Download to read offline
![Problem Definition
• Input: Digraph G = (V, A), s, t ∈ V , u : A → [1, . . . , U ].
• n = |V | and m = |A|.
• Similarity assumption [Gabow 85]: log U = O(log n)
For modern machines log U, log n ≤ 64.
˜
• The O () bound ignores constants, log n, log U .
• Flow f : A → [0, . . . U ] obeys capacity constraints and con-
servation constraints.
• Flow value |f | is the total flow into t.
• Cut is a partitioning V = S ∪ T : s ∈ S, t ∈ T .
• Cut capacity u(S, T ) = v∈S,w∈T u(v, w).
Maximum flow problem: Find a maximum flow.
Minimum cut problem (dual): Find a minimum cut.
Binary Blocking Flows Andrew V. Goldberg 2](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-3-2048.jpg)
![Blocking Flows
f in G is blocking if every s-t path in G is saturated.
• The admissible graph G contains all arcs of Gf on s-t shortest
paths.
• G is acyclic.
• O(m log(n2/m)) algorithm to find a blocking flow in an acyclic
graph [Goldberg & Tarjan 90].
Blocking flow method:[Dinitz 70]
Repeatedly augment f by a blocking flow in Gf .
Binary Blocking Flows Andrew V. Goldberg 8](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-9-2048.jpg)
![Decomposition Barrier
• A flow can be decomposed into O(m) paths of length O(n).
• The total length of augmenting paths can be Ω(nm).
• Without data structures, the blocking flow algorithm takes
Ω(nm) time.
• But data structures allow changing flow on many arcs in one
operation.
Can we beat the Ω(nm) barrier?
For unit capacities, the blocking flow algorithm runs in O(min(m1/2, n2/3)
time [Karzanov 73] [Even & Tarjan 74].
Binary Blocking Flows Andrew V. Goldberg 10](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-11-2048.jpg)
![Binary Length Function
Algorithm intuition [Goldberg & Rao 1997]:
• Capacity-based lengths:
ℓ(a) = 1 if 0 < uf (a) < 2∆, ℓ(a) = 0 otherwise.
• Maintain residual flow bound F , update when improves by at
least a factor of 2.
√
• Set ∆ = F/ m.
• Find a flow of value ∆ or a blocking flow; augment.
√
• After O( m) ∆-augmentations F decreases.
√ √
• After 4 m blocking flow augmentations, d(s) ≥ 2 m.
• One of the cuts ({d(v) > i}, {d(v) ≤ i}) has no 0-length arcs
√
and at most m/4 length one arcs.
√
• After O( m) blocking flows F decreases.
Why stop blocking flow computation at ∆ value?
Binary Blocking Flows Andrew V. Goldberg 12](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-13-2048.jpg)
![Problem: Admissible Cycles
The admissible graph G is induced by arcs (v, w) ∈ Gf : d(v) =
d(w) + ℓ(v, w).
• G can have only cycles of zero-length arcs between vertices
with the same d.
• These arcs have capacities of at least 2∆.
′
• Contract SCCs of G to obtain acyclic G .
• ∆ flow can be routed in such a strongly connected graph in
linear time [Erlebach & Hagerup 02, Haeupler & Tarjan 07].
• Stop a blocking flow computation if the current flow has
value ∆.
′
• After finding a flow in G , extend it to a flow in G.
′
• A blocking flow in G is a blocking flow in G.
Binary Blocking Flows Andrew V. Goldberg 14](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-15-2048.jpg)
![Practicality
Non-unit lengths are a natural idea with a solid theoretical justi-
fication, but...
• [Hagerup et al 1998]: The binary blocking flow algorithm
implementation is more robust that the standard blocking
flow algorithm.
• So far, nobody was able to use length functions to get a
more robust implementation than good push-relabel imple-
mentations (we tried!).
• Theoretical obstacle – flow can move around cycles.
• Global re-computation of distances and contraction of the
SCCs is expensive.
