影に含まれている他の値によるぼけは生じるものの,一応 f(x, y) が復
この方法を逆投影法といいます。本当に復元ができるかどうか,計算してみま
角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあ
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
と表されます。Radon 変換の式 (前回の (6) 式),すなわち復元できているのか? f(x, y) とどれほど違うのだろうか?
46.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
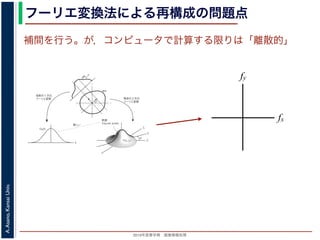
復元できているのだろうか?
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
逆投影
47.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
48.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
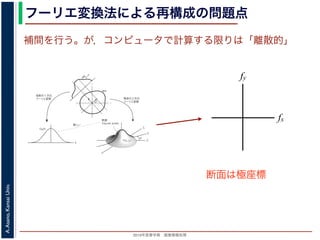
復元できているのだろうか?
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
49.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
50.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
51.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
52.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
53.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
54.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
55.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影されたRadon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
56.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
57.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
58.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
59.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
三角関数を合成
60.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
三角関数を合成
θ = π − α のときだけ0
61.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
g(s, θ) =
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/
三角関数を合成
θ = π − α のときだけ0
62.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
63.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
64.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5
65.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5
66.
2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
積分すると1
−∞
1) 式を (2)式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5





![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-47-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-48-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-49-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-50-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-51-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-52-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-53-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-54-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?角度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通って
した s と x, y の関係式
s = x cos θ + y sin θ
によって,g(x cos θ + y sin θ, θ) となります。これをすべての θ につい
投影法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)d
と表されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ −
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x co
=
∞
f(x , y )
π
δ((x − x) cos θ + (y − y)
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式に代入すると
y) =
π ∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx
成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
don 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
代入すると
=
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
で,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
Radon変換
逆投影
方法を逆投影法といいます。本当に復元ができるかどうか,計算してみましょう。
度 θ の軸に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前回の (8) 式
s と x, y の関係式
s = x cos θ + y sin θ
って,g(x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせるわけですか
法による再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
されます。Radon 変換の式 (前回の (6) 式),すなわち
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
ります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-55-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-56-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-57-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-58-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
三角関数を合成](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-59-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
三角関数を合成
θ = π − α のときだけ0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-60-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているのだろうか?
h(θ)が有限個のθkでしか0にならないとき
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 になら
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数につ
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。した
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 co
を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
す。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
つことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関数
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5 ペー
g(s, θ) =
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
と (1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
となります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
がなりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
で,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/
三角関数を合成
θ = π − α のときだけ0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-61-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-62-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-63-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-64-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-65-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
積分すると1
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-66-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
積分すると1
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
) 式は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
。∗ は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法によ
(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5
よって](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-67-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元できているといえなくもないが…
積分すると1
−∞
1) 式を (2) 式に代入すると
b(x, y) =
π
0
∞
−∞
f(x , y )δ(x cos θ + y sin θ − (x cos θ + y sin θ))dx dy dθ
