Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Daiki Maekawa
13,770 views
ROS JAPAN Users Group Meetup 04
Software
◦
Read more
5
Save
Share
Embed
Embed presentation
Download
Downloaded 59 times
1
/ 20
2
/ 20
3
/ 20
4
/ 20
5
/ 20
6
/ 20
7
/ 20
8
/ 20
9
/ 20
10
/ 20
11
/ 20
12
/ 20
13
/ 20
14
/ 20
15
/ 20
16
/ 20
17
/ 20
18
/ 20
19
/ 20
20
/ 20
More Related Content
PDF
i-Cart miniを対象としたつくばチャレンジ用ソフトウェアパッケージの開発
by
Daiki Maekawa
PDF
ROS JAPAN Users Group Meetup 03
by
Daiki Maekawa
PDF
Moveitを使ったアプリケーションの紹介
by
Ryodo Tanaka
PPTX
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
Unity道場 ロボティクス 秋のLT祭り 2021
by
Ryo Kabutan
PDF
やってみようAWS IoT (ROS Japan UG #44 LT大会)
by
Seiya Shimizu
PDF
【Unity道場 建築スペシャル2】BIMの“I”の使い方
by
UnityTechnologiesJapan002
i-Cart miniを対象としたつくばチャレンジ用ソフトウェアパッケージの開発
by
Daiki Maekawa
ROS JAPAN Users Group Meetup 03
by
Daiki Maekawa
Moveitを使ったアプリケーションの紹介
by
Ryodo Tanaka
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
Unity道場 ロボティクス 秋のLT祭り 2021
by
Ryo Kabutan
やってみようAWS IoT (ROS Japan UG #44 LT大会)
by
Seiya Shimizu
【Unity道場 建築スペシャル2】BIMの“I”の使い方
by
UnityTechnologiesJapan002
What's hot
PDF
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
PDF
myCobotがある生活
by
Ryo Kabutan
PDF
20211006 ROSJP LT大会 中国のROS企業やコミュニティ
by
Nico-Tech Shenzhen/ニコ技深圳コミュニティ
PPTX
第4回瀬戸内ROS勉強会LT資料
by
NaotakaKawata
PPTX
ROSを用いた歩行ロボットの脚の開発
by
ShomaUehara
PDF
WRS トンネルチャレンジ 現地からリポートしてみる
by
Ryodo Tanaka
PPTX
roslaunch test + industrial_ci
by
Ryodo Tanaka
PDF
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
PDF
X ai meetup
by
ru pic
PDF
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
PPTX
xAI Meetup のご紹介
by
ru pic
PDF
ROS体験コース
by
NEDOROBOMARC
PDF
Techman ros package
by
KoheiMoriguchi
PDF
Unity x 自動運転シミュレーション、自動運転におけるGame Engineの役割
by
Tier_IV
PDF
もう一度Kotlinの話をしよう #ndsmeetup4
by
Yukiya Nakagawa
PDF
SwiftでAndroidアプリ書けるってよ
by
Syo Ikeda
PDF
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
by
Toshihiko Yamakami
PDF
Xcode and iTC submission topics
by
Syo Ikeda
PDF
Android Lintを覚えてベテラン開発者に追いつこう #ndsmeetup
by
Yukiya Nakagawa
PDF
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
myCobotがある生活
by
Ryo Kabutan
20211006 ROSJP LT大会 中国のROS企業やコミュニティ
by
Nico-Tech Shenzhen/ニコ技深圳コミュニティ
第4回瀬戸内ROS勉強会LT資料
by
NaotakaKawata
ROSを用いた歩行ロボットの脚の開発
by
ShomaUehara
WRS トンネルチャレンジ 現地からリポートしてみる
by
Ryodo Tanaka
roslaunch test + industrial_ci
by
Ryodo Tanaka
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
X ai meetup
by
ru pic
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
xAI Meetup のご紹介
by
ru pic
ROS体験コース
by
NEDOROBOMARC
Techman ros package
by
KoheiMoriguchi
Unity x 自動運転シミュレーション、自動運転におけるGame Engineの役割
by
Tier_IV
もう一度Kotlinの話をしよう #ndsmeetup4
by
Yukiya Nakagawa
SwiftでAndroidアプリ書けるってよ
by
Syo Ikeda
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
by
Toshihiko Yamakami
Xcode and iTC submission topics
by
Syo Ikeda
Android Lintを覚えてベテラン開発者に追いつこう #ndsmeetup
by
Yukiya Nakagawa
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
Viewers also liked
PPTX
Robo universe seoul 2016 mooreland presentation
by
Rising Media, Inc.
