2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
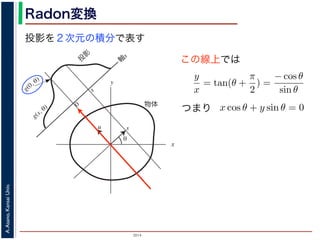
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
28.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
つまり
29.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
30.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
この線上だけを積分する
31.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
この線上だけを積分する
→この式を満たす点だけを
積分する
32.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
この線上だけを積分する
→この式を満たす点だけを
積分する
図 1: CT スキャナにおける透視像の撮影.(a) 平行照射.(b) フ
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示すために
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関数 g(s, θ
は,法線ベクトルが θ 方向であるような直線に沿って積分することで得られ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線に沿っ
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) はデルタ関
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ)dxdy
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から s だけ離
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,(2) 式
33.
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
この線上だけを積分する
→この式を満たす点だけを
積分する
図 1: CT スキャナにおける透視像の撮影.(a) 平行照射.(b) フ
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示すために
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関数 g(s, θ
は,法線ベクトルが θ 方向であるような直線に沿って積分することで得られ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線に沿っ
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) はデルタ関
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ)dxdy
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から s だけ離
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,(2) 式
デルタ関数で表せる
2014
A.Asano,KansaiUniv.
Radon変換
投影を2次元の積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関
は,法線ベクトルが θ 方向であるような直線に沿って積分することで
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) は
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが
は,法線ベクトルが θ 方向であるような直線に沿って積分するこ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y s
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものです
(x − s cos θ) cos θ + (y − s sin θ) sin
つまり
この線上だけを積分する
→この式を満たす点だけを
積分する
図 1: CT スキャナにおける透視像の撮影.(a) 平行照射.(b) フ
2 次元の物体と投影との関係を示すのが Radon 変換です。これを示すために
考えてください。θ 方向の軸 s 上に物体 f(x, y) を投影したものが関数 g(s, θ
は,法線ベクトルが θ 方向であるような直線に沿って積分することで得られ
標の原点を通る直線上を積分して得られた値を g(0, θ) とします。
法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線上の点は
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線に沿っ
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) はデルタ関
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ)dxdy
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から s だけ離
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,(2) 式
デルタ関数で表せる
2014
A.Asano,KansaiUniv.
Radon変換
g(s,θ)は?
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
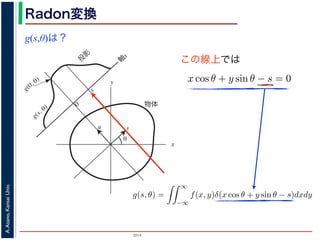
図2: Radon 変換.
この線上では
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3)
40.
2014
A.Asano,KansaiUniv.
Radon変換
g(s,θ)は?
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3)
41.
2014
A.Asano,KansaiUniv.
Radon変換
g(s,θ)は?
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3)
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線に沿って
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) はデルタ関数
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ)dxdy
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から s だけ離
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,(2) 式か
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon 変換とよ
42.
2014
A.Asano,KansaiUniv.
Radon変換
g(s,θ)は?
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
Radon変換
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから
(x − s cos θ) cos θ + (y − s sin θ) sin θ =
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3)
y
x
= tan(θ +
π
2
) =
− cos θ
sin θ
を満たしますから,
x cos θ + y sin θ = 0
が得られます。「法線ベクトルが θ 方向で,(x, y) 座標の原点を通る直線に沿って
のうち (2) 式を満たす点の値だけを積分することですから,g(0, θ) はデルタ関数
g(0, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ)dxdy
と表すことができます。同様に,「法線ベクトルが θ 方向で,原点から s だけ離
る直線を x 方向に s cos θ ,y 方向に s sin θ だけ移動したものですから,(2) 式か
(x − s cos θ) cos θ + (y − s sin θ) sin θ = 0
すなわち
x cos θ + y sin θ − s = 0
を満たします。したがって (3) 式と同様に
g(s, θ) =
∞
−∞
f(x, y)δ(x cos θ + y sin θ − s)dxdy
が得られます。(6) 式を,2 次元分布 f(x, y) から投影 g(s, θ) への Radon 変換とよ
2014
A.Asano,KansaiUniv.
ray-sum
投影を1次元の線積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
(x, y)と(s, u)の関係は θ の回転
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
46.
2014
A.Asano,KansaiUniv.
ray-sum
投影を1次元の線積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
(x, y)と(s, u)の関係は θ の回転
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
(x, y)を(s, u)で表す
47.
2014
A.Asano,KansaiUniv.
ray-sum
投影を1次元の線積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
(x, y)と(s, u)の関係は θ の回転
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクトルが θ
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関係を満た
f(x, y) の積分,すなわち
g(s, θ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)du
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) http://racc
(x, y)を(s, u)で表す
48.