=
∞
−∞
f(x , y )
π
0
δ((x − x) cos θ + (y − y) sin θ))dθ dx dy
なります。ここで,関数 h(θ) が有限個の θ = θk についてしか 0 にならないとき
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ) = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
) 式は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
。∗ は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法によ
(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります
δ[h(θ)] =
k
1
|h (θk)|
δ[θ − θk]
なりたつことを用います(証明は略)。(4) 式のデルタ関数の引数について
(x − x) cos θ + (y − y) sin θ = (x − x)2 + (y − y)2 sin(θ + α),
α = cos−1 y −y√
(x −x)2+(y −y)2
= sin−1 x −x√
(x −x)2+(y −y)2
,0 θ < π でこの値が 0 になるのは θ = π − α のときだけです。したがって,(4) 式のデルタ関
δ((x − x) cos θ + (y − y) sin θ)) =
1
(x − x)2 + (y − y)2 cos(π)
δ(θ − (π − α))
野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 1/5
よって
コンヴォリューションに
なっている](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-68-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元するにはは
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
は,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
1 1](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-69-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元するには
フーリエ変換すると,コンヴォリューション→積
は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
は,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
1 1](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-70-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元するには
フーリエ変換すると,コンヴォリューション→積
は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
は,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
1 1
= f(x, y) ∗
x2 + y2
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
(9)
FT
1
x2 + y2
=
1
f2
x + f2
y
(10)
ると(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-71-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元するには
フーリエ変換すると,コンヴォリューション→積
は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
は,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
1 1
= f(x, y) ∗
x2 + y2
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
(9)
FT
1
x2 + y2
=
1
f2
x + f2
y
(10)
ると(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
= f(x, y) ∗
1
x2 + y2
となります。∗ は,第1部で出てきたコンヴォリューションの記号です。したがって,逆
再構成像 b(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像に
このままでは,得られた像は大きくぼやけているので,まだ再構成像が得られたとはい
かし,(8) 式をフーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ
エ変換のかけ算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
となります。
FT
1
x2 + y2
=
1
f2
x + f2
y
であることを用いると(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)]
なので](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-72-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
復元するには
フーリエ変換すると,コンヴォリューション→積
は
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
は,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
は,第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法に
は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になりま
,得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません
フーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フ
」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
1 1
= f(x, y) ∗
x2 + y2
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
得られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
(9)
FT
1
x2 + y2
=
1
f2
x + f2
y
(10)
ると(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
エ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
(9)
FT
1
x2 + y2
=
1
f2
x + f2
y
(10)
と(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
との物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
= f(x, y) ∗
1
x2 + y2
となります。∗ は,第1部で出てきたコンヴォリューションの記号です。したがって,逆
再構成像 b(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像に
このままでは,得られた像は大きくぼやけているので,まだ再構成像が得られたとはい
かし,(8) 式をフーリエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ
エ変換のかけ算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
となります。
FT
1
x2 + y2
=
1
f2
x + f2
y
であることを用いると(証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)]
なので](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-73-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-74-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-75-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
周波数0の成分](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-76-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-77-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-78-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-79-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-80-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-81-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-82-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-83-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-84-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-85-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0
値は正のはず](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-86-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0
値は正のはず
そもそも](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-87-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
(8)
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
(9)
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0
値は正のはず
そもそも](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-88-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
(8)
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
(9)
= f(x, y) ∗
1
x2 + y2
となります。∗ は,第1部で出てきたコンヴォリューションの記号です。し
再構成像 b(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳し
このままでは,得られた像は大きくぼやけているので,まだ再構成像が得
かし,(8) 式をフーリエ変換すると, 第1部で説明した「コンヴォリューショ
エ変換のかけ算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
となります。
FT
1
x2 + y2
=
1
f2
x + f2
y
であることを用いると(証明は略),(9) 式は
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0
値は正のはず
そもそも](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-89-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
これでいいのでしょうか?
