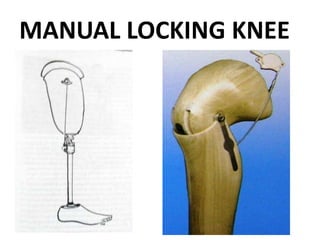
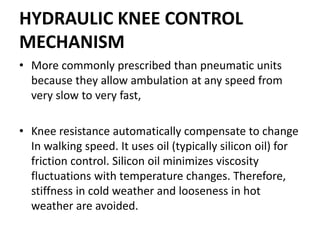
The document discusses prosthetic knee joints, classifying them based on axis type and control mechanisms. It describes single-axis knees that provide stability but lack swing phase control and polycentric multi-axis knees that more closely mimic natural knee motion. Control mechanisms include manual and automatic locking, hydraulic/pneumatic resistance, and microprocessor units that sense gait to adjust resistance for different surfaces.