Open problem: Are non-unit length functions practical?
Binary Blocking Flows Andrew V. Goldberg 20](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-21-2048.jpg)
![Push–Relabel Method
Push–relabel algorithms [Goldberg & Tarjan 1986] are more prac-
tical than blocking flow algorithms. Uses unit lengths.
• Preflow f [Karzanov 1974]: v = s may have flow excess
ef (v), but not deficit.
• Distance labeling gives lower bounds on distance to t in Gf .
Formally d : V → N , d(t) = 0, ∀(v, w) ∈ Gf , d(v) ≤ d(w) + 1.
• Initially d(v) = 1 for v = s, t, d(s) = n, arcs out of s are
saturated.
• Apply push and relabel operations until none applies.
• Algorithm terminates with a min-cut. Converting preflow
into flow is fast.
• Admissible arc: (v, w) ∈ Af : d(v) > d(w).
Binary Blocking Flows Andrew V. Goldberg 21](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-22-2048.jpg)
![Min-Cost Flows
Problem definition: Additional cost per unit of flow c(a); find
maximum flow of minimum cost.
Min-cost flow algorithms:
• For unit lengths, max-flow + cost-scaling = min-cost flow
with log(nC) slowdown, where C is the maximum arc length.
• In particular, get an O(nm log(n2/m) log(nC)) algorithm.
• For unit capacities, [Gabow & Tarjan 87] give an
O(min(n2/3m1/2)m log(nC)) algorithm.
Open problem: For min-cost flows with integral data, is there
an O(min(n2/3m1/2)m log(nC) log U ) algorithm?
...or a more modest O n1−ǫm algorithm for ǫ > 0?
˜
Binary Blocking Flows Andrew V. Goldberg 24](https://image.slidesharecdn.com/20080603binaryblockingflowgoldberg-100622233056-phpapp02/75/Andrew-Goldberg-The-Binary-Blocking-Flow-Algorithm-for-the-Maximum-Flow-Problem-25-2048.jpg)

The document describes the binary blocking flow algorithm for solving the maximum flow problem. It begins with defining the maximum flow problem and applications of flows. It then provides the history and outline of blocking flow algorithms. The key aspects of the binary blocking flow algorithm are that it assigns binary lengths to arcs based on their residual capacities, finds flows or blocking flows of value Δ, and contracts strongly connected components to ensure the graph remains acyclic. The algorithm iterates these steps to find the maximum flow in O(m^3/2 log(n^2/m) log U) time.
Introduces the Binary Blocking Flow Algorithm by Andrew V. Goldberg from Microsoft Research.
Discusses the theoretical foundations versus practical implications in flow algorithms.
Defines maximum flow problem with terms like digraph, capacity constraints, flow value, and cut.
Highlights applications in operations research, computer vision, web applications, and AI.
Explains the specific use of binary blocking flows in artificial insemination using flow concepts.
Outlines discussion points including history, algorithm methods, and open problems in flow algorithms.