つまりf(x, y)は
fx + fy
証明は略),(9) 式は
FT[f(x, y)] = f2
x + f2
y × FT[b(x, y)] (11)
物体 f(x, y) のフーリエ変換を復元できます。この方法を逆フィルタリング
,このような方法でコンヴォリューションの逆演算を行うことをデコンヴォ
tion) といいます。
題点があります。そのひとつは,逆投影 b(x, y) は物体 f(x, y) がぼけて広がっ
FT[b(x, y)] を物体 f(x, y) の存在する範囲よりもずっと大きくとって計算しな
。
は吸収率の分布ですから,すべての (x, y) において正の値であるはずなのに,
のとき FT[f(x, y)] = 0 となることです。つまり,フーリエ変換の周波数 0 の
均が 0 なのに,f(x, y) がすべて正の値というのはありえないはずです。これ
T[b(x, y)] は発散してしまっていて,そもそも情報が得られていないことに原
b(x, y) =
∞
−∞
f(x , y )
1
(x − x)2 + (y − y)2
dx dy
= f(x, y) ∗
1
x2 + y2
(8)
第1部で出てきたコンヴォリューションの記号です。したがって,逆投影法による
もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳してぼかした像になります。
られた像は大きくぼやけているので,まだ再構成像が得られたとはいえません。し
リエ変換すると, 第1部で説明した「コンヴォリューションのフーリエ変換=フーリ
関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
(9)
= f(x, y) ∗
1
x2 + y2
となります。∗ は,第1部で出てきたコンヴォリューションの記号です。し
再構成像 b(x, y) は,もとの物体 f(x, y) の各点に関数 1/ x2 + y2 を重畳し
このままでは,得られた像は大きくぼやけているので,まだ再構成像が得
かし,(8) 式をフーリエ変換すると, 第1部で説明した「コンヴォリューショ
エ変換のかけ算」の関係があるので
FT[b(x, y)] = FT[f(x, y)] × FT
1
x2 + y2
∴ FT[f(x, y)] = FT[b(x, y)]/FT
1
x2 + y2
となります。
FT
1
x2 + y2
=
1
f2
x + f2
y
であることを用いると(証明は略),(9) 式は
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
は,fx = fy = 0 のとき FT[b(x, y)] は発散してし
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきません
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7
た形になっているため,FT[b(x, y)] を物体 f(x, y) の存在する範囲
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから,すべての (x, y
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0 となることです。
値,すなわち f(x, y) の平均が 0 なのに,f(x, y) がすべて正の値と
は,fx = fy = 0 のとき FT[b(x, y)] は発散してしまっていて,そも
因があります。
フィルタ補正逆投影法
前節のように逆投影法は実はうまくいきませんが,投影定理を用
かも実用的な再構成法を導くことができます。
浅野 晃/画像情報処理(2013 年度春学期) 第14回 (2013. 7. 10)
周波数0の成分
0
こうなっている
ことになる
おかしい。画像なんだから
0
値は正のはず
そもそも
∴ FT[f(x, y)] = FT
となります。
FT
1
x2 +
であることを用いると(証明は略),(9) 式は
FT[f(x, y)] =
となり,(11) 式でもとの物体 f(x, y) のフーリエ
(inverse filtering) といい,このような方法でコ
リューション (deconvolution) といいます。
この方法には,2 つの問題点があります。そのひ
た形になっているため,FT[b(x, y)] を物体 f(x,
ければならないことです。
もうひとつは,f(x, y) は吸収率の分布ですから
(11) 式から fx = fy = 0 のとき FT[f(x, y)] = 0
値,すなわち f(x, y) の平均が 0 なのに,f(x, y)
で発散している](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-90-320.jpg)
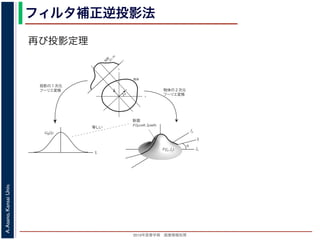
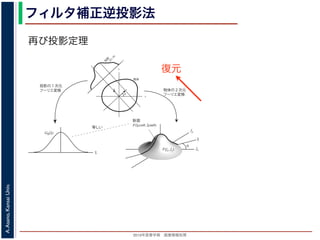
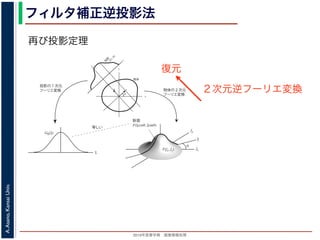
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
再び投影定理
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s, θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
F(fx, fy)
ξ
Gθ(ξ)
図 1: 投影定理.
