This document outlines the syllabus and course objectives for the digital signal processing course ECE2006 being offered in the fall semester of 2021. The course aims to teach students concepts related to signals and systems in the time and frequency domains, design of analog and digital filters, and realization of digital filters using various structures. The syllabus is divided into 7 modules covering topics such as Fourier analysis, design of IIR and FIR filters, and realization of lattice filters. Students will be evaluated through continuous assessments, quizzes, assignments, and a final exam.
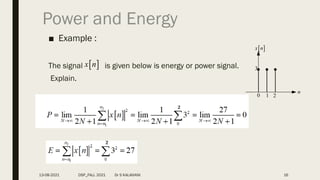
![1. Unit Impulse Signal
2. Unit Step Signal
3. Unit Ramp Signal
4. Sinusoidal Signal
5. Exponential Signal
13
BASIC SIGNALS 0
0
0
1
]
[
n
for
n
for
n
0
0
0
1
]
[
n
for
n
for
n
u
0
0
0
]
[
n
for
n
for
n
n
r
)
cos(
]
[
n
A
n
x
T
F
2
2
n
a
n
x n
;
]
[
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-13-320.jpg)
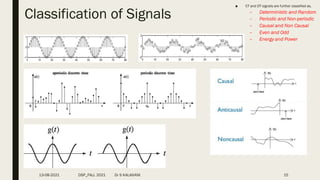
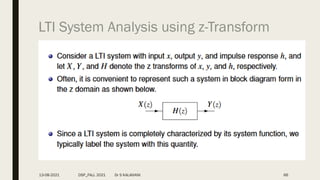
![• Systems process input signals to produce output signals
– Continuous/Discrete
– Linear/Non linear
– Causal/Non Causal
– Stable/Unstable
– Dynamic/Static
– Time variance/Time invariant
17
Classification of Systems
Causal: a system is causal if the output at a time, only depends on input values up to that time.
Linear: a system is linear if the output of the scaled sum of two input signals is the equivalent scaled
sum of outputs
Time-invariance: a system is time invariant if the system’s output is the same, given the same input
signal, regardless of time.
A system is called stable in the bounded-input bounded-output (BIBO) sense if every bounded input
sequence produces a bounded output sequence
A system is called memoryless /Static if the output y[n] at every value of n depends only on the
present input values of n
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-17-320.jpg)
![Ex. Y[n]=x[-n]
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI 18](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-18-320.jpg)

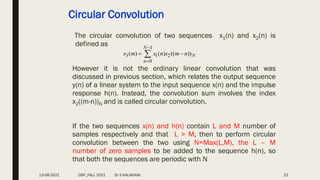

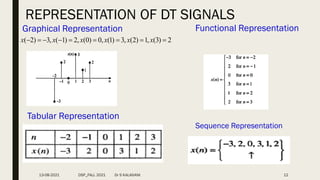
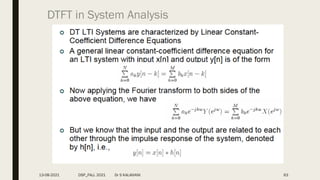
![Ex.1 Find the linear and circular (7-point) convolution of the
given sequences
x[n]={1, 2, 7, -2, 3, -1, 5} and h[n]={-1, 3, 5, -3, 1}
■ Linear Convolution:
y[n]={-1, 1, 4, 30, 21, -19, 20, -1, 31, -15,5}
■ Circular Convolution:
x[n]={1, 2, 7, -2, 3, -1, 5}
h[n]={-1, 3, 5, -3, 1, 0, 0}
y[n]={-2, 32,-12,35,21,20}
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI 25](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-25-320.jpg)