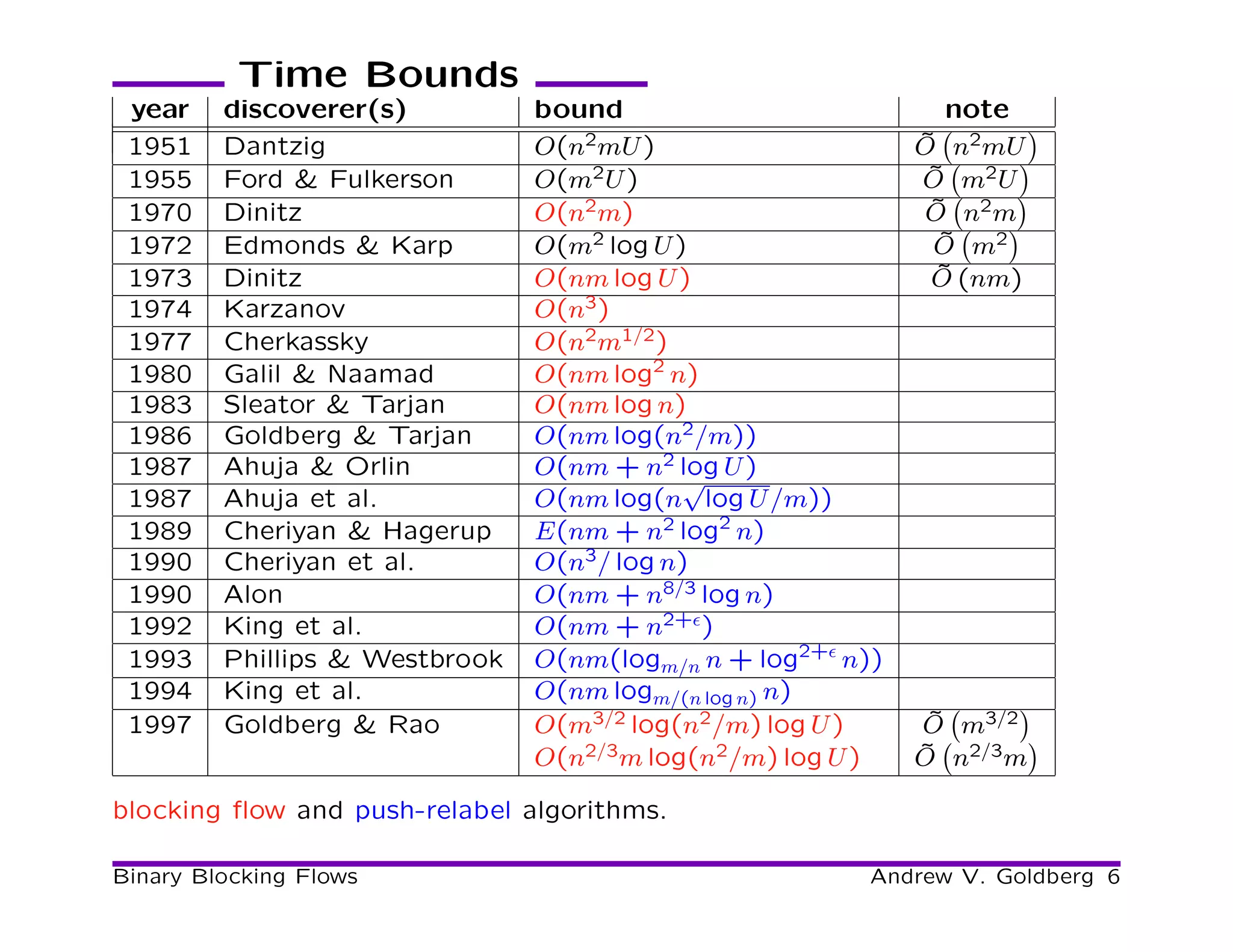
Presents historical time bounds of various algorithms from 1951 to 1997, with big O notation.