)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ
ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
す。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に
復元
2次元逆フーリエ変換](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-94-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-97-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-98-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-99-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-100-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-101-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし
投影定理より](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-102-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし
T[f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
が f(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
表されます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ)
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
なります。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
いう関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
投影定理より](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-103-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
極座標に変換
前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 G
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
りますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξd
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリエ変
(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
れます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ) に変
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
ます。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ(ξ) と
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
れます。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) とし
T[f(x, y)] を前回にならって F(fx, fy) と書くことにしましょう。F(fx, fy) を逆フーリ
が f(x, y) ですから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
表されます。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ, θ)
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
なります。投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換 Gθ
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
いう関係がありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
すから,
f(x, y) =
∞
−∞
F(fx, fy) exp(i2π(fxx + fyy))dfxdfy
。これを,図 1 の右下のように fx = ξ cos θ, fy = ξ sin θ として極座標 (ξ
f(x, y) =
2π
0
∞
0
F(ξ cos θ, ξ sin θ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
投影定理により,Radon 変換 g(s, θ) の s についての 1 次元フーリエ変換
Gθ(ξ) = F(ξ cos θ, ξ sin θ)
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0
投影定理より](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-104-320.jpg)
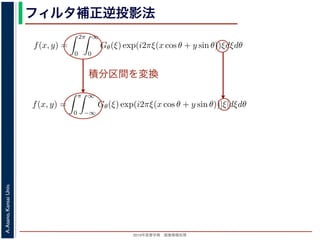
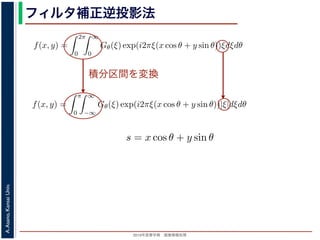
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
積分区間を変換
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (14
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (15
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,積
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (16
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (1
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (1
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (1
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
らはいったん離れて,もうすこし素朴な再構成の方法を考えてみましょ
f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ につい
。こうすると,これらの投影はすべて f(x, y) を含んでいますから,f(x
まれている他の値によるぼけは生じるものの,一応 f(x, y) が復元される
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-111-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
積分区間を変換
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (14
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (15
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,積
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (16
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (1
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (1
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (1
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
らはいったん離れて,もうすこし素朴な再構成の方法を考えてみましょ
f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ につい
。こうすると,これらの投影はすべて f(x, y) を含んでいますから,f(x
まれている他の値によるぼけは生じるものの,一応 f(x, y) が復元される
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-112-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
積分区間を変換
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (14
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (15
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,積
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (16
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (1
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (1
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (1
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
らはいったん離れて,もうすこし素朴な再構成の方法を考えてみましょ
f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ につい
。こうすると,これらの投影はすべて f(x, y) を含んでいますから,f(x
まれている他の値によるぼけは生じるものの,一応 f(x, y) が復元される
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-113-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
