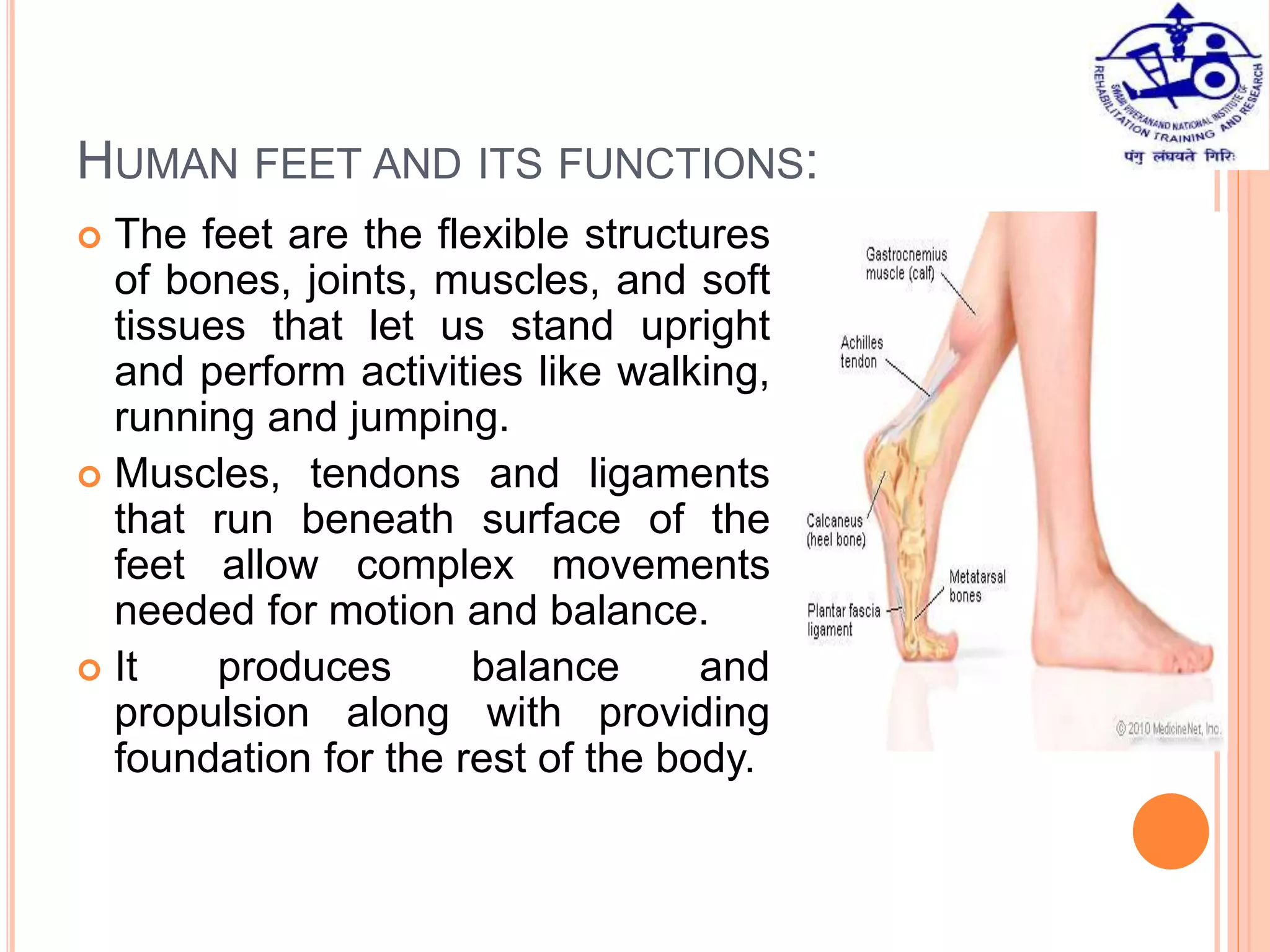
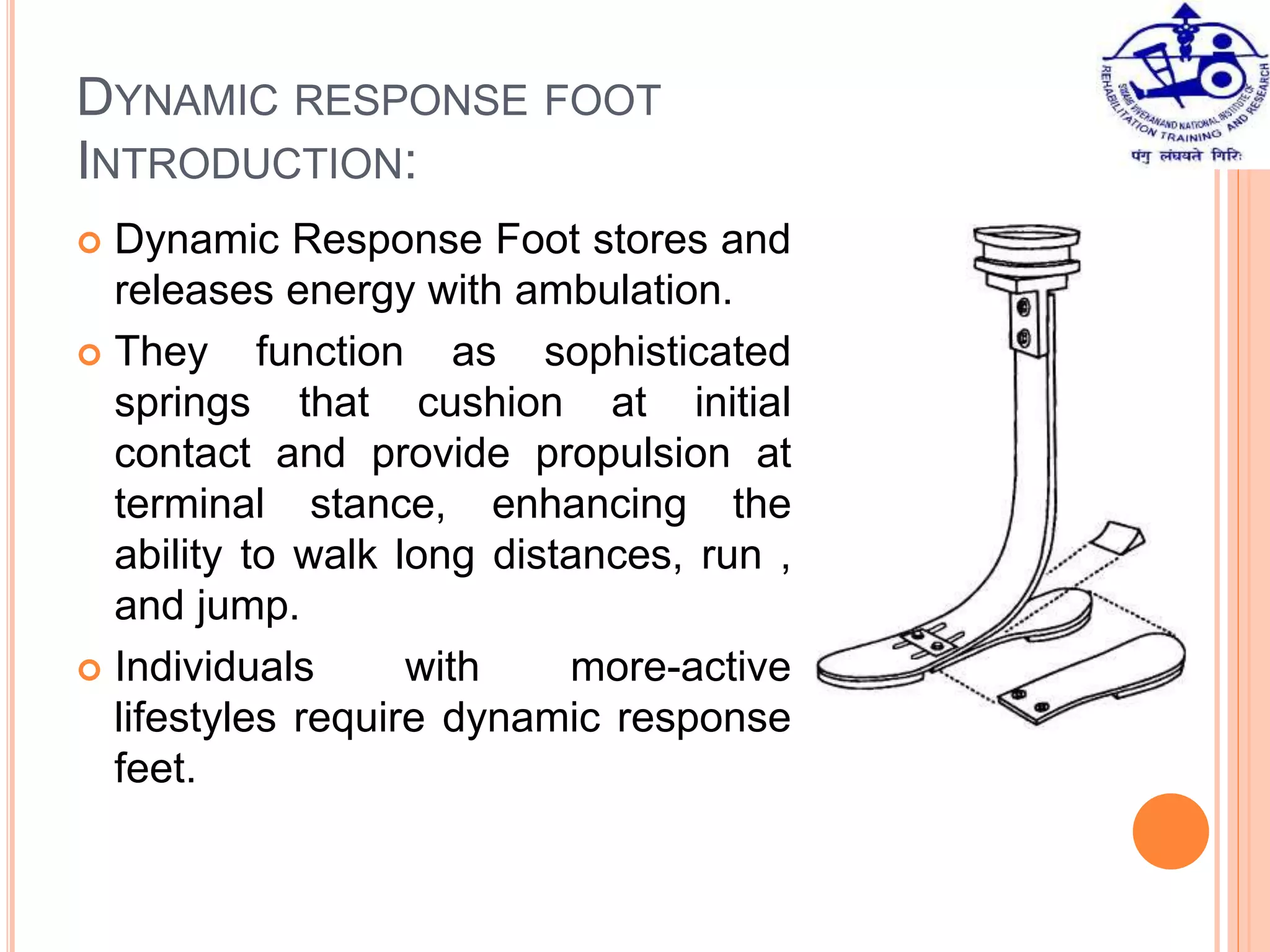
The document discusses dynamic response feet (DRF), which are prosthetic feet that store and release energy during walking to provide a more natural gait. It begins by describing the anatomy and function of human feet. It then discusses the history and development of DRFs since their introduction in 1984. The document outlines various DRF designs and classifications, including early models like Flex Foot and more advanced designs. It also examines the structural and functional mechanisms of DRFs and factors considered in selecting a DRF.
















































































![STUDY OF PROSTHETIC FEET AND SHOE MODIFICATIONS[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/studyofprostheticfeetandshoemodifications1-250827091252-86c8aa38-thumbnail.jpg?width=640&height=640&fit=bounds)
