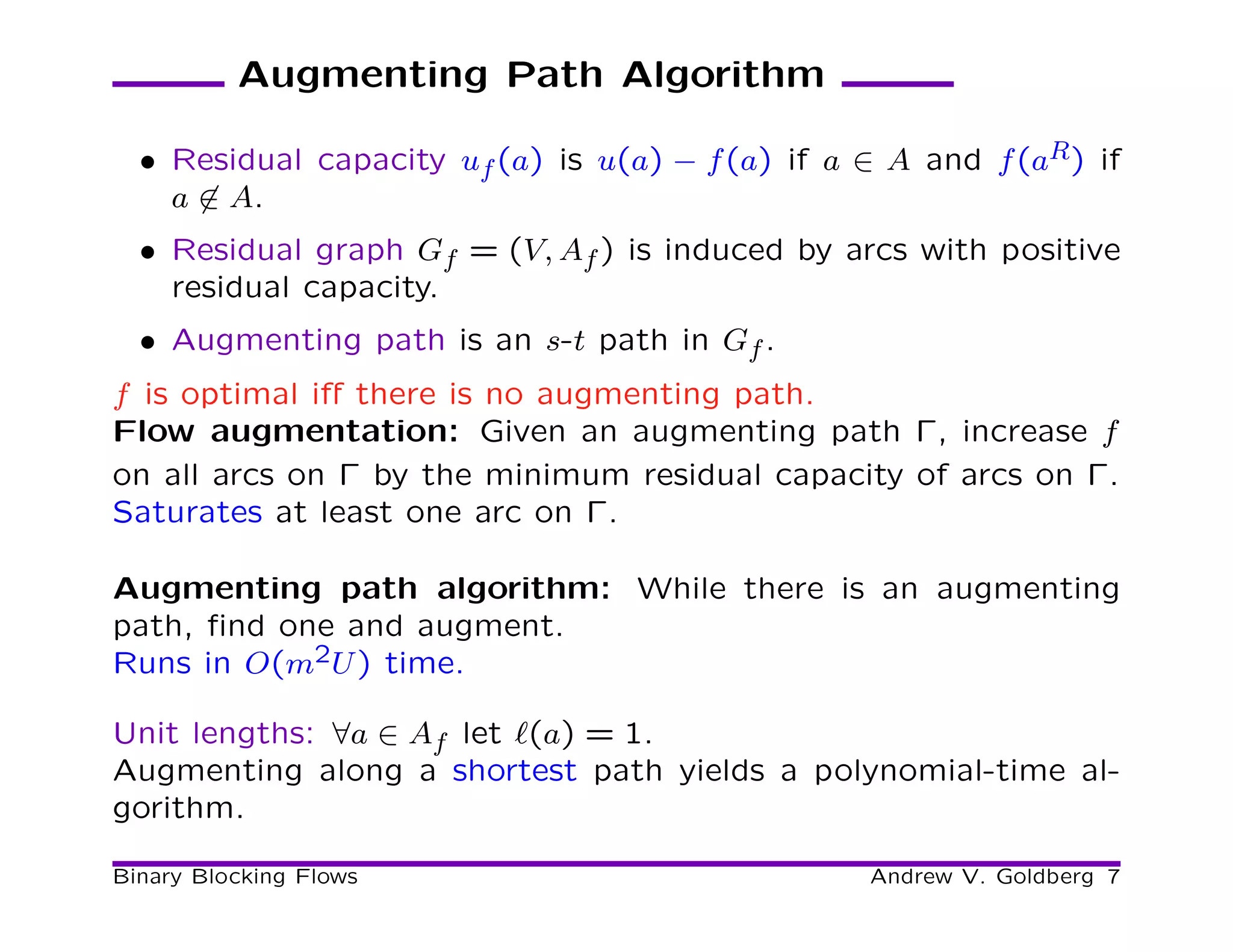
Describes the augmenting path method, residual capacities, and optimal flow conditions.
Defines a blocking flow and discusses conditions for saturation in flow networks.
Analyzes the blocking flow algorithm's iterations and distance improvements.
Discusses potential barriers in flow decomposition and efficiency issues in blocking flows.
Presents findings on unit capacities and iterations required for blocking flow algorithm.
Explains a specific algorithm intuition related to capacity-based lengths in flows.
Discusses implications of zero-length arcs on flow behavior and graph acyclic nature.
Presents issues with admissible cycles in the flow graph and suggests solutions.
