Download to read offline
![Minimum impulse effect
Minimum impulse effect: thrusters cannot produce arbitrarily small
torques, thus uk is constrained in
U = [−umax, −umin] ∪ {0} ∪ [umin, umax]
We introduce the binary vectors δ− and δ+ so that3
δ−
(k) = [u(k) ≤ −umin],
δ+
(k) = [u(k) ≥ umin],
and the auxiliary variable ηk defined as4
ηi(k) = [δ−
i (k) ∨ δ+
i (k)] · ui(k)
3
Symbols ≤ and ≥ are element-wise comparison operators.
4
Here ηi(k) stands for the i-th component of vector η(k) at time k.
6 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-9-2048.jpg)
![Minimum impulse effect
To detect thruster actuation we use the variable
v(k) = [δ−
(k) ∨ δ+
(k)]
and we recast the system dynamics as
z(k + 1) = Az(k) + Bη(k) + f,
γ(k + 1) = γ(k) + [ 1 1 ] v(k),
where γ(k) is the total actuation count up to time k on which we impose:
γ(k) ≤ γmax.
7 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-10-2048.jpg)
![Hybrid MPC - problem formulation
MPC problem formulation:
min
πN
V (πN ; x0, γ0)
s.t. x(0) = x0, γ(0) = γ0,
Hybrid dynamics, for k ∈ N[0,Nu−1],
δ±
(k) = 0, for k ∈ N[Nu,N−1],
9 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-13-2048.jpg)
![Barbecue mode
2 4 6 8 10 12 14 16 18 20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
time [s]
Rollrateerror[deg]
Absolute value of tracking error on ω
x
Figure : ωx converges fast to its set-point.
10 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-15-2048.jpg)
![Pointing Accuracy
−4 −3 −2 −1 0 1 2
−6
−5
−4
−3
−2
−1
0
1
2
pitch error [deg]
yawerror[deg]
Tracking error on pitch and yaw
PD
LQ
HMPC
Figure : HMPC achieves higher pointing accuracy compared to optimally tuned
PD and LQR controllers (which do not account for the MI effect).
11 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-16-2048.jpg)
![Actuation Count
50 100 150 200 250 300
−200
−100
0
100
200
LQRTorque[Nm]
50 100 150 200 250 300
−200
−100
0
100
200
PDTorque[Nm]
50 100 150 200 250 300
−4000
−2000
0
2000
HMPCTorque[Nm]
Time [s]
50 100 150 200 250 300
0
200
400
600
LQRTorque[Nm]
50 100 150 200 250 300
−200
−100
0
100
200
PDTorque[Nm]
50 100 150 200 250 300
−5000
0
5000
HMPCTorque[Nm]
Time [s]
Figure : HMPC achieves a significantly lower actuation count. Left: ωy, Right:
ωz.
12 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-17-2048.jpg)
![...with additive disturbances
−12 −10 −8 −6 −4 −2 0 2 4 6
−4
−2
0
2
4
6
8
10
12
14
pitch error [deg]
yawerror[deg]
Tracking error on pitch and yaw
Tsim
=500
PD
LQ
HMPC
Figure : Simulations in presence of a constant additive disturbance on uk of
6Nm.
