Download as PDF, PPTX
![2 chain
X Y
e={Y=y}
X P(x) My|x X→Y
λ(x)=P(e|x)
BEL(x)=P(x|e) =P(Y=y|x)
=αP(x)P(e|x) ∵ =My|x (0,...,1,...,0)
=αP(x)λ(x) Y=y
=[P(e)]-1P(x)λ(x) ※ y
P(y | x )L P(Y = y | x ) LP(y | x )
1 1 1 n 1
M M M
P(y | x )L P(Y = y | x ) P(y | x )
1 m m n m
](https://image.slidesharecdn.com/random-120906011056-phpapp02/75/slide-13-2048.jpg)
![3 chain
X Y Z
λ(y)=P(Z=z|y)
e={Z=z}
BEL(x)=P(x|e) P(x) λ (x) = P(e | x) My|x
=Mz|y Mz|y
=αP(x)λ(x)
=[P(e)]-1P(x)λ(x) = ∑ P(e | y, x)P(y | x)
←x y
y
= ∑ P(e | y)P(y | x) ←I(X,Y,Z)
y
= M y|x • λ (y) P(y | x ) L P(y | x ) λ (y )
1 1 n 1
1
M y|x • λ (y) = M O M • M
P(y | x ) L P(y | x ) λ (y )
1 m n m
n
P(y | x )λ (y ) +L+ P(y | x )λ (y )
1 1 1 n 1 n
= M
P(y | x )λ (y ) +L+ P(y | x )λ (y )
1 m 1 n m n
