Downloaded 56 times
![Linear vs nonlinear systems systems
• Linear system obeys the principle of
superposition
• T[a x1(n) + b x2(n)] = a T[x1(n)] + b T[x2(n)]
11](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-11-320.jpg)
![Multi channel and Multidimensional
Signals
• Multichannel:
• S(t) = [ s1(t), s2(t), s3(t)…]
• Multi Dimensional: A value of a signal is a
function of M independent variables.
• S(x,y,t) = [ s1(x,y,t), s2(x,y,t), s3(x,y,t)…]
25](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-25-320.jpg)
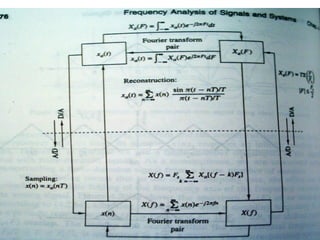
![x(t)
|X(f)|
t
0
-f
(a)
x
δ
∞
(t) =
n = -∞
δ (t-nT
s)
...
s
-2T
s
0
2T
s
4T
m
∞
1
T s
δ (f-nf
n = -∞
s
...
t
-2f
s
s
-f
0
s
fs
2f
f
s
(d)
δ
(t)
|X
s
(f)|
...
-4T
s
-2T
s
0
2T
s
4T
t
s
(e)
Ch2. Formatting
)
...
(c)
x s (t) = x(t) x
f
f
(b)
X δ (f) =
...
-4T
0
m
...
-2f
s
-f
s
-f
m
0
(f)
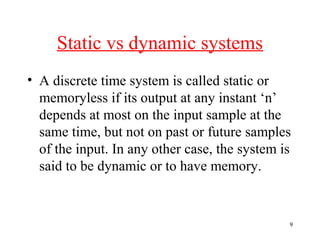
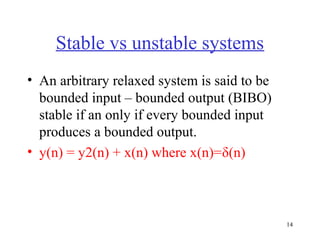
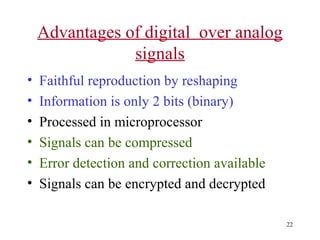
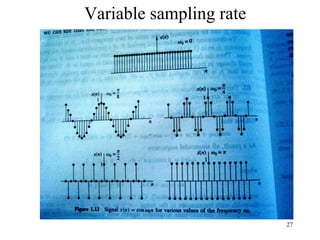
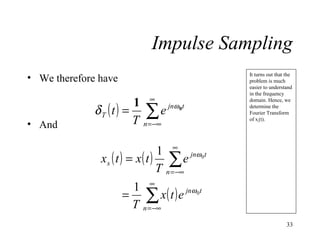
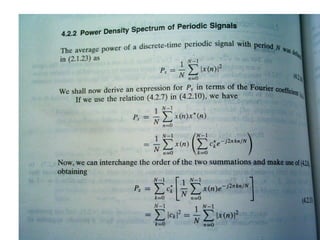
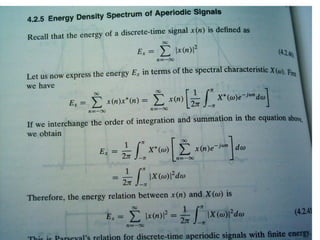
[Fig 2.6] Sa mp ling the orem u sing th e freq u en cy
co nvo lution pro pe rty o f the Fou rier tra nsform
fm
fs
2f
f
s
28
[6]](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-28-320.jpg)
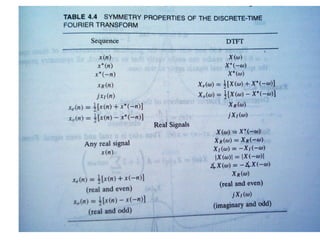
![Sampling
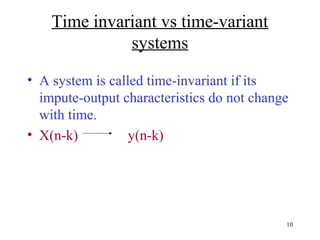
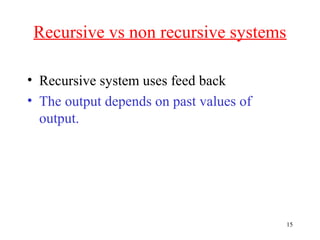
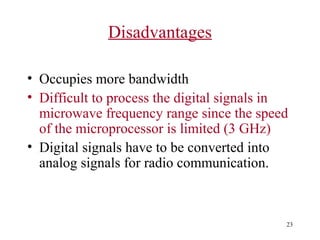
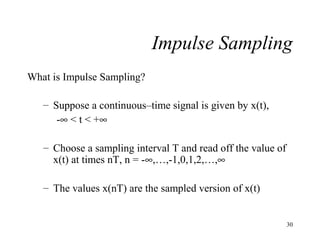
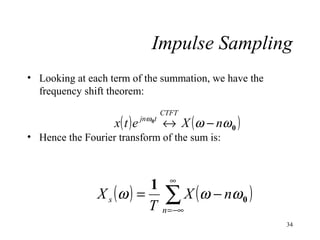
• The operation of A/D is to generate sequence by taking
values of a signal at specified instants of time
• Consider a system involving A/D as shown below:
x(t )
x (t)
Analog-todigital
converter
x(nT )
x[n]
xh(t)
0
T
2T 3T 4T 5T
Digital-toanalog
converter
xh (t )
x(t) is the input signal and xh(t) is the
sampled and reconstructed signal
t
T = sample period
29](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-29-320.jpg)

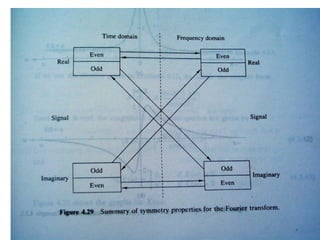
![Computing the Z-transform: an
example = α nu[n]
x[n]
• Example 1: Consider the time function
X(z) =
∞
∑
x[n]z −n =
n=−∞
=
1
1− αz
−1 =
∞
∑
n=0
α n z −n =
∞
∑ (αz −1 )n
n=0
z
z −α
59](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-59-320.jpg)
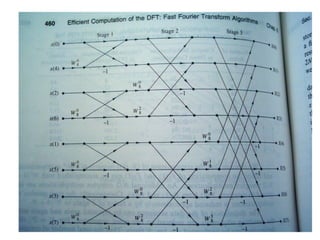
![Another example …
x[n] = −α nu[−n − 1]
X(z) =
∞
∑
−1
x[n]z −n =
n=−∞
∑
−α n z −n =
n=−∞
•
∑
n=−∞
(αz −1 )n =
∑ (αz −1 )n
n=−∞
l = −n;n = −∞ ⇒ l = ∞;n = −1 ⇒ l = 1
−1
−1
∞
∞
l=1
l=0
∑ −(zα −1 )l = 1 − ∑ (zα −1 )l = 1 −
1
1
=
1 − zα −1 1 − αz −1
60](https://image.slidesharecdn.com/tdmfdm-140222093544-phpapp02/85/Tdm-fdm-60-320.jpg)





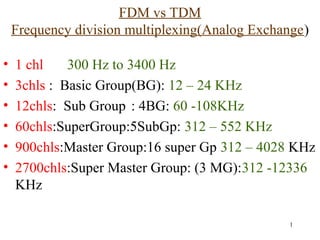
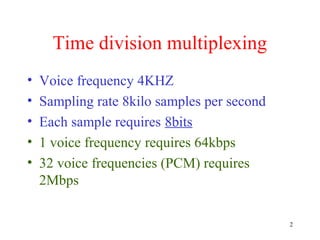
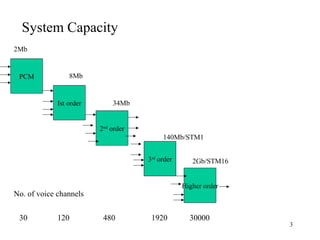
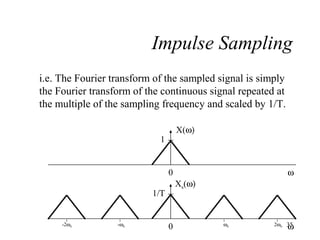
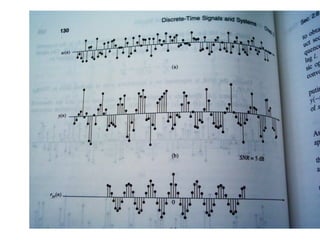
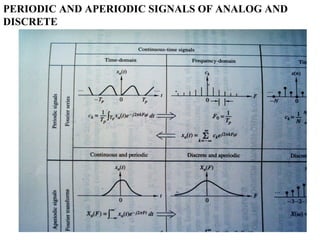
Frequency division multiplexing (FDM) divides the available bandwidth into non-overlapping frequency bands, with each band carrying a separate signal. Time division multiplexing (TDM) divides signals into different time slots to share the same frequency channel. TDM samples voice frequency signals at 8 kHz and quantizes each sample to 8 bits, requiring 64 kbps per voice channel. A 32-channel PCM system using TDM requires 2 Mbps of bandwidth and can carry more voice channels than FDM with the same bandwidth.