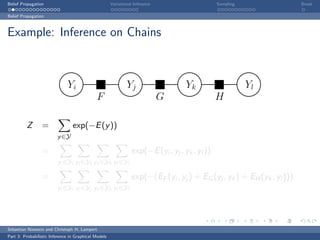
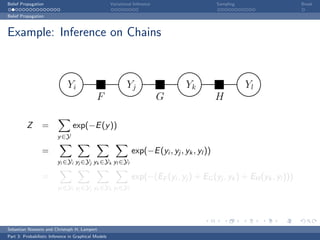
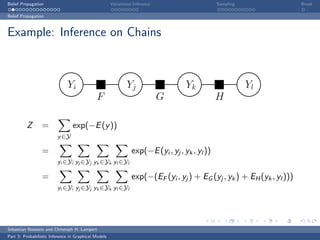
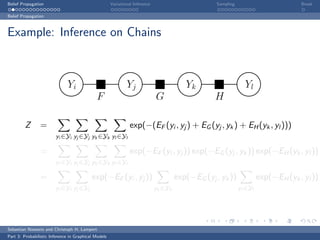
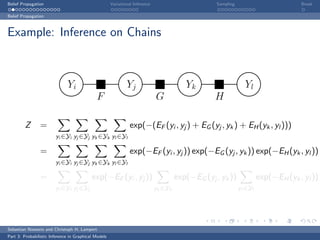
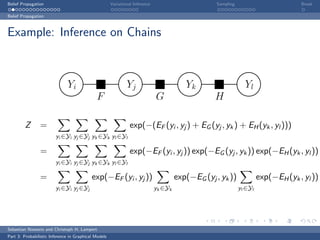
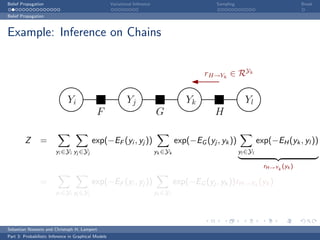
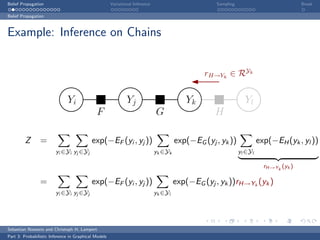
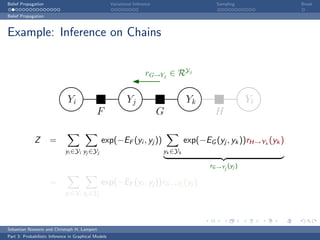
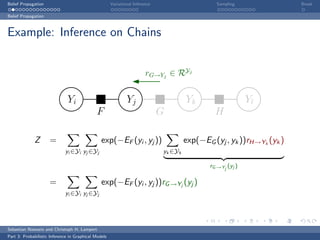
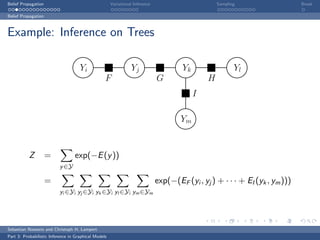
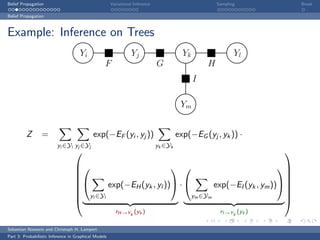
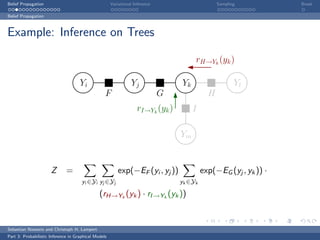
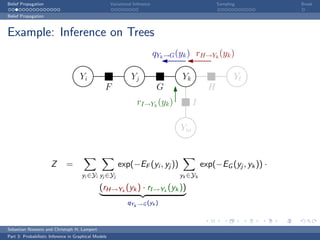
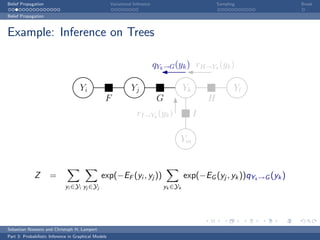
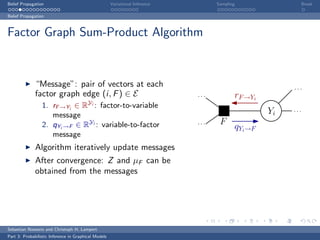
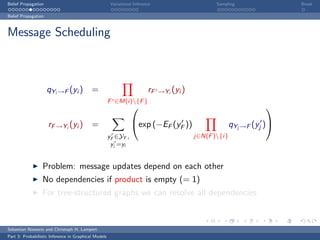
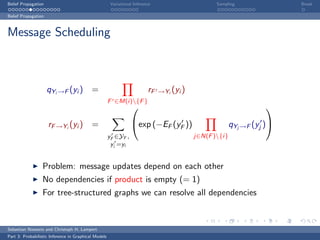
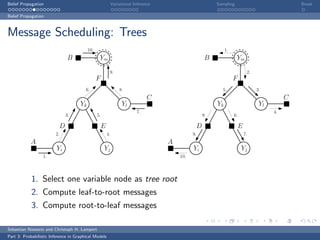
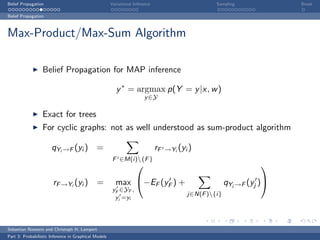
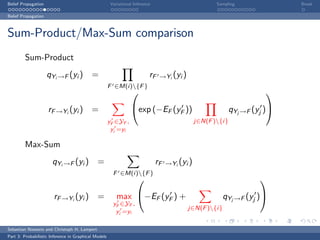
This document discusses belief propagation for probabilistic inference in graphical models. It provides an example of applying belief propagation to inference on a chain-structured graph. Belief propagation breaks the computation into message passing between nodes, allowing the inference to be computed by multiplying messages along the edges. This results in a closed form solution that avoids expensive computations over all joint assignments.