2014
A.Asano,KansaiUniv.
ray-sum
投影を1次元の線積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
sが一定で uが変化
(x, y)と(s, u)の関係は θ の回転
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクトルが θ
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関係を満た
f(x, y) の積分,すなわち
g(s, θ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)du
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) http://racc
(x, y)を(s, u)で表す
49.
2014
A.Asano,KansaiUniv.
ray-sum
投影を1次元の線積分で表す
x
y
θ
s
軸
s
g(s, θ)
u
物体
投
影
0
g(0, θ)
s
図2: Radon 変換.
この線上では
sが一定で uが変化
ray-sum
(x, y)と(s, u)の関係は θ の回転
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクトルが θ
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関係を満た
f(x, y) の積分,すなわち
g(s, θ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)du
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) http://racc
(x, y)を(s, u)で表す
2014
A.Asano,KansaiUniv.
投影定理の証明
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
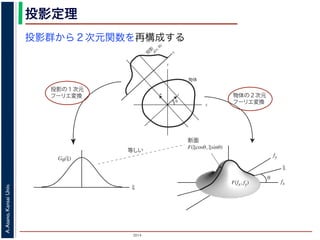
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
f(x, y)
。この問題を解く重要な鍵が,次に述べる投影定理 (projection theorem) です。
) の s についての 1 次元フーリエ変換 Gθ(ξ) と,
次元フーリエ変換 F(fx, fy) の原点を通り fx, fy 面に垂直で fx 軸に対して
面による断面は
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (15)
のです。この定理は,以下のように証明されます。
の s についての 1 次元フーリエ変換 Gθ(ξ) は
Gθ(ξ) =
∞
−∞
g(s, θ) exp(−i2πξs)ds (16)
ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
57.
2014
A.Asano,KansaiUniv.
投影定理の証明
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
f(x, y)
。この問題を解く重要な鍵が,次に述べる投影定理 (projection theorem) です。
) の s についての 1 次元フーリエ変換 Gθ(ξ) と,
次元フーリエ変換 F(fx, fy) の原点を通り fx, fy 面に垂直で fx 軸に対して
面による断面は
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (15)
のです。この定理は,以下のように証明されます。
の s についての 1 次元フーリエ変換 Gθ(ξ) は
Gθ(ξ) =
∞
−∞
g(s, θ) exp(−i2πξs)ds (16)
ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
58.
2014
A.Asano,KansaiUniv.
投影定理の証明
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
f(x, y)
。この問題を解く重要な鍵が,次に述べる投影定理 (projection theorem) です。
) の s についての 1 次元フーリエ変換 Gθ(ξ) と,
次元フーリエ変換 F(fx, fy) の原点を通り fx, fy 面に垂直で fx 軸に対して
面による断面は
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (15)
のです。この定理は,以下のように証明されます。
の s についての 1 次元フーリエ変換 Gθ(ξ) は
Gθ(ξ) =
∞
−∞
g(s, θ) exp(−i2πξs)ds (16)
ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
ray-sum
59.
2014
A.Asano,KansaiUniv.
投影定理の証明
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
f(x, y)
。この問題を解く重要な鍵が,次に述べる投影定理 (projection theorem) です。
) の s についての 1 次元フーリエ変換 Gθ(ξ) と,
次元フーリエ変換 F(fx, fy) の原点を通り fx, fy 面に垂直で fx 軸に対して
面による断面は
Gθ(ξ) = F(ξ cos θ, ξ sin θ) (15)
のです。この定理は,以下のように証明されます。
の s についての 1 次元フーリエ変換 Gθ(ξ) は
Gθ(ξ) =
∞
−∞
g(s, θ) exp(−i2πξs)ds (16)
ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクトルが θ 方向」
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関係を満たして
f(x, y) の積分,すなわち
g(s, θ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)du
浅野 晃/画像情報処理(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mike
ray-sum
60.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
61.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
62.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
63.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin
= F(ξ cos θ, ξ sin θ)
となります。
64.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin
= F(ξ cos θ, ξ sin θ)
となります。
fxF(fx, fy)
y
θ
ξ
ξ
Gθ(ξ)
図 3: 投影定理.
す。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
sdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18
65.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin
= F(ξ cos θ, ξ sin θ)
となります。
fxF(fx, fy)
y
θ
ξ
ξ
Gθ(ξ)
図 3: 投影定理.
す。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
sdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18
66.
2014
A.Asano,KansaiUniv.