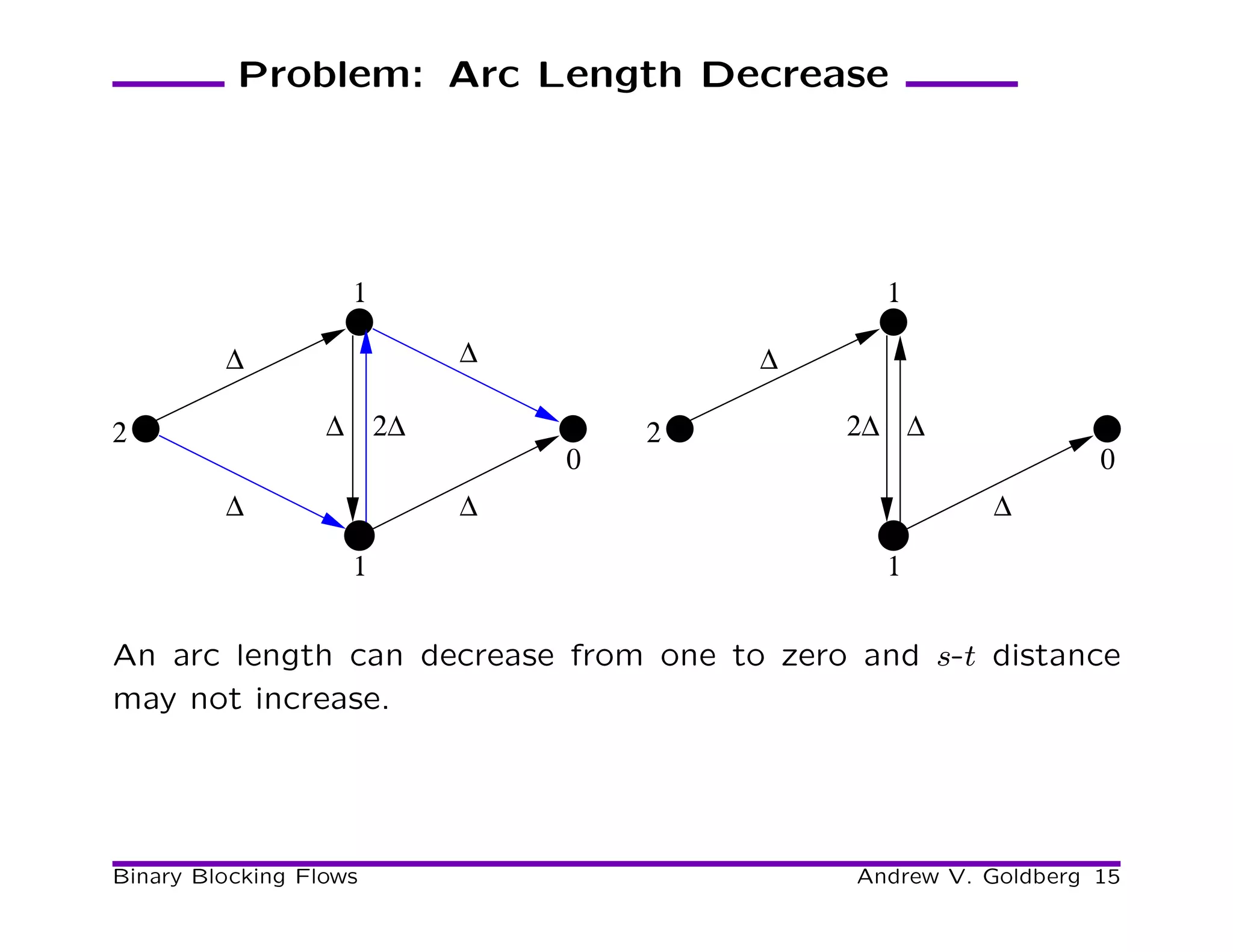
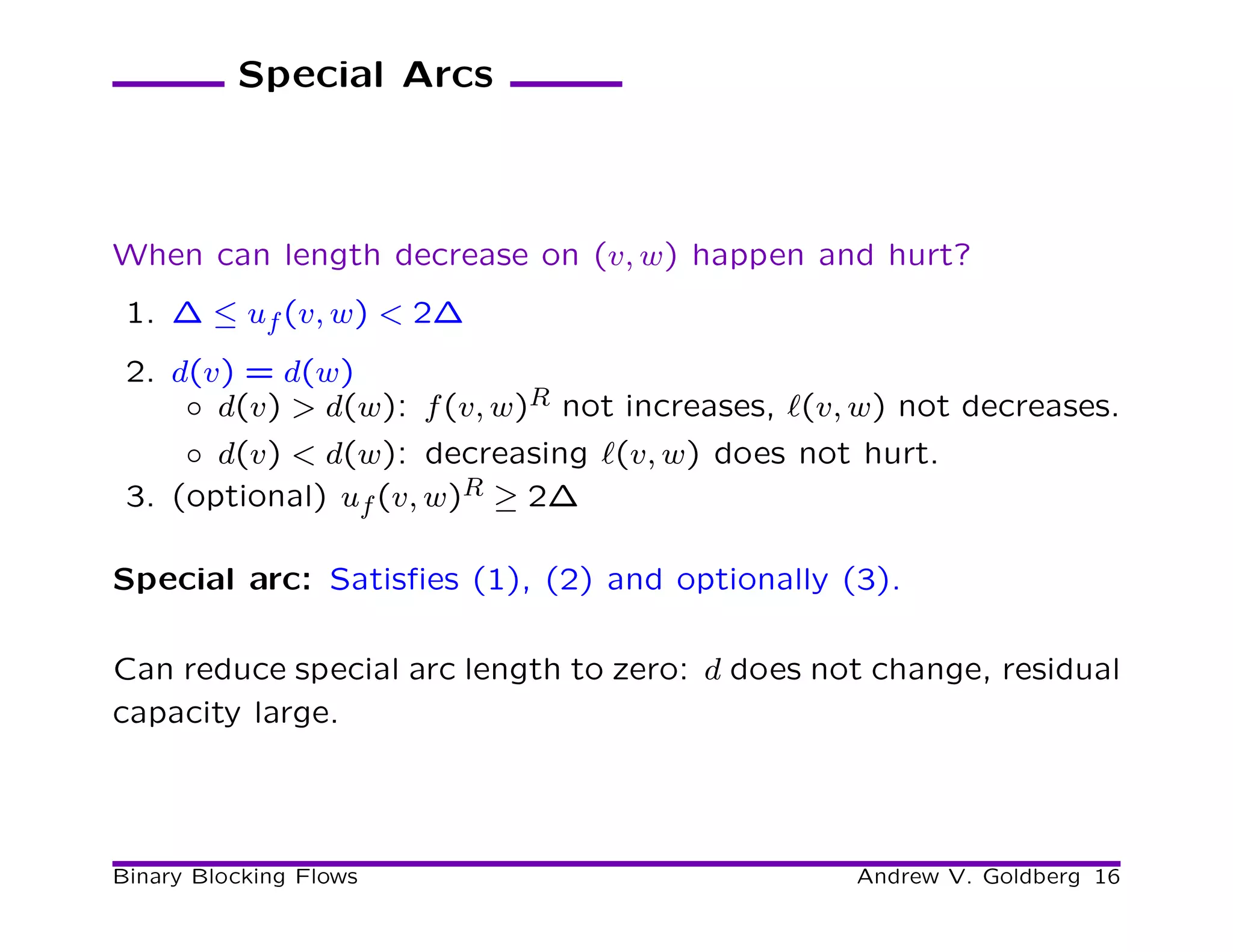
Explores challenges when arc lengths decrease on flow networks and its effects.
Identifies characteristics of special arcs and their influence on flow behavior.