![Belief Propagation Variational Inference Sampling Break
Variational Inference
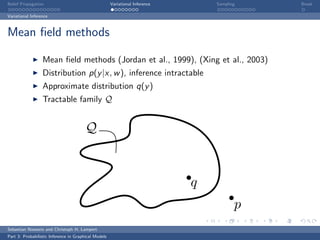
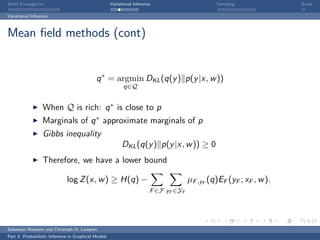
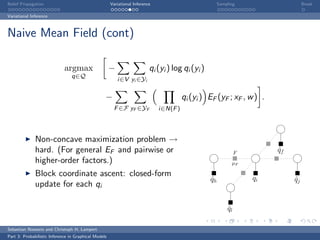
Naive Mean Field (cont)
Closed form update for qi :
qi∗ (yi ) =
exp 1 −
qj (yj ) EF (yF ; xF , w ) + λ
ˆ
F ∈F , yF ∈YF , j∈N(F ){i}
i∈N(F ) [yF ]i =yi
λ = − log
exp 1 − qj (yj ) EF (yF ; xF , w )
ˆ
yi ∈Yi F ∈F , yF ∈YF ,j∈N(F ){i}
i∈N(F ) [yF ]i =yi
Look scary, but very easy to implement
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-44-320.jpg)
![Belief Propagation Variational Inference Sampling Break
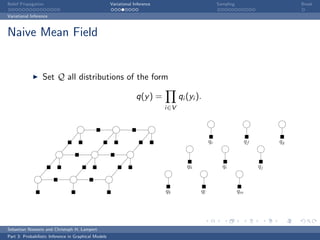
Sampling
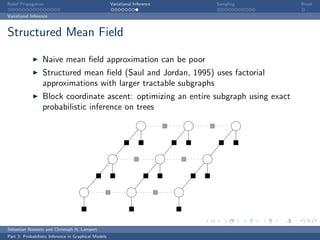
Sampling
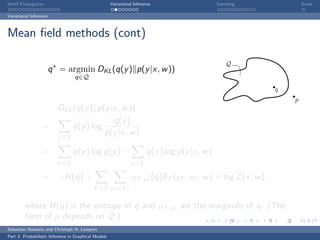
Probabilistic inference and related tasks require the computation of
Ey ∼p(y |x,w ) [h(x, y )],
where h : X × Y → R is an arbitary but well-behaved function.
Inference: hF ,zF (x, y ) = I (yF = zF ),
Ey ∼p(y |x,w ) [hF ,zF (x, y )] = p(yF = zF |x, w ),
the marginal probability of factor F taking state zF .
Parameter estimation: feature map h(x, y ) = φ(x, y ),
φ : X × Y → Rd ,
Ey ∼p(y |x,w ) [φ(x, y )],
“expected sufficient statistics under the model distribution”.
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-46-320.jpg)
![Belief Propagation Variational Inference Sampling Break
Sampling
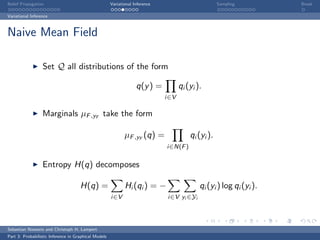
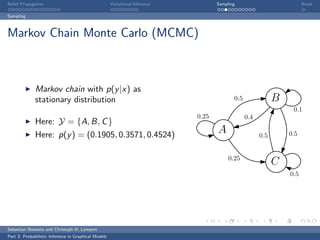
Sampling
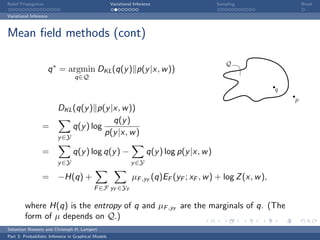
Probabilistic inference and related tasks require the computation of
Ey ∼p(y |x,w ) [h(x, y )],
where h : X × Y → R is an arbitary but well-behaved function.