](https://image.slidesharecdn.com/random-120906011056-phpapp02/75/slide-14-2048.jpg)
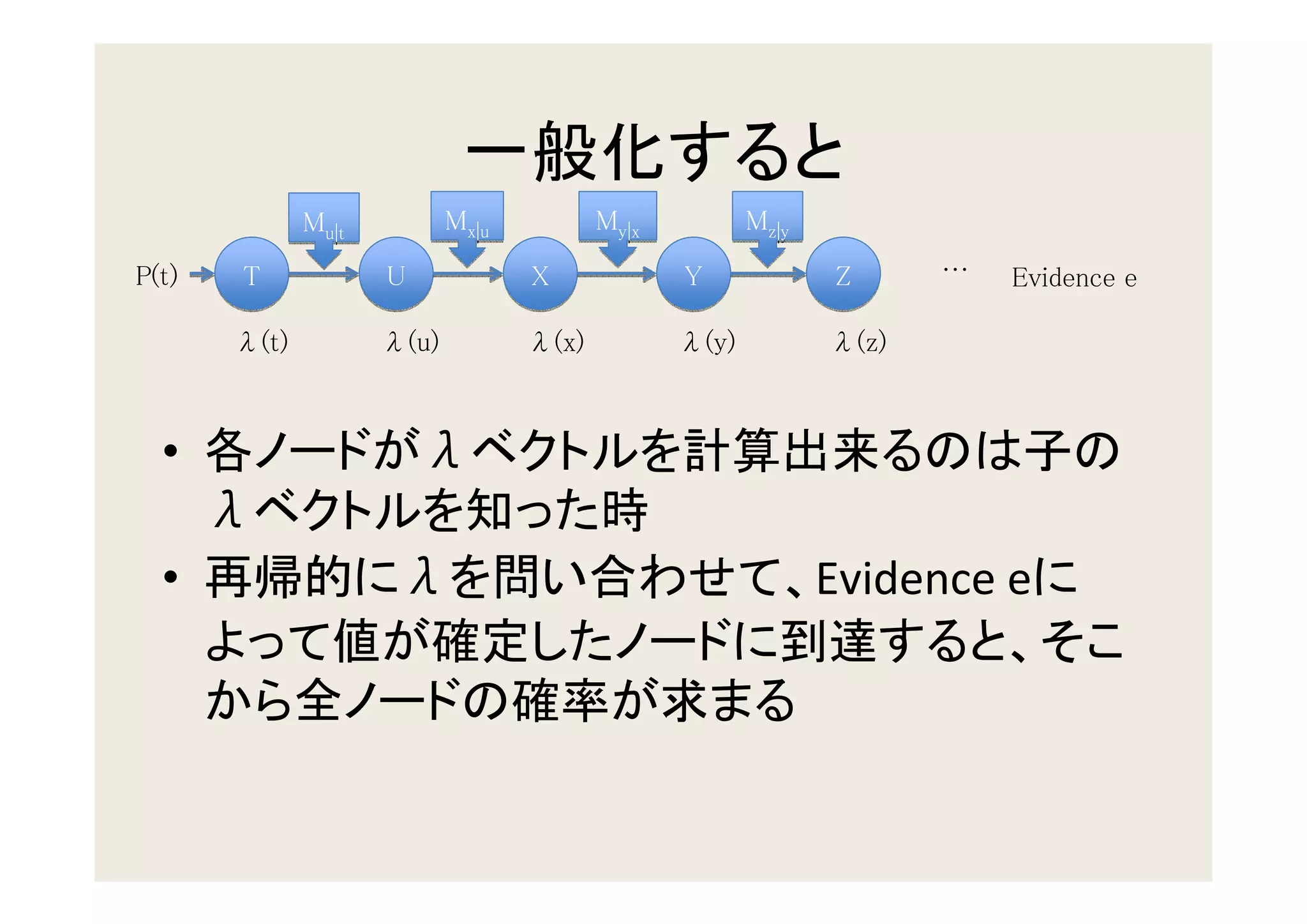
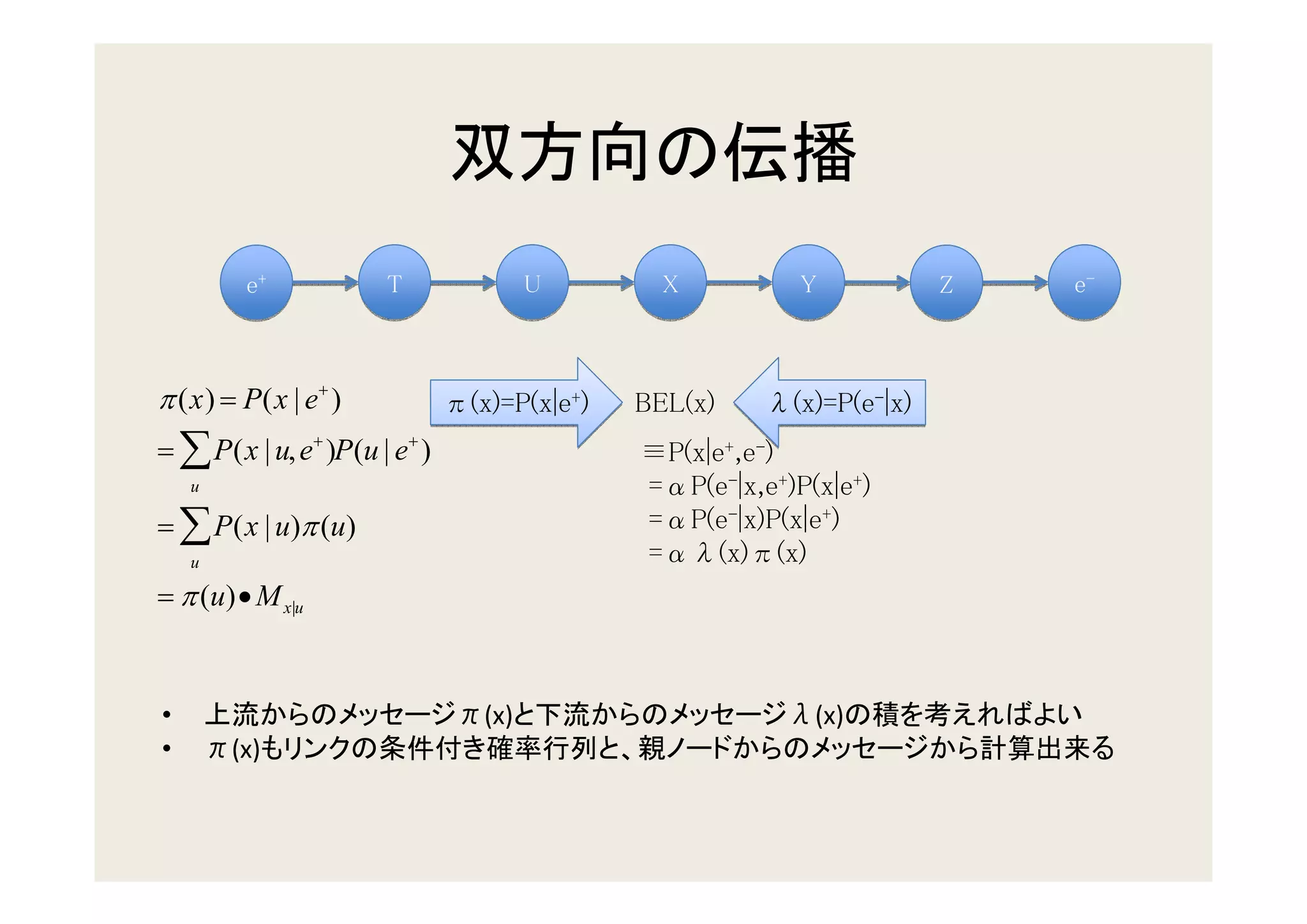
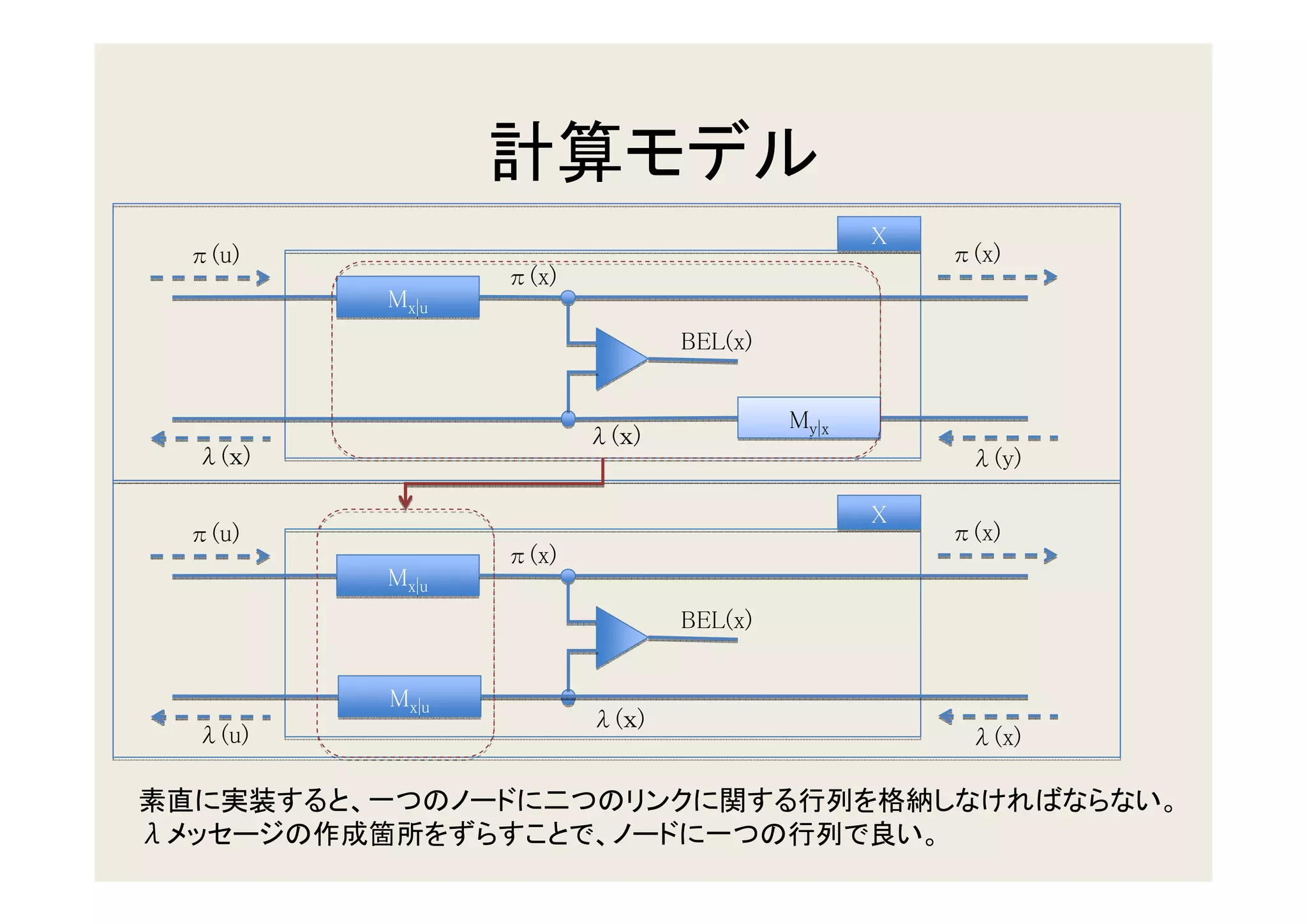
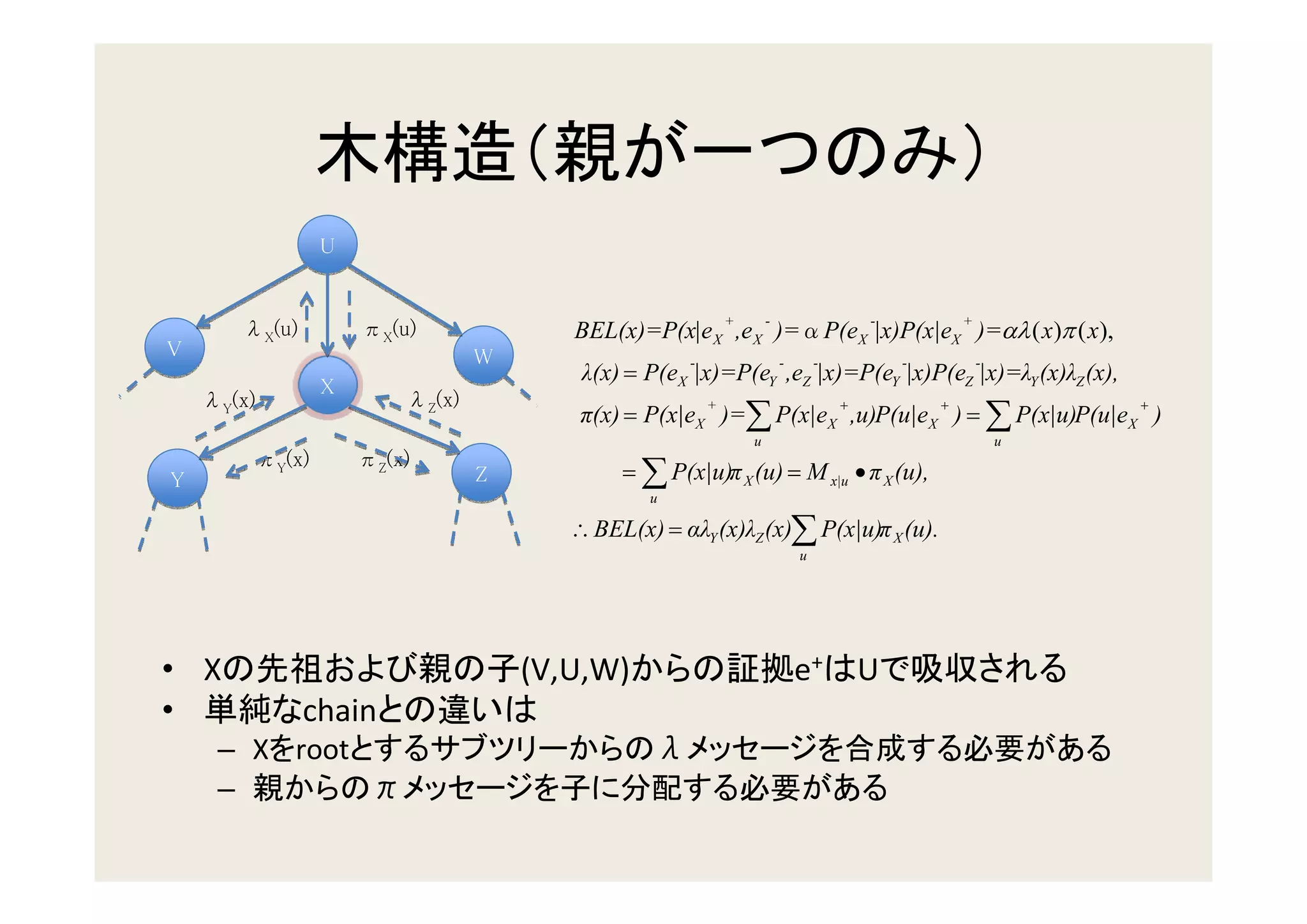