PDF
How to write a winning resume and cover letter: Stand out by telling your story
by
Idealist Careers
DOCX
Sample job motivation letter
by
Judith Indu
PDF
A privacy preserving framework for managing mobile ad requests and billing in...
by
LeMeniz Infotech
PDF
Propaganda and censorship hadrien
by
mdrouet44
PDF
A novel pwm high voltage conversion ratio bi directional three-phase dcdc con...
by
LeMeniz Infotech
PPTX
Imp
by
Yaireko
PPTX
Blogger did you know!
by
JustyC
PPTX
Trekking in kerala
by
Kerala Honeymoon Packages
PDF
Konsepsi dasar msdm
by
YulLiieya SetiieyaApparatzetthu
PPTX
June 1 announcements
by
Earl Oswalt
PDF
A cascade point of load dc dc converter with a novel phase shifted switched c...
by
LeMeniz Infotech
PDF
Nonisolated high step up dc–dc converters adopting switched-capacitor cell
by
LeMeniz Infotech
PPTX
Forgather
by
Nicola Nauwynck
PPTX
Software
by
dabuone
PDF
Vmbuddies coordinating live migration of multi tier applications in cloud env...
by
LeMeniz Infotech
PDF
Riverside Resources Corporate Presentation
by
mhallaran
PPTX
Love Blue Owl SEO
by
Xianfei Li
PDF
From Economic Brand Value to Holonomic Brand Value
by
Holonomics
Robo universe seoul 2016 mooreland presentation
by
Rising Media, Inc.
How to write a winning resume and cover letter: Stand out by telling your story
by
Idealist Careers
Sample job motivation letter
by
Judith Indu
A privacy preserving framework for managing mobile ad requests and billing in...
by
LeMeniz Infotech
Propaganda and censorship hadrien
by
mdrouet44
A novel pwm high voltage conversion ratio bi directional three-phase dcdc con...
by
LeMeniz Infotech
Imp
by
Yaireko
Blogger did you know!
by
JustyC
Trekking in kerala
by
Kerala Honeymoon Packages
Konsepsi dasar msdm
by
YulLiieya SetiieyaApparatzetthu
June 1 announcements
by
Earl Oswalt
A cascade point of load dc dc converter with a novel phase shifted switched c...
by
LeMeniz Infotech
Nonisolated high step up dc–dc converters adopting switched-capacitor cell
by
LeMeniz Infotech
Forgather
by
Nicola Nauwynck
Software
by
dabuone
Vmbuddies coordinating live migration of multi tier applications in cloud env...
by
LeMeniz Infotech
Riverside Resources Corporate Presentation
by
mhallaran
Love Blue Owl SEO
by
Xianfei Li
From Economic Brand Value to Holonomic Brand Value
by
Holonomics
Similar to ROS JAPAN Users Group Meetup 04
PDF
ROSによる今後のロボティクスのあり方
by
Mori Ken
PPTX
20180421_CV勉強会_LT
by
sumisumith
PPTX
ROScon 2017 参加報告
by
Yutaro ISHIDA
PDF
ROS JAPAN Users Group Meetup 01
by
Daiki Maekawa
PDF
TurtleBotで遊んでみた
by
naoyuki_iot
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
ロボットマニピュレーションの作業・動作計画 / rosjp_planning_for_robotic_manipulation_20240521
by
Fukuoka Institute of Technology
PPTX
ディープラーニングとROSで作る自動運転ロボット
by
Hiroaki Kaneda
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
PDF
Robotpaper.Challenge 2019-08
by
robotpaperchallenge
PDF
ROSでロボット開発中
by
ssuser2144b2
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
ROS2講習会の報告 (瀬戸内ROS勉強会#02にて)
by
Hirokazu Onomichi
PDF
UnityとROSの連携について
by
UnityTechnologiesJapan002
PDF
IROS2020 survey
by
robotpaperchallenge
ODP
オープンキャンパススライド2017
by
robo_lab
PDF
2013 summercamp 05
by
openrtm
PDF
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
ROSによる今後のロボティクスのあり方
by
Mori Ken
20180421_CV勉強会_LT
by
sumisumith
ROScon 2017 参加報告
by
Yutaro ISHIDA
ROS JAPAN Users Group Meetup 01
by
Daiki Maekawa
TurtleBotで遊んでみた
by
naoyuki_iot
オープンソース SLAM の分類
by
Yoshitaka HARA
ロボットマニピュレーションの作業・動作計画 / rosjp_planning_for_robotic_manipulation_20240521
by
Fukuoka Institute of Technology
ディープラーニングとROSで作る自動運転ロボット
by
Hiroaki Kaneda
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
Robotpaper.Challenge 2019-08
by
robotpaperchallenge
ROSでロボット開発中
by
ssuser2144b2
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
ROS2講習会の報告 (瀬戸内ROS勉強会#02にて)
by
Hirokazu Onomichi
UnityとROSの連携について
by
UnityTechnologiesJapan002
IROS2020 survey
by
robotpaperchallenge
オープンキャンパススライド2017
by
robo_lab
2013 summercamp 05
by
openrtm
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
ROS JAPAN Users Group Meetup 04
1.
