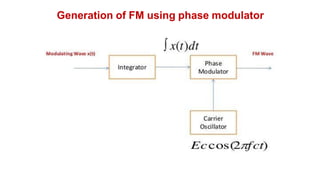
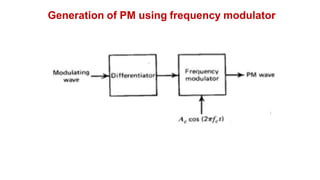
1. Angle modulation varies the angle of the carrier signal based on the message signal. This includes phase modulation, which varies the phase, and frequency modulation, which varies the frequency.
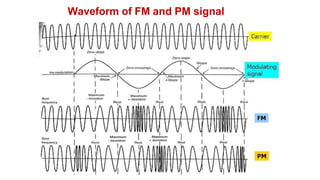
2. In phase modulation, the phase is varied linearly with the message signal. In frequency modulation, the frequency is varied linearly with the message signal.
3. For a single frequency message signal, frequency modulation results in a carrier signal with its frequency modulated above and below the center frequency by an amount proportional to the amplitude of the message signal.
![Definition of angle Modulation
• Angle – Frequency and phase
• The angle modulated wave is mathematically expressed as
s(t) Ac cos[i (t)] (1)
• AC - Amplitude of the carrier signal
• θi(t) – Angle of modulated sinusoidal carrier
• If θi(t) increases monotonically with time over an interval range from t to
(t+Δt), the average frequency is given as
(t)
i (t t) i (t)
(2)
2t
ff](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-3-320.jpg)
![Phase Modulation (PM)
• Phase Modulation is the process of varying phase angle of the high
frequency carrier signal inaccordance with the instantaneous amplitude
of the low frequency message signal
• θi(t) is varied linearly with respect to the message signal m(t)
i (t) 2fct kpm(t) (5)
• Where kp is the phase sensitivity of the modulator (rad/v)
• The phase modulated signal is given as
s(t) Ac cos[2fct kpm(t)] (6)](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-7-320.jpg)
![Phase Modulation (PM)
• Phase Modulation is the process of varying phase angle of the high
frequency carrier signal inaccordance with the instantaneous amplitude
of the low frequency message signal
• θi(t) is varied linearly with respect to the message signal m(t)
i (t) 2fct kpm(t) (5)
• Where kp is the phase sensitivity of the modulator (rad/v)
• The phase modulated signal is given as
s(t) Ac cos[2fct kpm(t)] (6)
s(t) Ac cos[2fct mp cosmt] (7)
• Modulation index(mp) or Phase deviation(Δθ) mp k pAm (rad)](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-8-320.jpg)
![Frequency Modulation (FM)
• Frequency Modulation is the process of varying frequency of the high
frequency carrier signal inaccordance with the instantaneous amplitude
of the low frequency message signal
• fi(t) is varied linearly with respect to the message signal m(t)
fi (t) fc kf m(t) (8)
• Where kf is the frequency sensitivity of the modulator (Hz/v)
• Integrating Eq.(8) w.r.t to time and multiplying the result by 2π, we get
i (t) 2 fi (t)dt
t
i (t) 2fct 2kf m()d (9)
0
• The frequency modulated signal in time domain is given as
t
s(t) Ac cos[2fct 2kf m()d] (10)
0](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-12-320.jpg)
![Frequency modulation by single frequency message
signal
• The frequency modulated signal in time domain is given as
t
s(t) Ac cos[2fct 2k f m()d] (1)
0
• The above equation is nonlinear function of message signal
• The analysis of FM signal is much more difficult than AM signal
• Consider a sinusoidal message signal defined as](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-13-320.jpg)
![Frequency modulation by single frequency message
signal
• The frequency modulated signal in time domain is given as
t
s(t) Ac cos[2fct 2k f m()d] (1)
0
• The above equation is nonlinear function of message signal
• The analysis of FM signal is much more difficult than AM signal
• Consider a sinusoidal message signal defined as
m(t) Am cos2fmt (2)
• The instantaneous frequency of the FM signal is given as](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-14-320.jpg)
![Frequency modulation by single frequency message
signal
• The frequency modulated signal in time domain is given as
t
s(t) Ac cos[2fct 2k f m()d] (1)
0
• The above equation is nonlinear function of message signal
• The analysis of FM signal is much more difficult than AM signal
• Consider a sinusoidal message signal defined as
m(t) Am cos2fmt (2)
• The instantaneous frequency of the FM signal is given as
fi (t) fc kf Am cos2fmt
fi (t) fc f cos2fmt (3)
FrequencyDeviation f k f Am (Hz)](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-15-320.jpg)
![Frequency modulation by single frequency message
signal
• Using Eq.(3), the angle θi(t) of the FM signal is given as
i (t) 2 fi (t)dt
f
m
m
i c
(t) 2f t
f
sin 2f t (4)
• The modulation index is defined as
f
fm
i (t) 2fct sin 2fmt (5)
• The FM signal is given as
VFM (t) Ac cos[2fct sin 2fmt] (6)](https://image.slidesharecdn.com/10anglemodulation-230528183534-4abd57be/85/10-Angle_modulation-pdf-20-320.jpg)