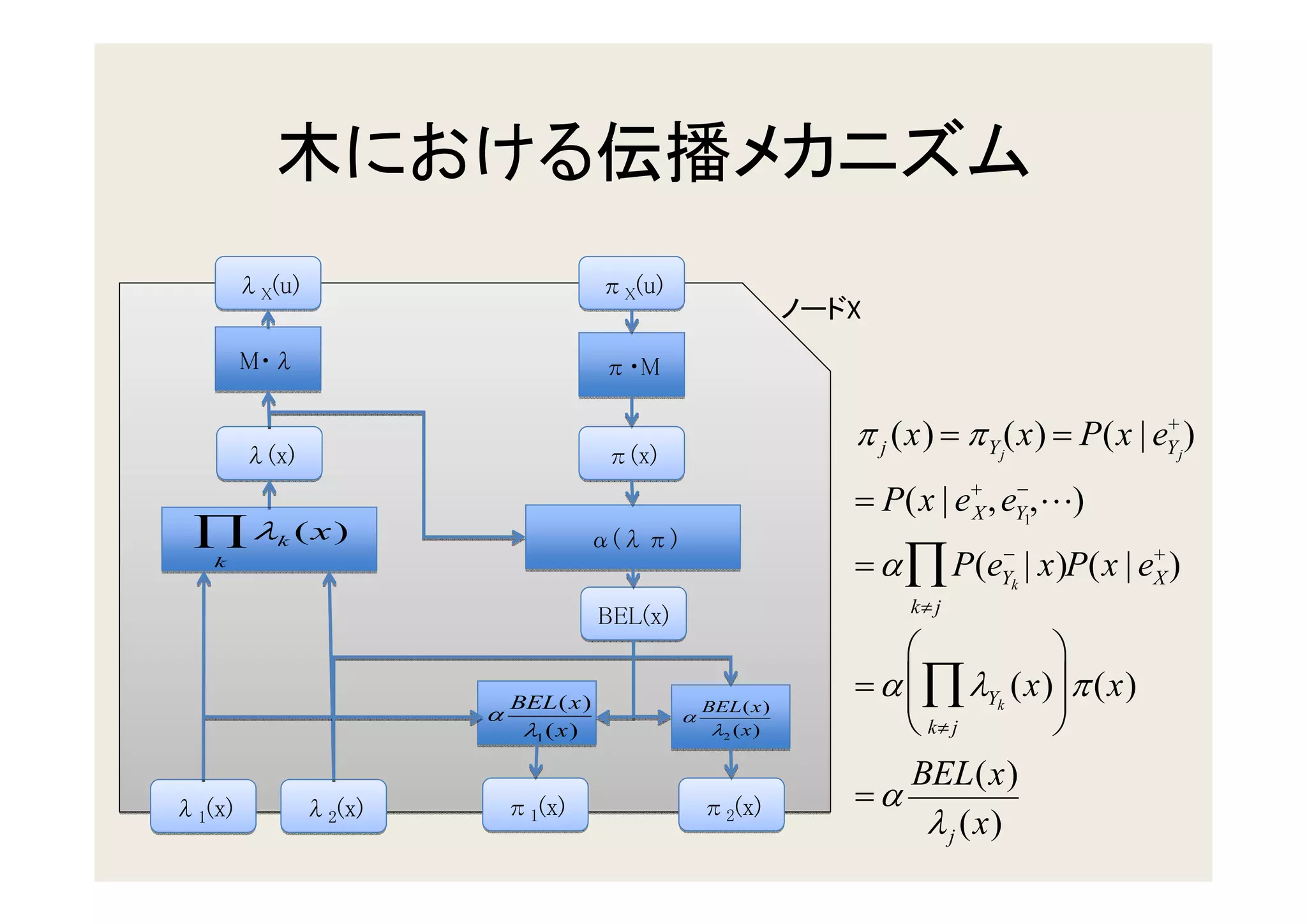
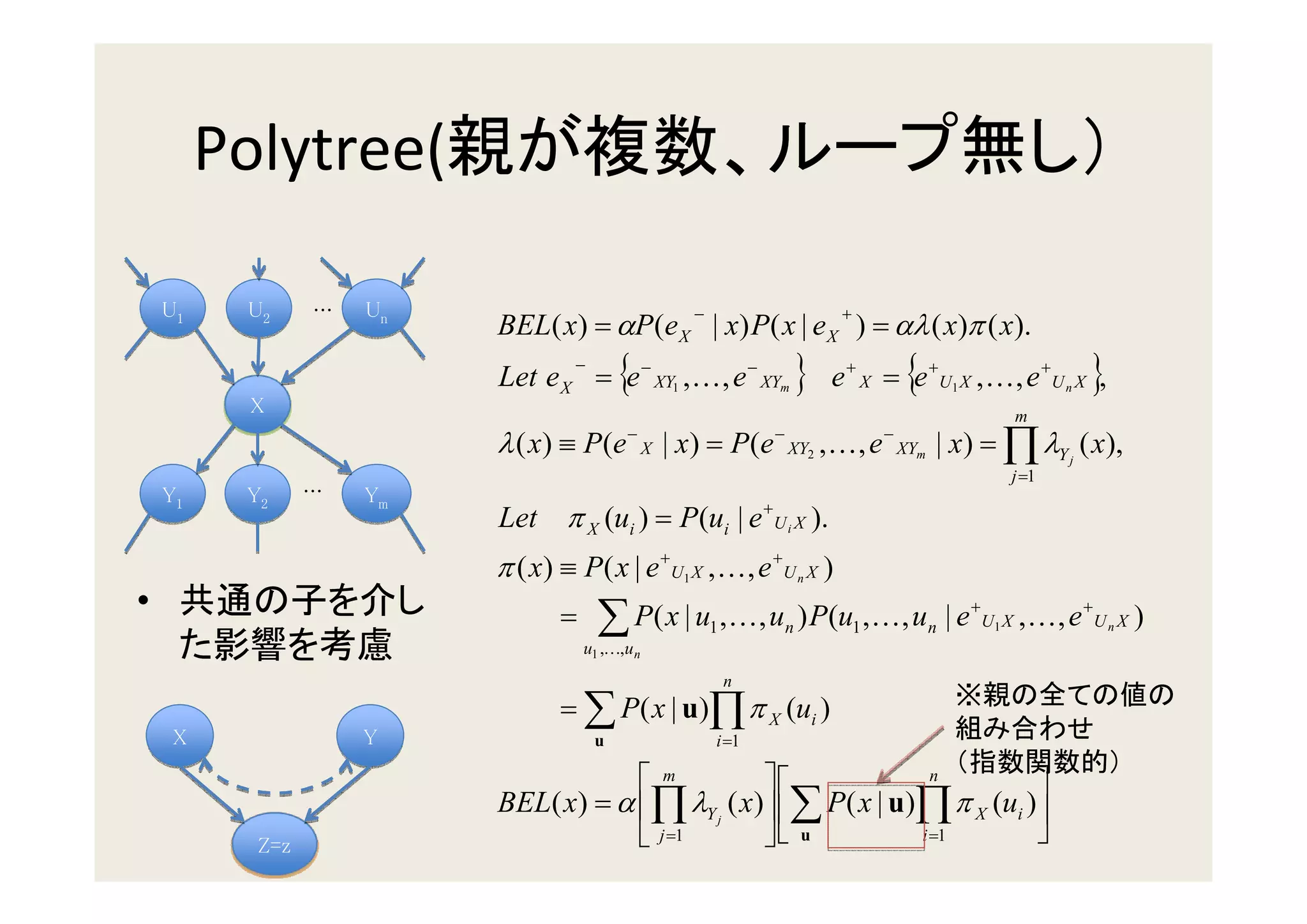
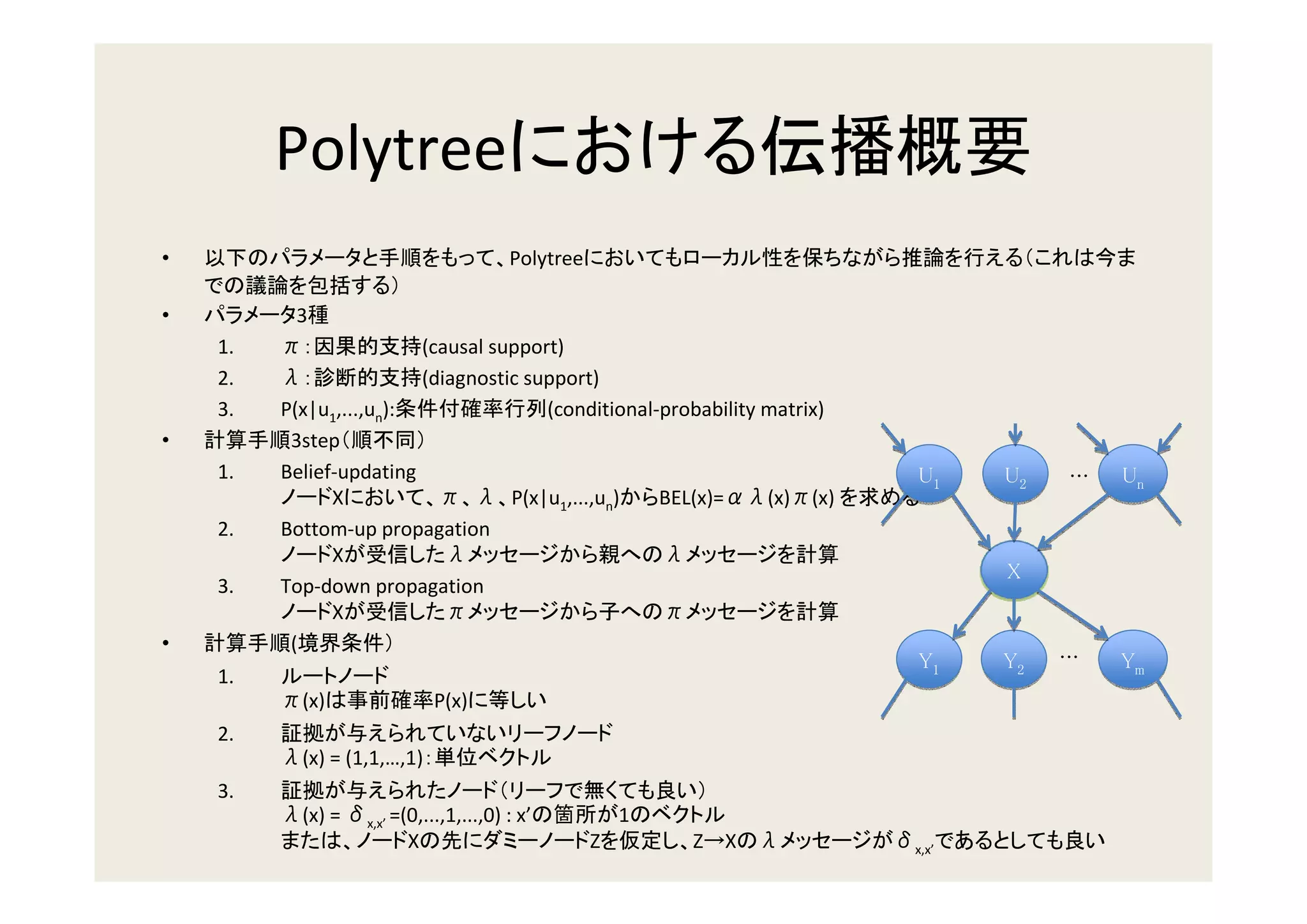
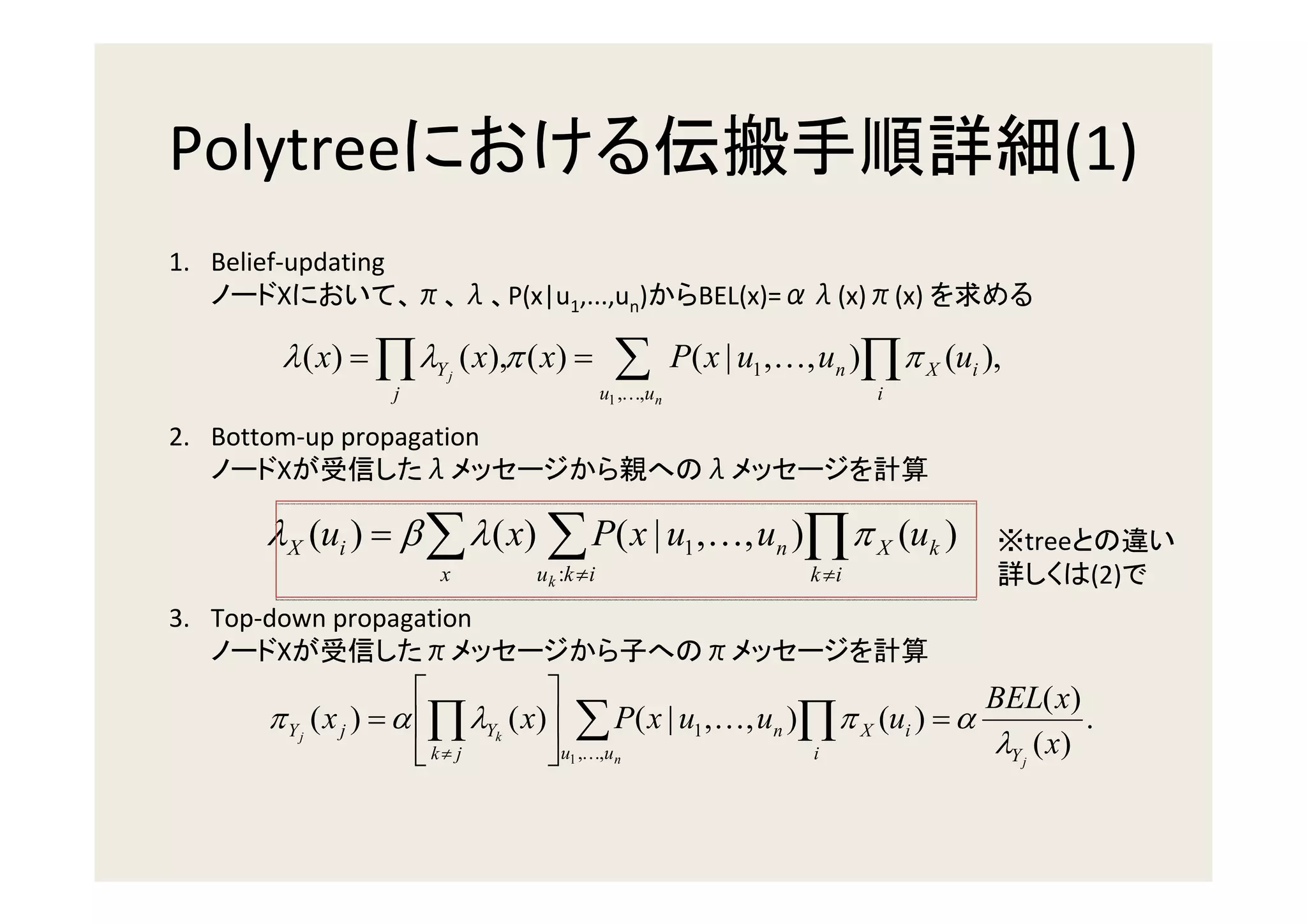
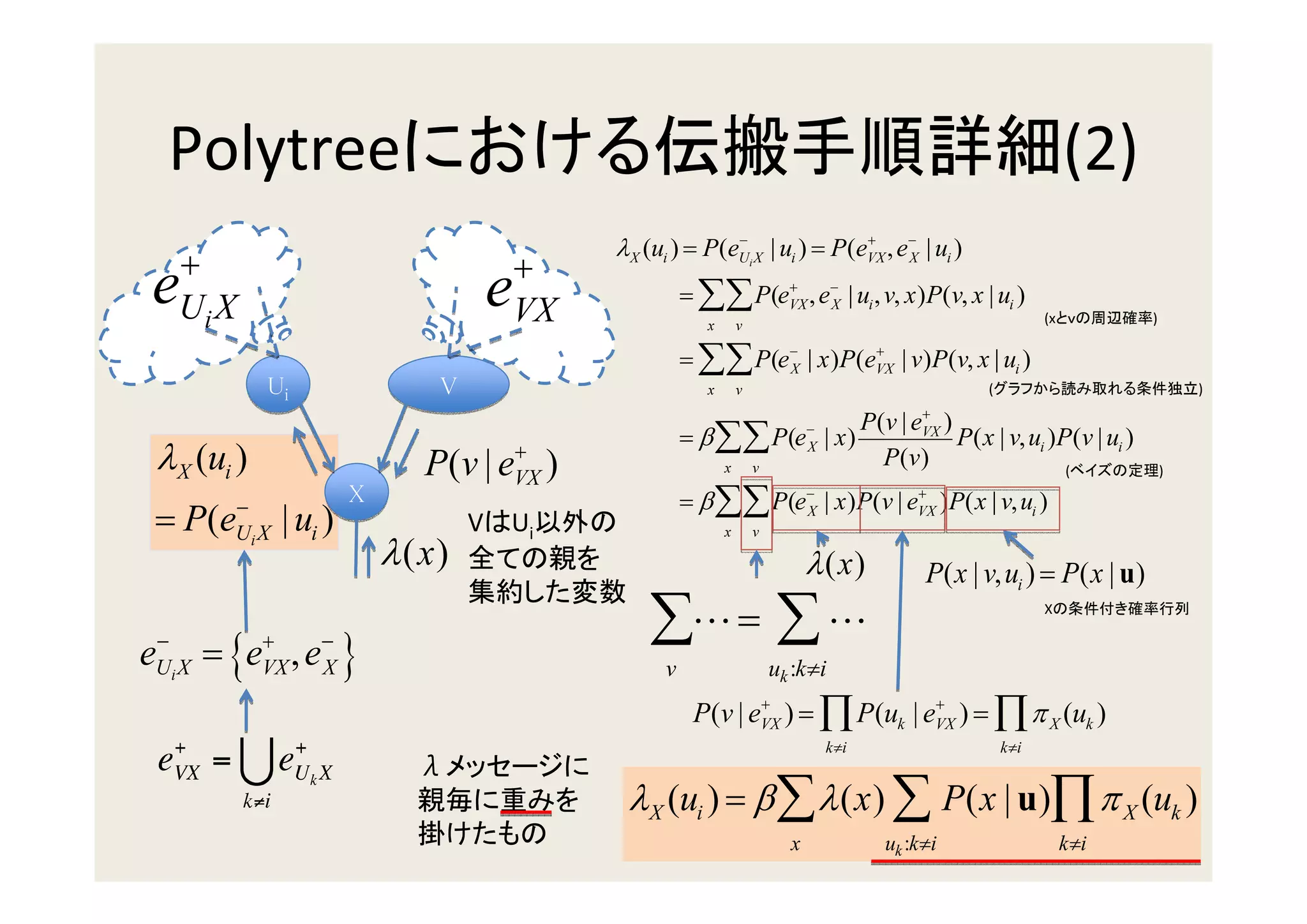
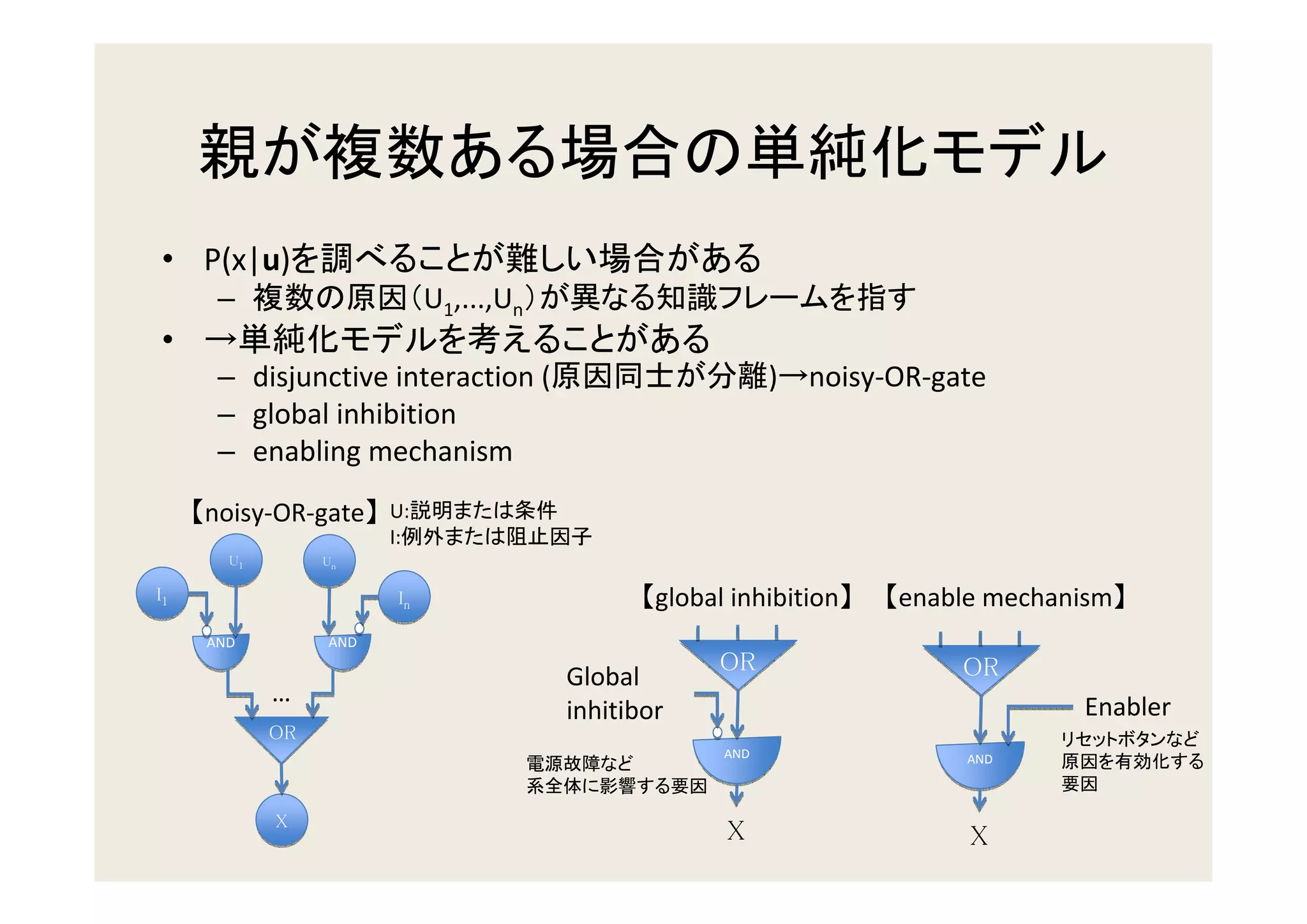