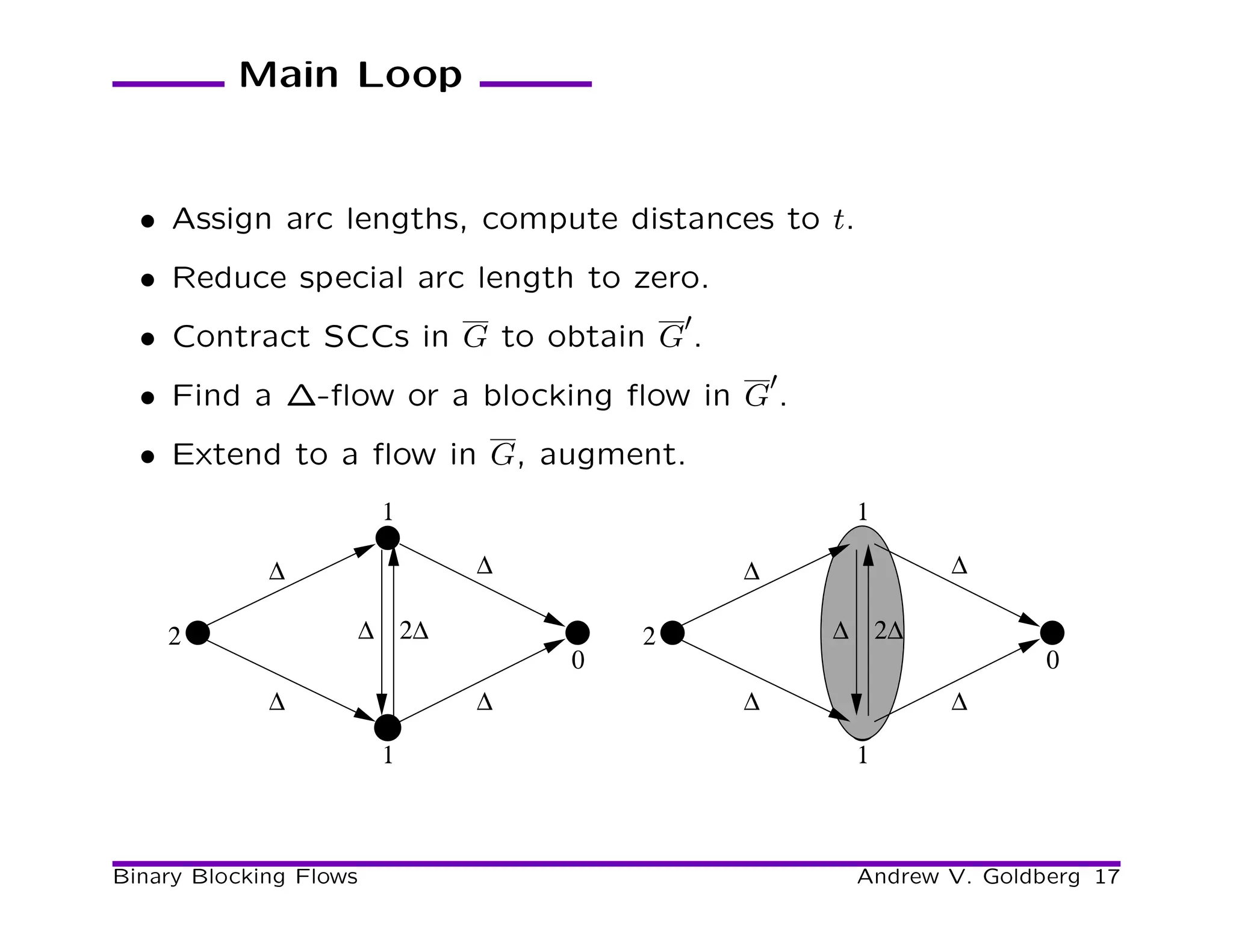
Describes the main operational steps involved in binary blocking flow algorithm.
Presents a theorem on distance monotonicity in blocking flow algorithms.
Analyzes iteration bounds and the efficiency of blocking flow algorithms.
Discusses the practical challenges of implementing blocking flow algorithms.
Explains the push-relabel method for flow computation and its advantages.
Details on the workings of push-relabel operations in flow networks.
