This document discusses analog to digital conversion and signal sampling and reconstruction. It begins by explaining the advantages of digital over analog communication and the process of analog to digital conversion using pulse code modulation. It then covers the sampling theorem, which states that a bandlimited signal can be reconstructed from samples taken at or above the Nyquist rate. The document provides the mathematical representations of sampling and discusses how the spectrum of a sampled signal consists of copies of the original spectrum spaced at integer multiples of the sampling frequency. It describes how reconstruction involves the use of an interpolation filter, such as the sinc function, to filter out copies and reconstruct the original signal from its samples. Finally, it discusses practical considerations in sampling and reconstruction.
![Sampling Theorem
A signal whose spectrum is band limited to 𝐵 𝐻𝑧
[𝐺(𝑓) = 0 𝑓𝑜𝑟 |𝑓| > 𝐵] can be reconstructed exactly from its samples taken
uniformly at a rate 𝑅 > 2𝐵 𝐻𝑧 (samples/ sec). i.e 𝑇𝑆 <
1
2𝐵
Minimum sampling frequency is 𝑓𝑠 = 2𝐵 𝐻𝑧 𝑁𝑦𝑞𝑢𝑖𝑠𝑡 𝑅𝑎𝑡𝑒
𝑇𝑠 =
1
2𝐵
Nyquist interval
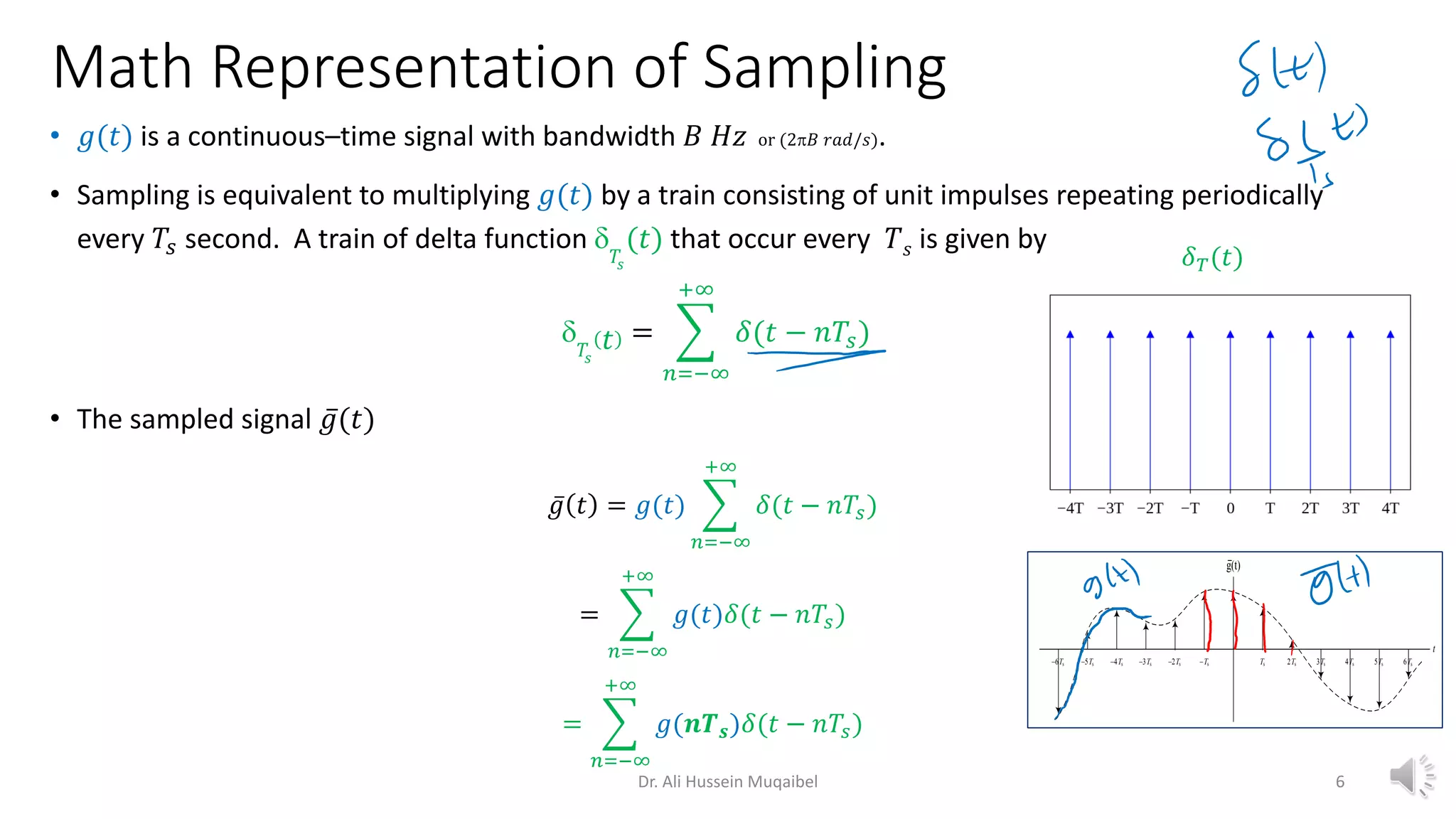
The 𝑛𝑡ℎ impulse located at 𝑡 = 𝑛𝑇𝑠 has a strength 𝑔 𝑛𝑇𝑠 the value of 𝑔(𝑡) at 𝑡 = 𝑛𝑇𝑠
t
s s s s s s
s s s s s s
g(t)
Dr. Ali Hussein Muqaibel
𝑇𝑠 = 1/𝑓𝑠 sampling interval
5](https://image.slidesharecdn.com/1samplingandsignalreconstruction-230803065255-fd751cf0/75/1-Sampling-and-Signal-Reconstruction-pdf-5-2048.jpg)
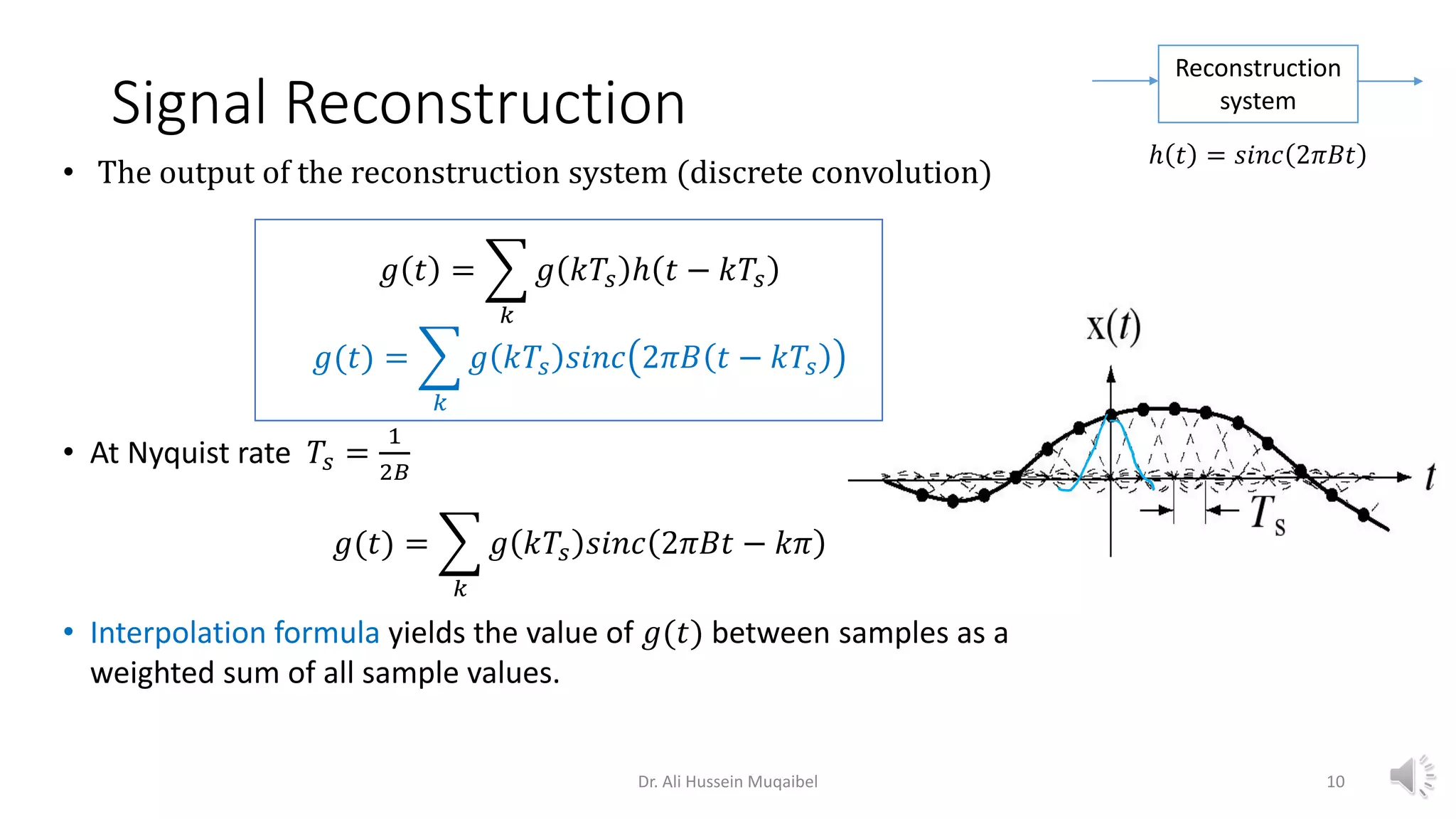
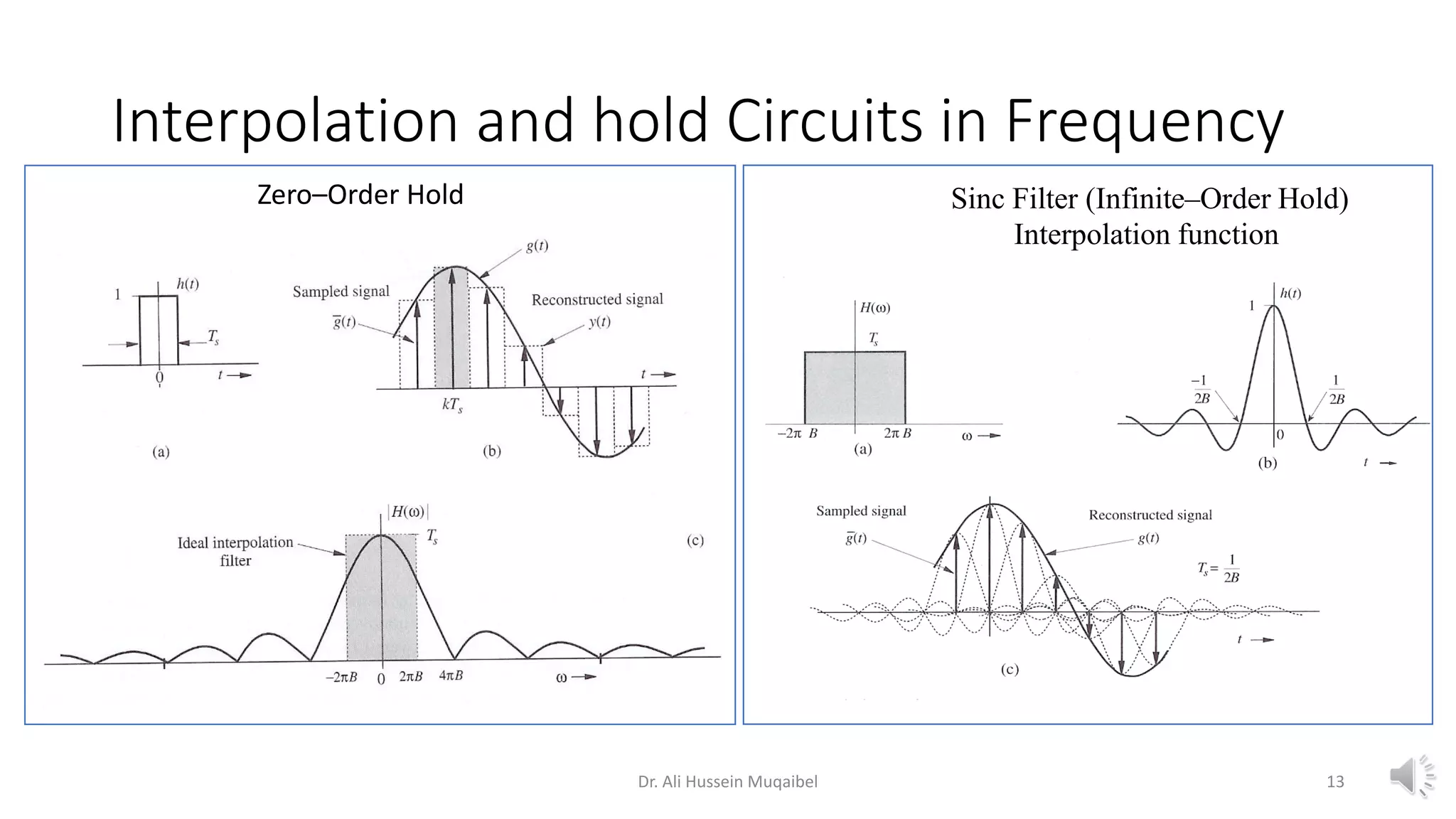
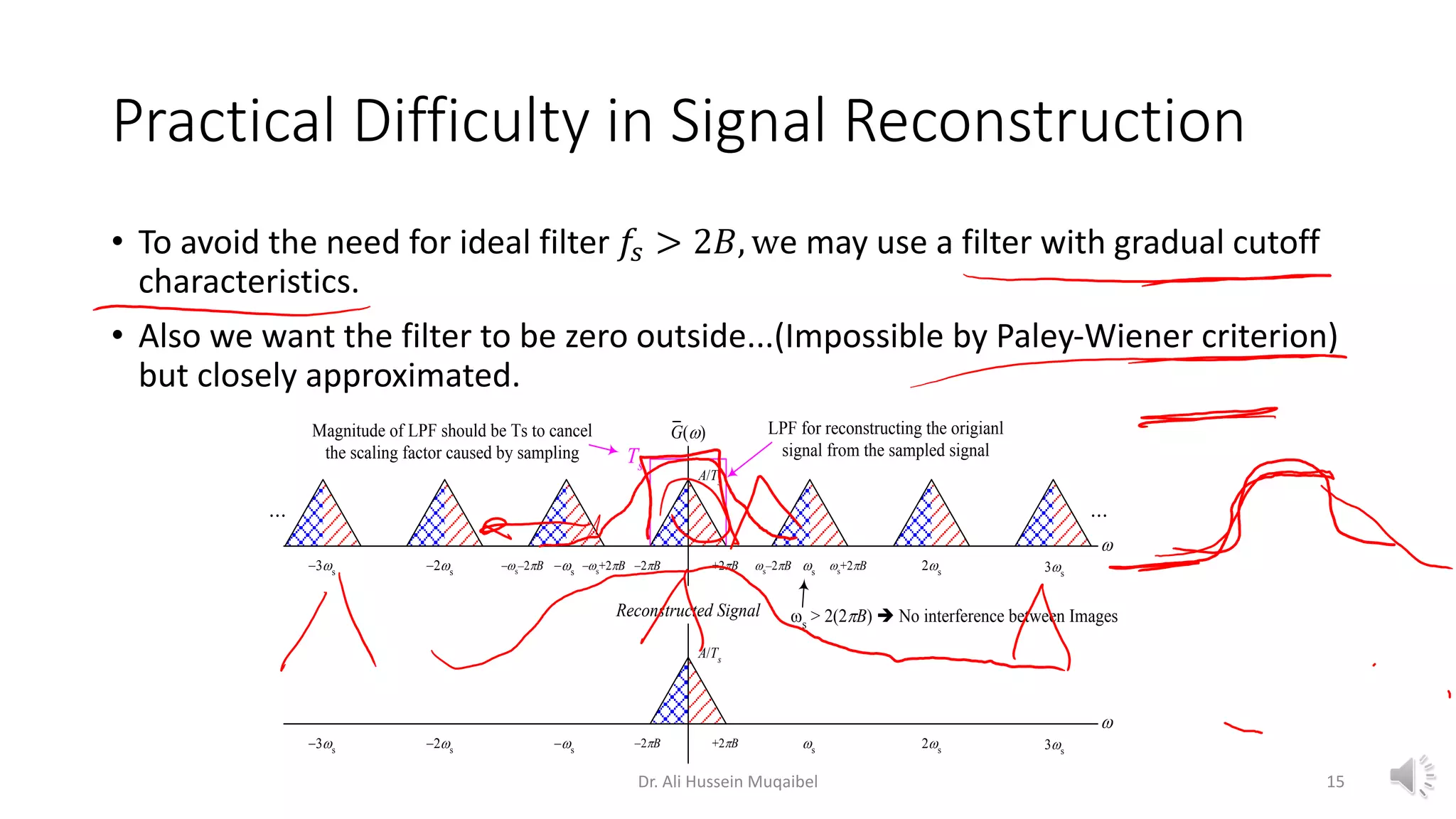
![Order of Signal Reconstruction (Reconstruction Filters)
Zero–Order Hold
Dr. Ali Hussein Muqaibel
Ts
g(t)
Ts
t
h0(t)
1
Ts
g(t)
1
Ts
t
h1(t)
–Ts
Ts
g(t)
First–Order Hold
–2Ts 2Ts
Ts
–Ts
1
t
hOO(t)
Sinc Filter (Infinite–Order Hold)
Ts
g(t)
12
𝑦 𝑡 = ℎ 𝑡 ∗ ҧ
𝑔 𝑡 = ℎ 𝑡 ∗ [𝑔 𝑡 𝛿𝑇𝑠
𝑡 ]](https://image.slidesharecdn.com/1samplingandsignalreconstruction-230803065255-fd751cf0/75/1-Sampling-and-Signal-Reconstruction-pdf-12-2048.jpg)


































![Digital Signal Processing[ECEG-3171]-Ch1_L05](https://cdn.slidesharecdn.com/ss_thumbnails/dspl5ch2-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)