13 / 15](https://image.slidesharecdn.com/hmpcupperstage-150724144346-lva1-app6891/75/HMPC-for-Upper-Stage-Attitude-Control-18-2048.jpg)
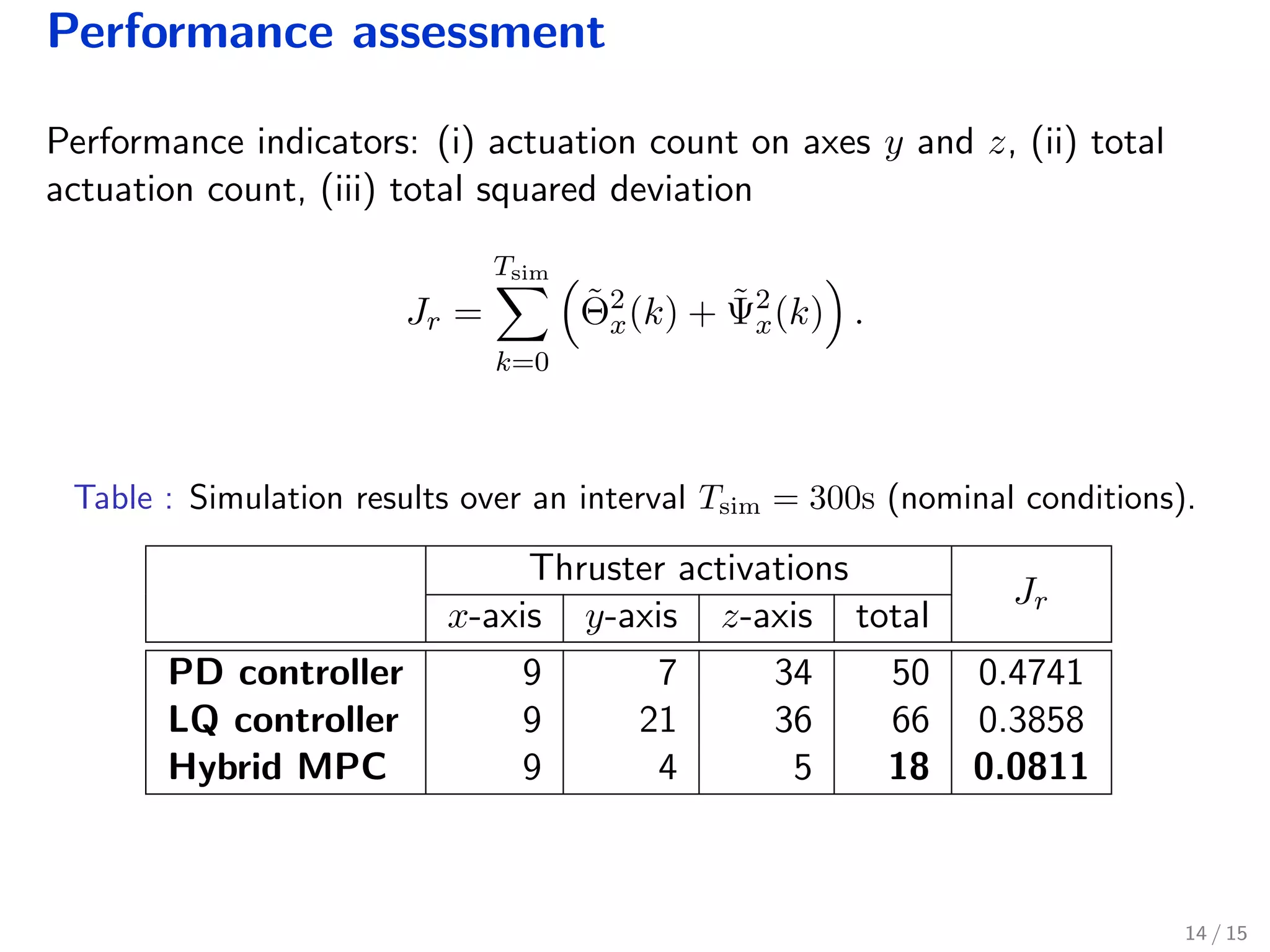
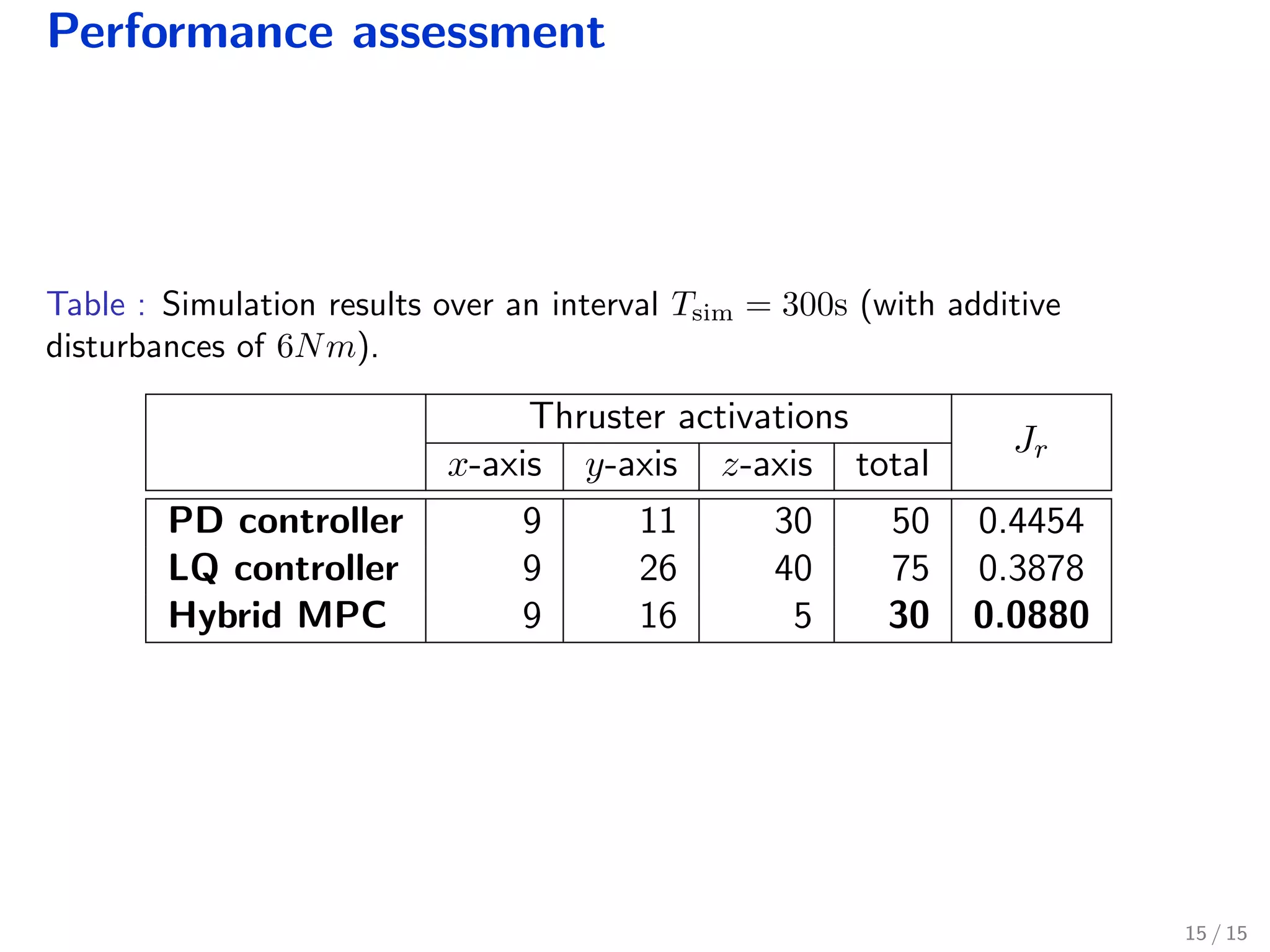


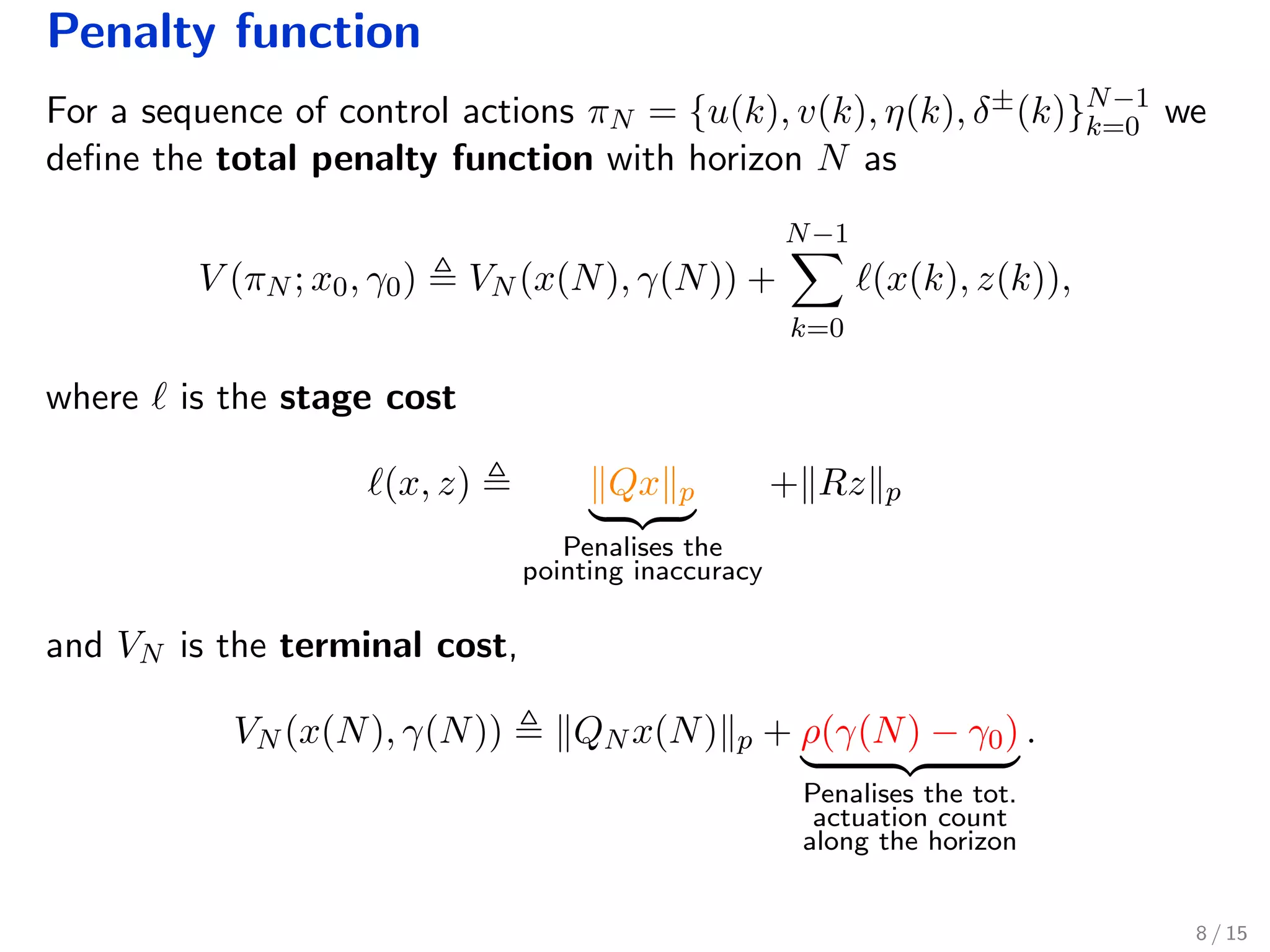
This document describes a hybrid model predictive control approach for attitude control of spacecraft using impulsive thrusters. The approach models the spacecraft dynamics and minimum impulse effects of the thrusters. It formulates the control problem as minimizing a cost function over future inputs while satisfying the hybrid dynamics and constraints, such as a limit on total thruster actuations. Simulations show the hybrid MPC achieves higher pointing accuracy, lower thruster usage, and better disturbance rejection compared to traditional PD and LQR controllers.