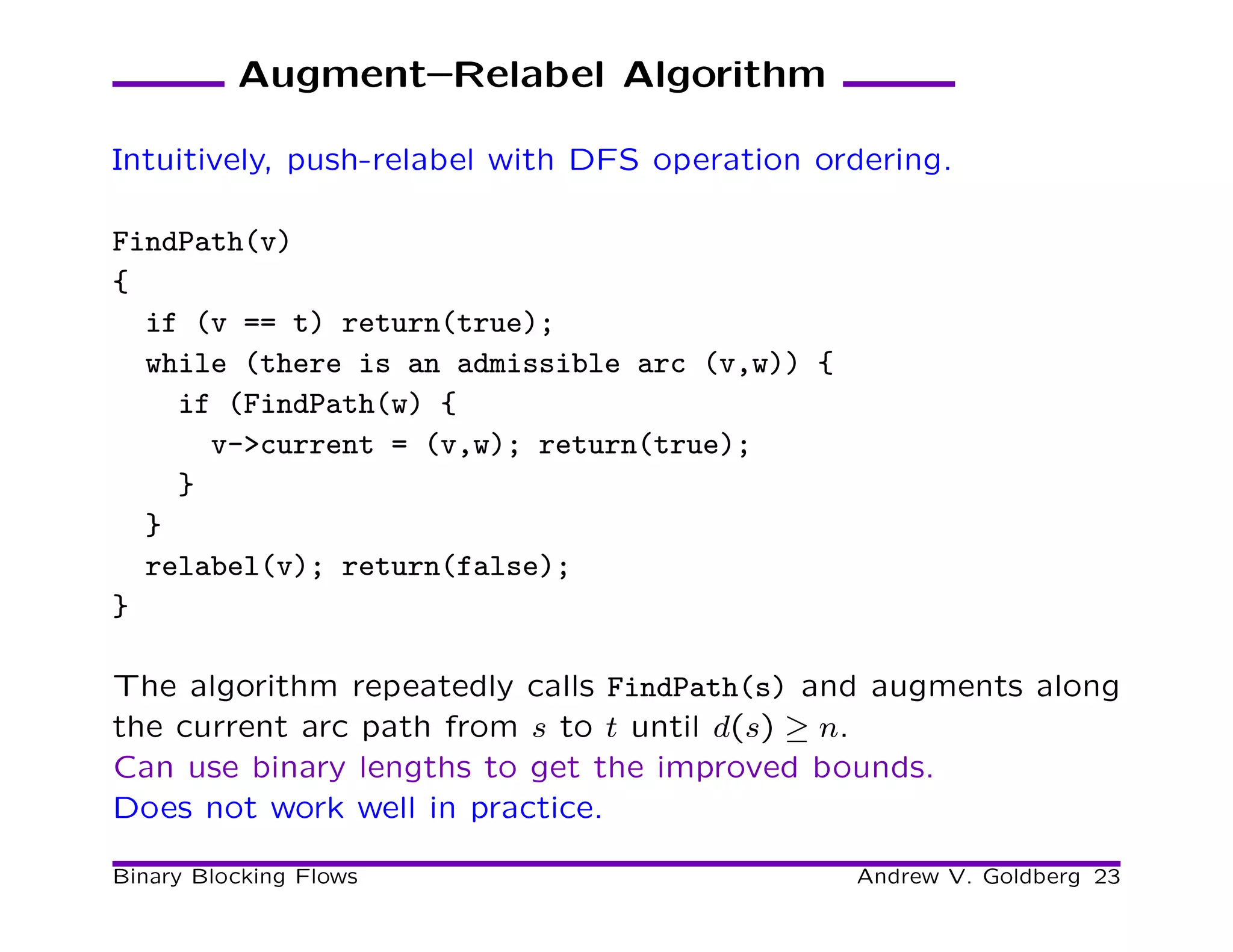
Introduces augment-relabel algorithm, its operations, and practical application.
Describes additional cost per unit for flows and algorithms for min-cost flows.
Summarizes the findings on maximum capacity flows and future directions.