積分区間を変換
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (14
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (15
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,積
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (16
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (1
ありますから,
f(x, y) =
2π
0
∞
0
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))ξdξdθ (1
。ここで,ξ の積分区間を (−∞, ∞) とし,そのかわりに θ の積分区間 (0, π) としても,
同じですから
f(x, y) =
π
0
∞
−∞
Gθ(ξ) exp(i2πξ(x cos θ + y sin θ))|ξ|dξdθ (1
報処理(2013 年度春学期) 第14回 (2013. 7. 10) http://racco.mikeneko.jp/ 3/5 ペー
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
らはいったん離れて,もうすこし素朴な再構成の方法を考えてみましょ
f(x, y) を求めるのに,(x, y) を通って写された投影をすべての θ につい
。こうすると,これらの投影はすべて f(x, y) を含んでいますから,f(x
まれている他の値によるぼけは生じるものの,一応 f(x, y) が復元される
投影法といいます。本当に復元ができるかどうか,計算してみましょう
に投影された Radon 変換 g(s, θ) のうち,(x, y) を通ってきた部分は,前
の関係式
s = x cos θ + y sin θ
x cos θ + y sin θ, θ) となります。これをすべての θ について足しあわせる
再構成像 b(x, y) は
b(x, y) =
π
0
g(x cos θ + y sin θ, θ)dθ
。Radon 変換の式 (前回の (6) 式),すなわち
の逆フーリエ変換
s と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-114-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19)
逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
タを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
ィルタ補正逆投影法 (filter back projection method) といいます。前節の「デコン
ともなう逆投影法」では逆投影をしてから補正をしていますが,この方法では補正
ています。
影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューションをともな
の逆フーリエ変換
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数
るフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られること
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前節
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この方
ら逆投影しています。](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-115-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19)
逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
タを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
ィルタ補正逆投影法 (filter back projection method) といいます。前節の「デコン
ともなう逆投影法」では逆投影をしてから補正をしていますが,この方法では補正
ています。
影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューションをともな
の逆フーリエ変換
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数
るフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られること
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前節
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この方
ら逆投影しています。
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波
するフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られるこ
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-116-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19)
逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
タを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
ィルタ補正逆投影法 (filter back projection method) といいます。前節の「デコン
ともなう逆投影法」では逆投影をしてから補正をしていますが,この方法では補正
ています。
影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューションをともな
の逆フーリエ変換
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数
るフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られること
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前節
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この方
ら逆投影しています。
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波
するフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られるこ
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この
とおくと,](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-117-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19)
逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
タを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
ィルタ補正逆投影法 (filter back projection method) といいます。前節の「デコン
ともなう逆投影法」では逆投影をしてから補正をしていますが,この方法では補正
ています。
影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューションをともな
の逆フーリエ変換
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数
るフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られること
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前節
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この方
ら逆投影しています。
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波
するフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られるこ
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この
式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17
内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19
影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
タ補正逆投影法 (filter back projection method) といいます。前節の「デコン
とおくと,](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-118-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
フィルタ補正逆投影法
関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17)
の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18)
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19)
逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
タを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
ィルタ補正逆投影法 (filter back projection method) といいます。前節の「デコン
ともなう逆投影法」では逆投影をしてから補正をしていますが,この方法では補正
ています。
影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューションをともな
の逆フーリエ変換
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数
るフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られること
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前節
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この方
ら逆投影しています。
と x, y の関係式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ
す。この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
,(17) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
す。
,(2) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波
するフィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られるこ
の方法をフィルタ補正逆投影法 (filter back projection method) といいます。前
ーションをともなう逆投影法」では逆投影をしてから補正をしていますが,この
式((1) 式)を使うと
f(x, y) =
π
0
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ dθ (17
内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ (18
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ (19
影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空間におい
適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを表してい
タ補正逆投影法 (filter back projection method) といいます。前節の「デコン
とおくと,
投影を,
「周波数空間で |ξ| 倍するフィルタ」を
適用してから,逆投影](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-119-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-120-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-121-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補
ある角度 θ での投影を
周波数空間で |ξ| 倍](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-122-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補
ある角度 θ での投影を
周波数空間で |ξ| 倍 実空間では
いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への
ーリエ変換法と違って実空間で補間を行うので,実空間で画面全体にわた
ことはありません。また,フィルタによる補正は各 θ で独立に行えるの
の投影の撮影を待たずに行えます。
式の計算は Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ
いるだけですから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
ションで表され,フーリエ変換を行う必要はなくなります。この方法はコ
onvolution back projection method) とよばれています。
とのコンヴォリューション](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-123-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補
よって広がった物体像の逆フーリエ変換を扱う必要はありません。ま
エ変換法と同様に,極座標上の点から直交座標上の格子点への補間の操
法と違って実空間で補間を行うので,実空間で画面全体にわたるアーテ
ません。また,フィルタによる補正は各 θ で独立に行えるので,ある
影を待たずに行えます。
Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ| をかけて
すから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
れ,フーリエ変換を行う必要はなくなります。この方法はコンヴォリュ
back projection method) とよばれています。
ある角度 θ での投影を
周波数空間で |ξ| 倍 実空間では
いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への
ーリエ変換法と違って実空間で補間を行うので,実空間で画面全体にわた
ことはありません。また,フィルタによる補正は各 θ で独立に行えるの
の投影の撮影を待たずに行えます。
式の計算は Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ
いるだけですから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
ションで表され,フーリエ変換を行う必要はなくなります。この方法はコ
onvolution back projection method) とよばれています。
とのコンヴォリューション](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-124-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補
よって広がった物体像の逆フーリエ変換を扱う必要はありません。ま
エ変換法と同様に,極座標上の点から直交座標上の格子点への補間の操
法と違って実空間で補間を行うので,実空間で画面全体にわたるアーテ
ません。また,フィルタによる補正は各 θ で独立に行えるので,ある
影を待たずに行えます。
Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ| をかけて
すから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
れ,フーリエ変換を行う必要はなくなります。この方法はコンヴォリュ
back projection method) とよばれています。
ある角度 θ での投影を
周波数空間で |ξ| 倍 実空間では
いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への
ーリエ変換法と違って実空間で補間を行うので,実空間で画面全体にわた
ことはありません。また,フィルタによる補正は各 θ で独立に行えるの
の投影の撮影を待たずに行えます。
式の計算は Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ
いるだけですから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
ションで表され,フーリエ変換を行う必要はなくなります。この方法はコ
onvolution back projection method) とよばれています。
とのコンヴォリューション
最初からこれを定義しておけば
フーリエ変換の必要はない](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-125-320.jpg)
![2013年度春学期 画像情報処理
A.Asano,KansaiUniv.
コンヴォリューション逆投影法
0 −∞
この式の [ ] 内は,関数 |ξ|Gθ(ξ) の逆フーリエ変換になっています。そこで,
ˆg(s, θ) ≡ ˆg(x cos θ + y sin θ, θ) ≡
∞
−∞
|ξ|Gθ(ξ) exp(i2πsξ)dξ
7) 式は
f(x, y) =
π
0
ˆg(x cos θ + y sin θ, θ)dθ
) 式の逆投影と同じ形です。つまり (19) 式は,「各 θ について,投影を周波数空
フィルタを適用しておいてから,逆投影」すれば物体 f(x,y) が得られることを
法をフィルタ補正逆投影法 (filter back projection method) といいます。前節の
ョンをともなう逆投影法」では逆投影をしてから補正をしていますが,この方法
投影しています。
は,投影に関してのみフーリエ変換を扱えばよいので,デコンヴォリューション
ように,ぼけによって広がった物体像の逆フーリエ変換を扱う必要はありませ
接用いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への補
よって広がった物体像の逆フーリエ変換を扱う必要はありません。ま
エ変換法と同様に,極座標上の点から直交座標上の格子点への補間の操
法と違って実空間で補間を行うので,実空間で画面全体にわたるアーテ
ません。また,フィルタによる補正は各 θ で独立に行えるので,ある
影を待たずに行えます。
Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ| をかけて
すから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
れ,フーリエ変換を行う必要はなくなります。この方法はコンヴォリュ
back projection method) とよばれています。
ある角度 θ での投影を
周波数空間で |ξ| 倍 実空間では
いるフーリエ変換法と同様に,極座標上の点から直交座標上の格子点への
ーリエ変換法と違って実空間で補間を行うので,実空間で画面全体にわた
ことはありません。また,フィルタによる補正は各 θ で独立に行えるの
の投影の撮影を待たずに行えます。
式の計算は Radon 変換 g(s, θ)) のフーリエ変換 Gθ(ξ) にフィルタ関数 |ξ
いるだけですから,フィルタ関数を実空間で表した FT−1[|ξ|] を用いると
ˆg(s, θ) = g(s, θ) ∗ FT−1
[|ξ|]
ションで表され,フーリエ変換を行う必要はなくなります。この方法はコ
onvolution back projection method) とよばれています。
とのコンヴォリューション
最初からこれを定義しておけば
フーリエ変換の必要はない
極座標→直交座標の変換は実空間で行うので,
誤差が画面全体に拡散することはない](https://image.slidesharecdn.com/2013sippr14ss-130722173055-phpapp02/85/2013-CT-126-320.jpg)