Inference: hF ,zF (x, y ) = I (yF = zF ),
Ey ∼p(y |x,w ) [hF ,zF (x, y )] = p(yF = zF |x, w ),
the marginal probability of factor F taking state zF .
Parameter estimation: feature map h(x, y ) = φ(x, y ),
φ : X × Y → Rd ,
Ey ∼p(y |x,w ) [φ(x, y )],
“expected sufficient statistics under the model distribution”.
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-47-320.jpg)
![Belief Propagation Variational Inference Sampling Break
Sampling
Sampling
Probabilistic inference and related tasks require the computation of
Ey ∼p(y |x,w ) [h(x, y )],
where h : X × Y → R is an arbitary but well-behaved function.
Inference: hF ,zF (x, y ) = I (yF = zF ),
Ey ∼p(y |x,w ) [hF ,zF (x, y )] = p(yF = zF |x, w ),
the marginal probability of factor F taking state zF .
Parameter estimation: feature map h(x, y ) = φ(x, y ),
φ : X × Y → Rd ,
Ey ∼p(y |x,w ) [φ(x, y )],
“expected sufficient statistics under the model distribution”.
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-48-320.jpg)
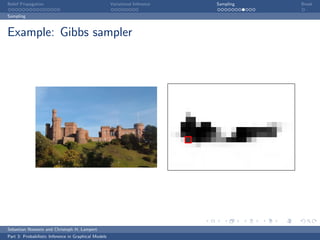
![Belief Propagation Variational Inference Sampling Break
Sampling
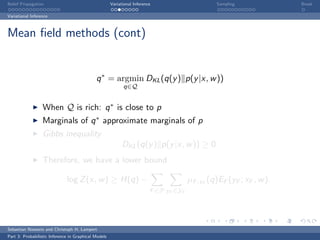
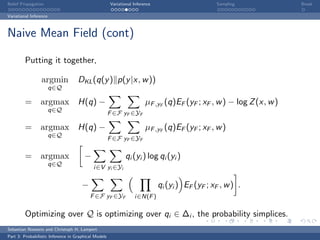
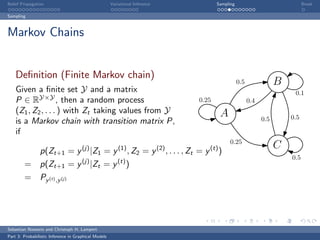
Monte Carlo
Sample approximation from y (1) , y (2) , . . .
S
1
Ey ∼p(y |x,w ) [h(x, y )] ≈ h(x, y (s) ).
S s=1
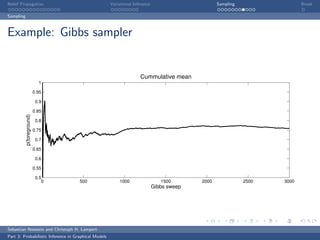
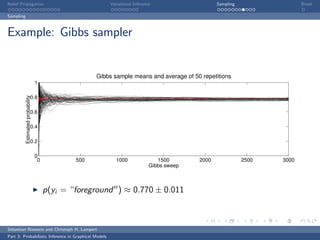
When the expectation exists, then the law of large numbers
guarantees convergence for S → ∞,
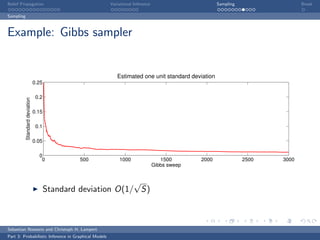
√
For S independent samples, approximation error is O(1/ S),
independent of the dimension d.
Problem
Producing exact samples y (s) from p(y |x) is hard
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-49-320.jpg)
![Belief Propagation Variational Inference Sampling Break
Sampling
Monte Carlo
Sample approximation from y (1) , y (2) , . . .
S
1
Ey ∼p(y |x,w ) [h(x, y )] ≈ h(x, y (s) ).
S s=1
When the expectation exists, then the law of large numbers
guarantees convergence for S → ∞,
√
For S independent samples, approximation error is O(1/ S),
independent of the dimension d.
Problem
Producing exact samples y (s) from p(y |x) is hard
Sebastian Nowozin and Christoph H. Lampert
Part 3: Probabilistic Inference in Graphical Models](https://image.slidesharecdn.com/02probabilisticinferenceingraphicalmodels-120305024300-phpapp02/85/02-probabilistic-inference-in-graphical-models-50-320.jpg)












![Lecture on nk [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/lectureonnkcompatibilitymode-110825092241-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)