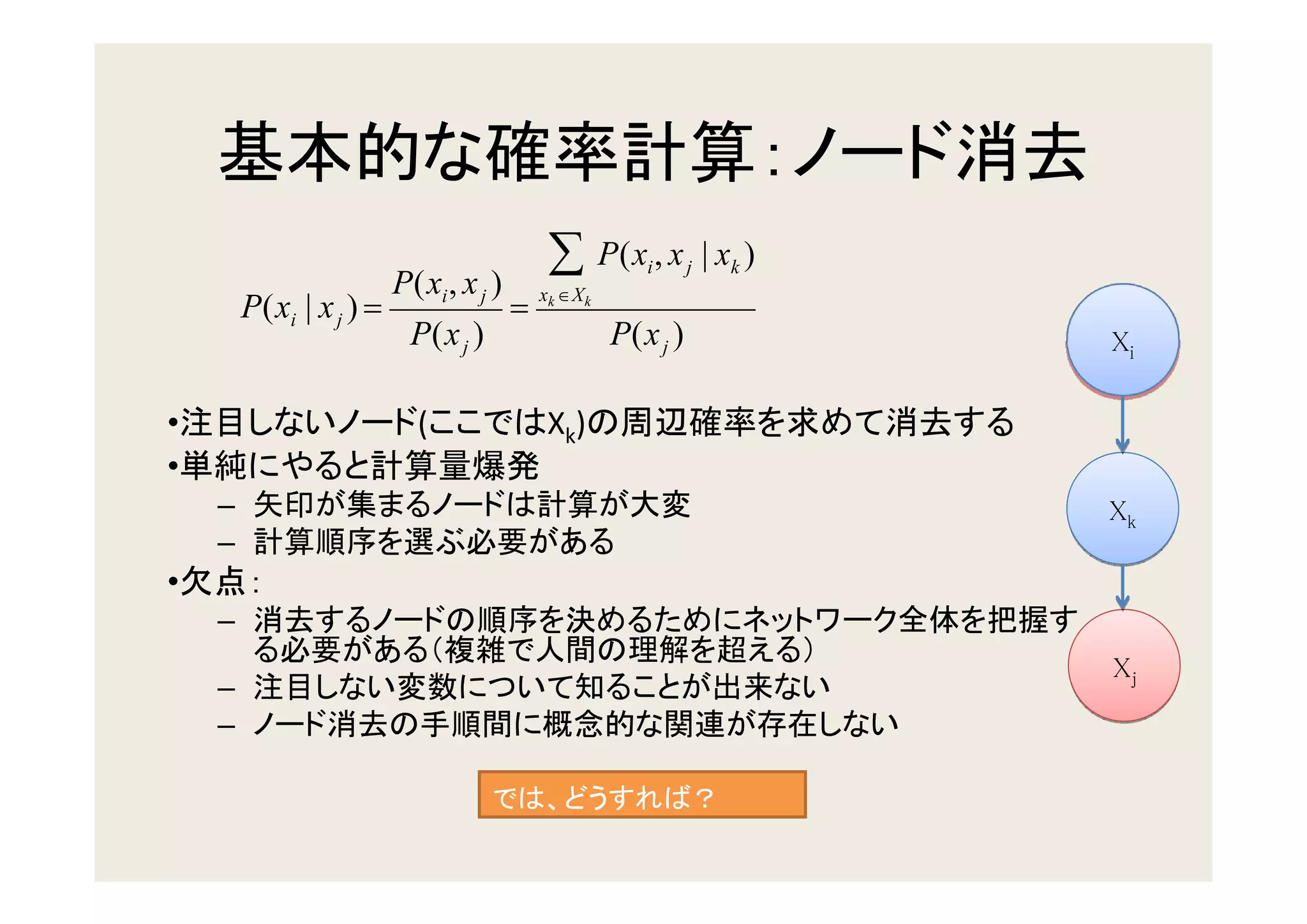
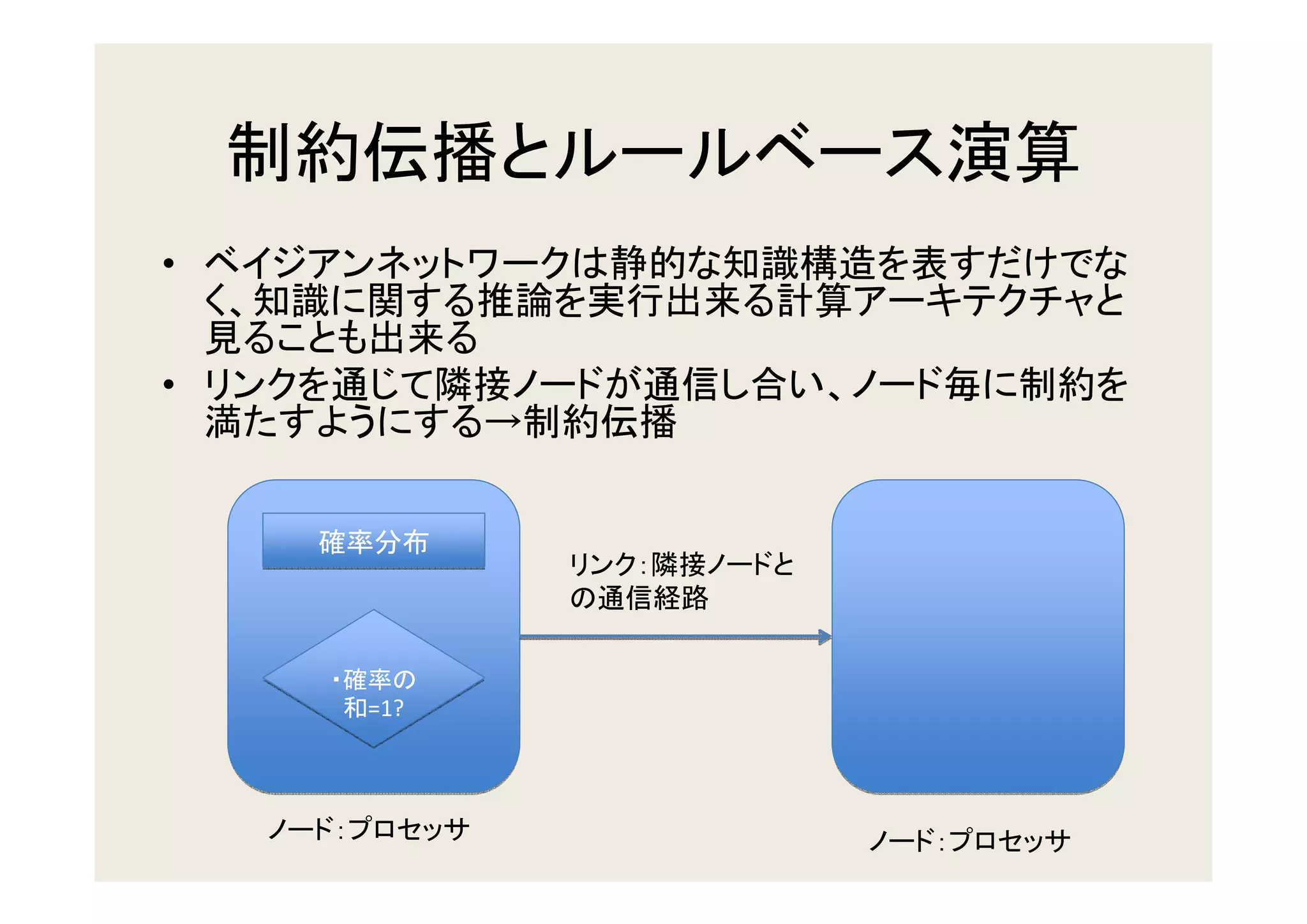
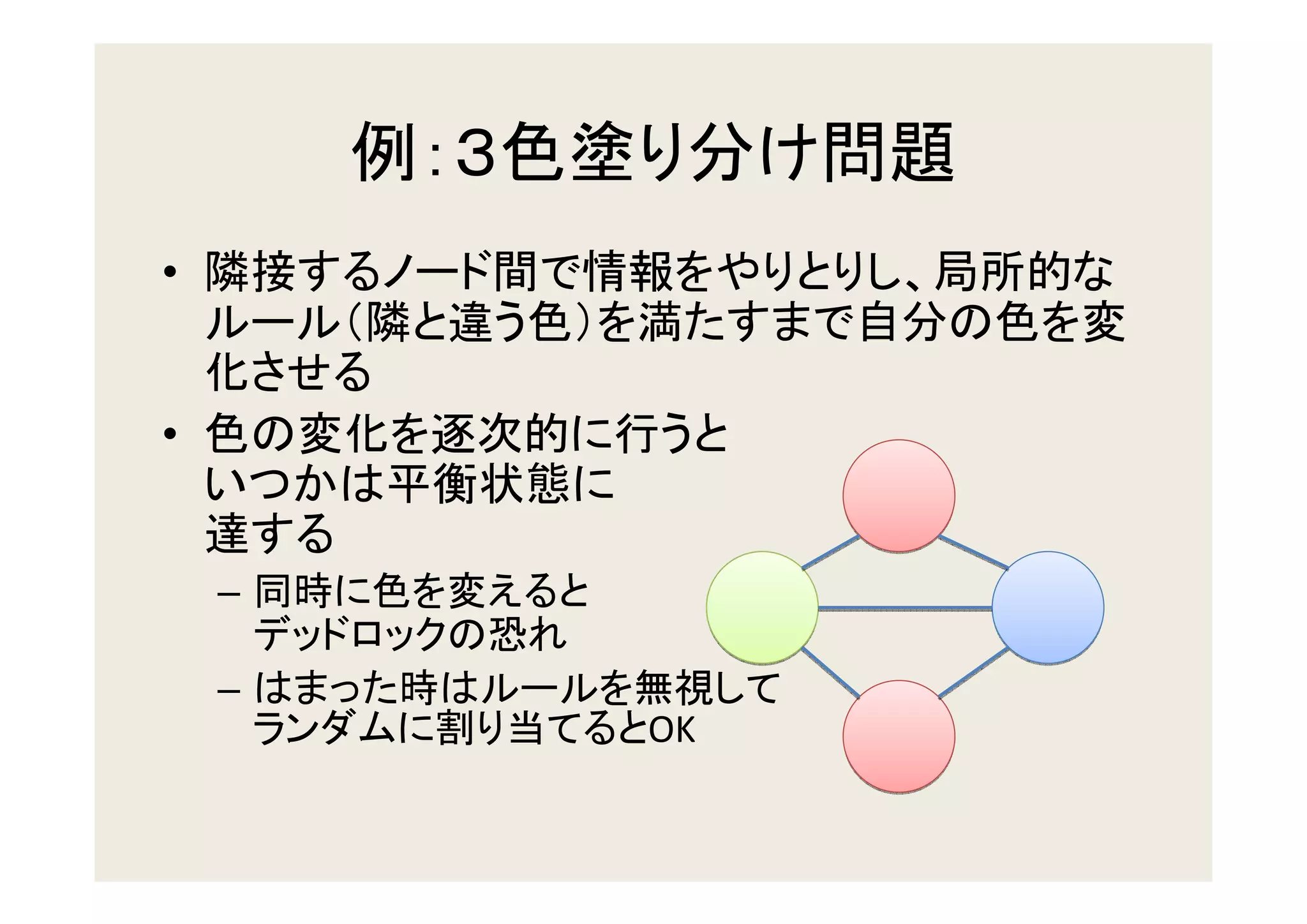
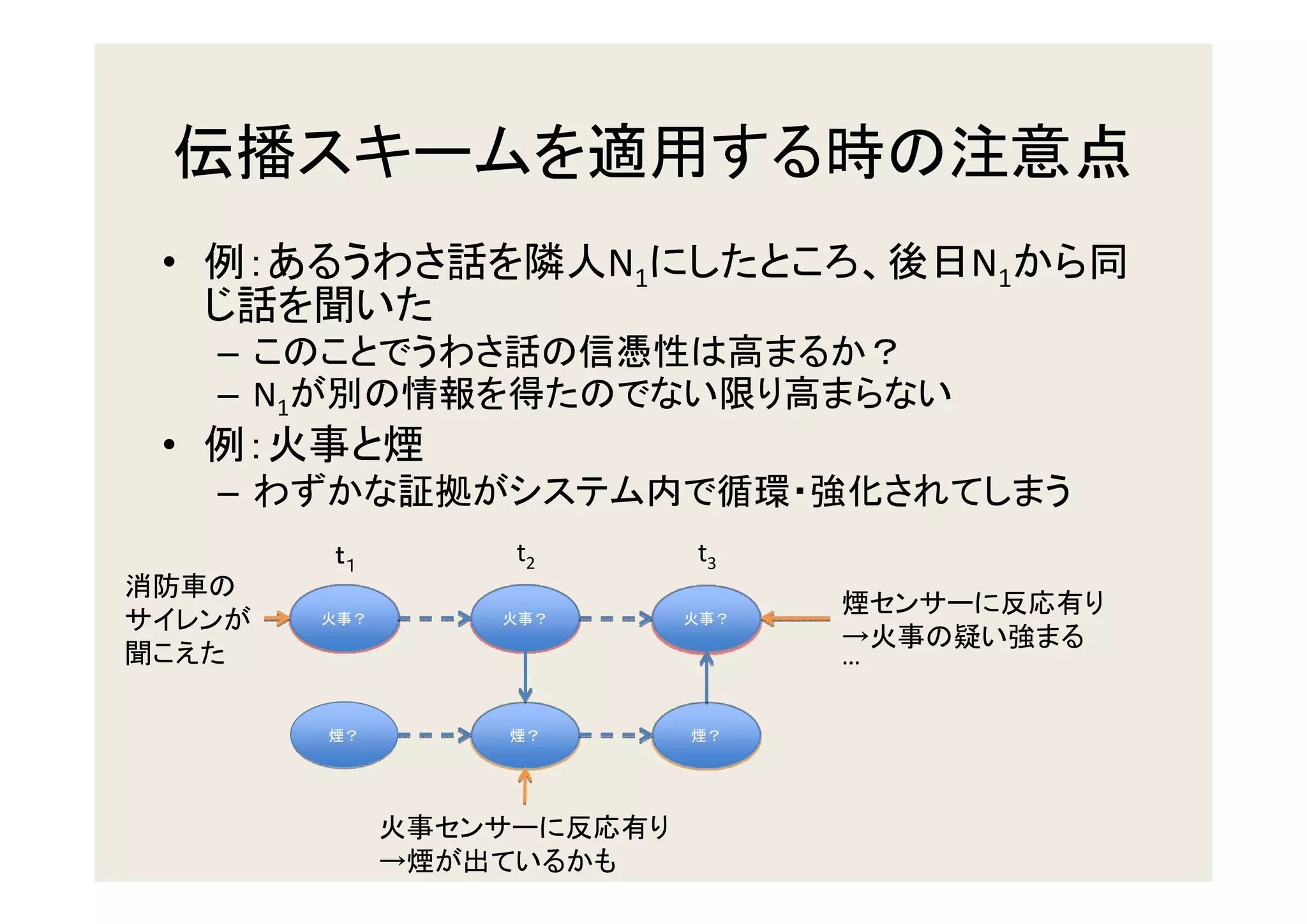
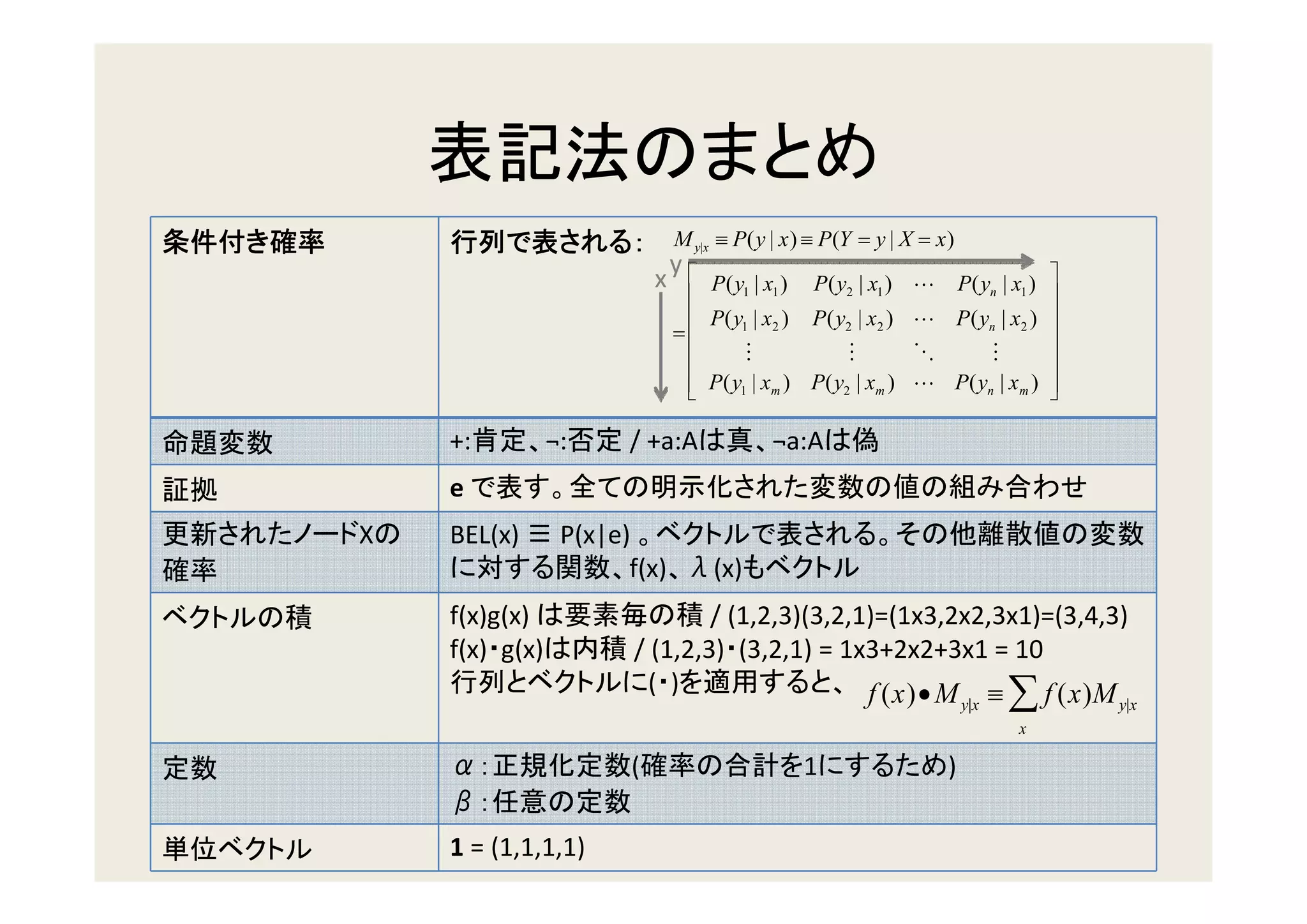
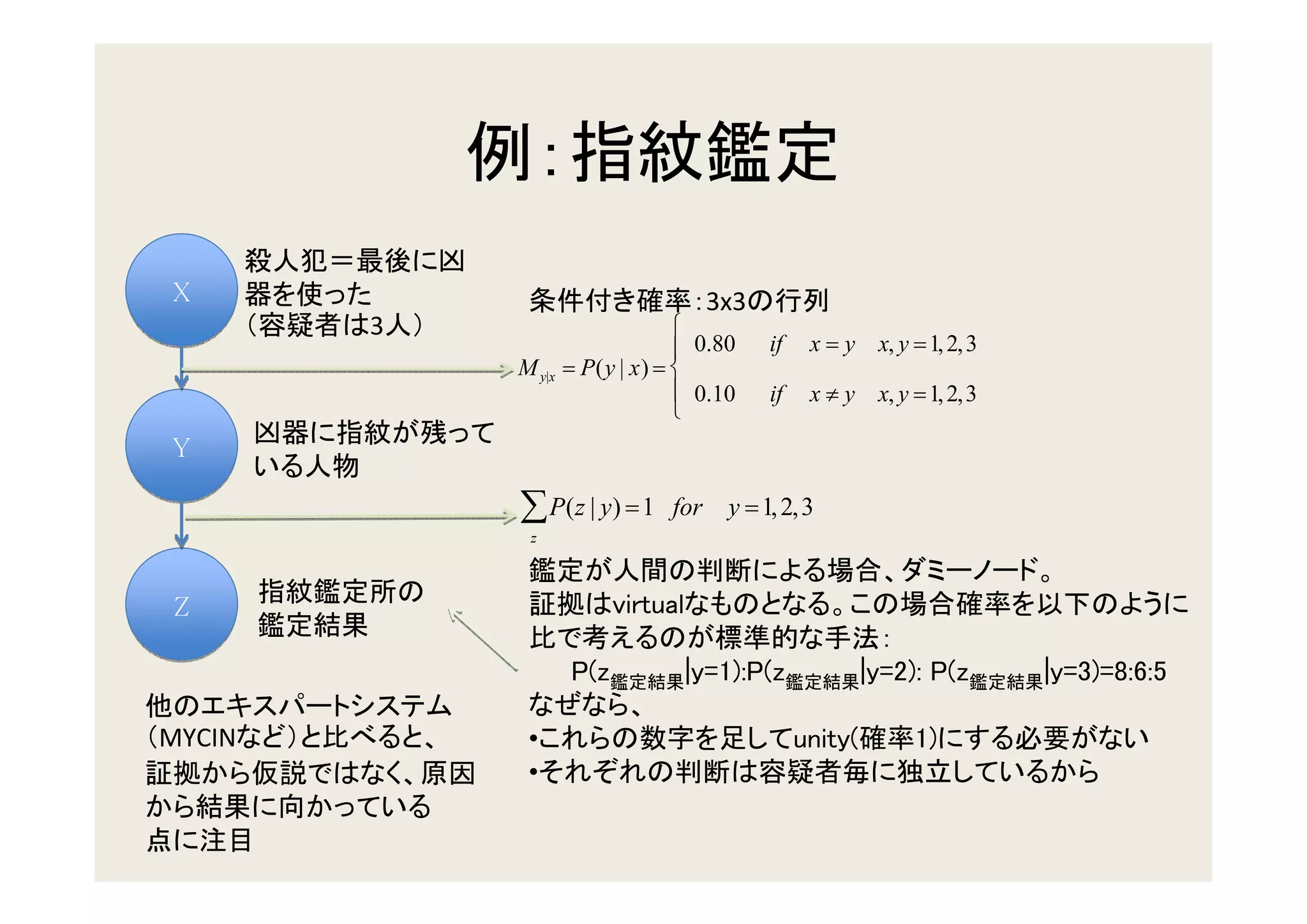
The document discusses probabilistic reasoning in intelligent systems using Bayesian networks. It covers the following topics: 1. Updating beliefs in a network by propagating probabilities between connected nodes using conditional probability tables. 2. Computing the posterior probability at a node given evidence elsewhere in the network by multiplying the prior at the node by the likelihood of the evidence. 3. Updating beliefs in chains, trees, and polytrees by propagating probabilities along the edges of the graph structure.