投影定理の証明
Gθ(ξ) =
−∞
g(s, θ)exp(−i2πξs)ds (16)
れに ray-sum の定義である (11) 式を代入すると
Gθ(ξ) =
∞
−∞
f(s cos θ − u sin θ, s sin θ + u cos θ)
× exp(−i2πξs)dsdu (17)
(2013 年度春学期) 第13回 (2013. 7. 3) http://racco.mikeneko.jp/ 4/6 ページ
(x, y)と(s, u)の関係
図 2: Radon 変換.
Ray-sum
Radon 変換は投影を x, y 平面での積分で表していますが,投影は本来
変数の積分で表されるほうが自然です。そこで,(6) 式を1変数の積分
図 2 で投影方向に沿った (s, u) 座標は,(x, y) 座標を θ だけ回転した
s
u
=
cos θ sin θ
− sin θ cos θ
x
y
x
y
=
cos θ − sin θ
sin θ cos θ
s
u
と表されます。したがって,(s, u) と (x, y) は
s = x cos θ + y sin θ
u = −x sin θ + y cos θ,
x = s cos θ − u sin θ
y = s sin θ + u cos θ
という関係で互いに変換されます。
g(s, θ) は,f(x, y) のうち「x, y 座標の原点から s 隔たり,法線ベクト
貫かれる部分の合計です。したがって,g(s, θ) は,(x, y) が (10) 式の関
f(x, y) の積分,すなわち
∞
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin
= F(ξ cos θ, ξ sin θ)
となります。
fxF(fx, fy)
y
θ
ξ
ξ
Gθ(ξ)
図 3: 投影定理.
す。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
sdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18
67.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
68.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
69.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
70.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
71.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
72.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
73.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
74.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
75.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
有限個の投影では,2次元フーリエ変換を埋め尽くす
ことはできない
76.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
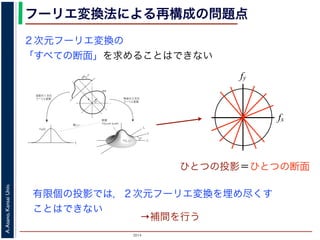
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
2次元フーリエ変換の
「すべての断面」を求めることはできない
fx
fy
ひとつの投影=ひとつの断面
有限個の投影では,2次元フーリエ変換を埋め尽くす
ことはできない
→補間を行う
77.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
補間を行う。が,コンピュータで計算する限りは「離散的」
78.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
補間を行う。が,コンピュータで計算する限りは「離散的」
79.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
補間を行う。が,コンピュータで計算する限りは「離散的」
80.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
断面は極座標
補間を行う。が,コンピュータで計算する限りは「離散的」
81.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
断面は極座標
補間を行う。が,コンピュータで計算する限りは「離散的」
82.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
断面は極座標
補間を行う。が,コンピュータで計算する限りは「離散的」
2次元フーリエ変換は
正方座標
83.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
断面は極座標
補間を行う。が,コンピュータで計算する限りは「離散的」
2次元フーリエ変換は
正方座標
84.
2014
A.Asano,KansaiUniv.
フーリエ変換法による再構成の問題点
fxF(fx, fy)
fy
θ
ξ
断面
F(ξcosθ, ξsinθ)
ξ
Gθ(ξ)
等しい
x
y
θ
s
sg(s,θ)
u
物体
投
影
物体の2次元
フーリエ変換
投影の1次元
フーリエ変換
図 3: 投影定理.
となります。これに上で説明した (x, y) 座標と (s, u) 座標との変数変換を行うと,先に述べたように
dxdy = dsdu ですから,
Gθ(ξ) =
∞
−∞
f(x, y)
exp(−i2πξ(x cos θ + y sin θ))dxdy
=
∞
−∞
f(x, y)
exp(−i2π((ξ cos θ)x + (ξ sin θ)y))dxdy
= F(ξ cos θ, ξ sin θ) (18)
となります。
フーリエ変換法による再構成
投影定理によれば, ひとつの角度 θ における投影を得ると,物体のフーリエ変換のひとつの断面がわか
ることになります。したがって,すべての θ についての投影を求めれば,物体のフーリエ変換 F(fx, fy)
の形はすべて求まります。こうやって得られた F(fx, fy) を逆フーリエ変換すれば,もとの物体 f(x, y)
が再構成されます。このような再構成法を,フーリエ変換法 (Fourier transform method) による再構
fx
fy
断面は極座標
周波数空間の誤差は,画像全体に
ひろがるアーティファクトを生む
補間を行う。が,コンピュータで計算する限りは「離散的」
2次元フーリエ変換は
正方座標




























































































![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)























