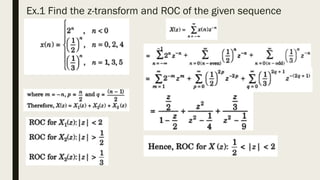
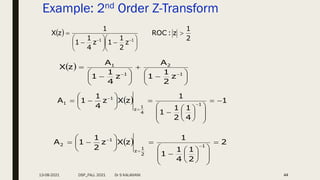
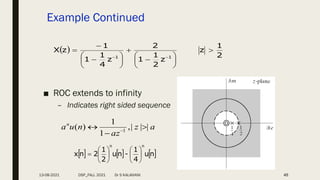
![Example 3: Find the signal corresponding to the z-transform
48
2
1
3
z
z
3
2
z
)
z
(
X
Solution:
5
.
0
z
1
z
z
5
.
0
z
5
.
0
z
5
.
1
z
5
.
0
z
z
3
2
z
)
z
(
X 2
3
2
1
3
5
.
0
z
4
1
z
1
z
1
z
3
5
.
0
z
1
z
z
5
.
0
z
)
z
(
X
2
2
5
.
0
z
z
)
4
(
1
z
z
z
1
3
)
z
(
X
or 1
1
1
z
5
.
0
1
1
4
z
1
1
z
3
)
z
(
X
]
n
[
u
5
.
0
4
]
n
[
u
]
1
n
[
]
n
[
3
]
n
[
x
n
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-48-320.jpg)
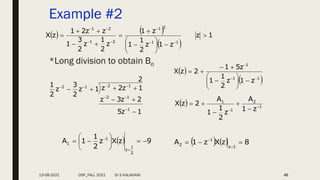
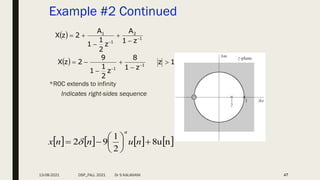
![Partial Fraction Method:
Example 4: Find the signal corresponding to the z-transform
49
2
1
1
z
2
.
0
1
z
2
.
0
1
1
)
z
(
Y
Solution:
2
3
2
.
0
z
2
.
0
z
z
)
z
(
Y
2
2
2
2
.
0
z
1
.
0
2
.
0
z
75
.
0
2
.
0
z
25
.
0
2
.
0
z
2
.
0
z
z
z
)
z
(
Y
2
2
.
0
z
z
1
.
0
2
.
0
z
z
75
.
0
1
z
z
25
.
0
)
z
(
Y
2
1
1
2
.
0
1
.
0
1
1
z
2
.
0
1
z
2
.
0
z
2
.
0
1
1
75
.
0
z
2
.
0
1
1
25
.
0
]
n
[
u
2
.
0
n
5
.
0
]
n
[
u
2
.
0
75
.
0
]
n
[
u
2
.
0
25
.
0
]
n
[
y
n
n
n
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-49-320.jpg)
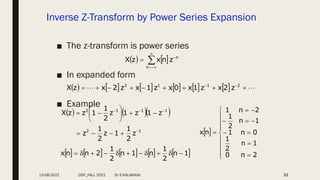
![Inverse Z-Transform by Power Series Expansion
■ The z-transform is power series
■ In expanded form
■ Causal/Right sided sequence:
■ Non-Causal/Left sided sequence:
51
n
n
z
n
x
z
X
2
1
1
2
z
2
x
z
1
x
0
x
z
1
x
z
2
x
z
X
2
1
2
1
0 z
x
z
x
x
z
X
1
2
1
2 z
x
z
x
z
X
x[n] ->co-eff of NEGATIVE powers of ‘z’
x[n] ->co-eff of POSITIVE powers of ‘z’
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-51-320.jpg)
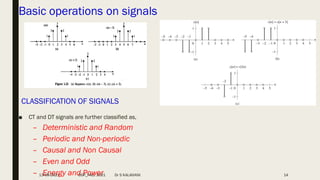
![Power Series Method
Example 1: Determine the z-transform of RSS
53
2
1
z
5
.
0
z
5
.
1
1
1
)
z
(
X
By dividing the numerator of X(z) by its
denominator, we obtain the power series
...
z
z
z
z
1
z
z
1
1 4
16
31
3
8
15
2
4
7
1
2
3
2
2
1
1
2
3
x[n] = [1, 3/2, 7/2, 15/8, 31/16,…. ]
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-53-320.jpg)
![Power Series Method
Example 2:Determine the z-transform of
54
2
1
1
z
z
2
2
z
4
)
z
(
X
By dividing the numerator of X(z) by its
denominator, we obtain the power series
x[n] = [2, 1.5, 0.5, 0.25, …..]
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-54-320.jpg)
![The Discrete-Time Fourier Transform
■ The discrete-time Fourier transform (DTFT) or, simply, the Fourier
transform of a discrete–time sequence x[n] is a representation of
the sequence in terms of the complex exponential sequence
where is the real frequency variable.
■ The discrete-time Fourier transform of a sequence x[n] is
defined by
j x
e
j
X e
[ ]
j j n
n
X e x n e
j x
e
j
X e
DSP_FALL 2021 Dr S KALAIVANI Discrete-Time Signals in the Transform-Domain 58](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-58-320.jpg)
![The Discrete-Time Fourier Transform
■ Convergence Condition:
If x[n] is an absolutely summable sequence, i.e.,
Thus the equation is a sufficient condition for the existence of
the DTFT.
n
j j n
n n
if x n
then X e x n e x n
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI 59](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-59-320.jpg)

![Ex. A discrete-time LTI system has impulse response h[n],Find
the output y[n] due to input x[n].
13-08-2021 DSP_FALL 2021 Dr S KALAIVANI 65](https://image.slidesharecdn.com/module11-230528185141-dbb4e178/85/Module-1-1-pdf-65-320.jpg)