第四回ROS勉強会 in カワダロボティクス
2014年11月8日 千葉工業大学 工学部 4年 ロボット設計・制御研究室 前川大輝
2.
自己紹介 千葉工業大学のロボカップ開発チーム「CITBrains」
のリーダー 教育用マイコンボードの開発プロジェクトのリーダー – ソフトウェアのライブラリ開発(2011年 ~ 2012年) 農場用メータの自動読み取り技術を企業と共同開発 – (2013年11月 ~ 2014年8月) 今年からつくばチャレンジの開発に参加 この勉強会を含む、OSSの活動
3.
前回までの内容 任意の手先位置・姿勢へのプランニング
自己干渉回避
4.
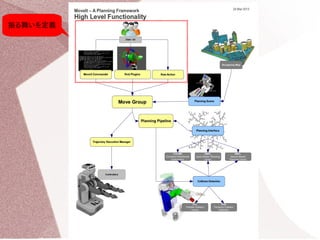
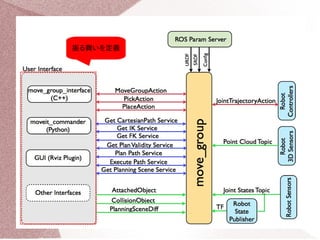
振る舞いを定義
5.
振る舞いを定義
6.
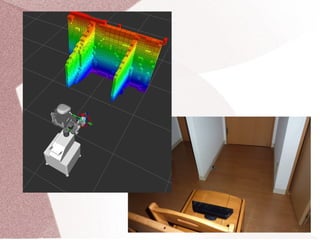
MoveIt! + ロボットの認識
今回からNEXTAGEのステレオカメラが使用可能 障害物の自動回避等をやらせたい – ポイントクラウドの利用
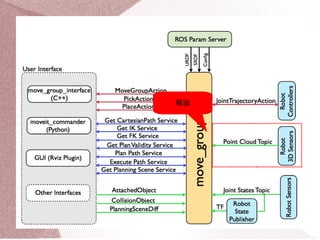
7.
解説
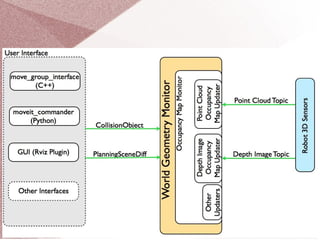
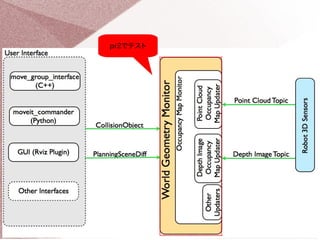
8.
3D Perception
Occupancy Map Updaterが占有格子地図を更新 入力に応じてプラグインを選択 – PointCloudOctomapUpdater ● sensor_msgs/PointCloud2 – DepthImageOctomapUpdater ● sensor_msgs/Image
10.
pr2でテスト
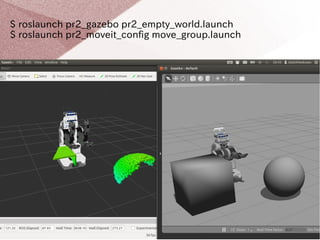
11.
$ roslaunch pr2_gazebo
pr2_empty_world.launch $ roslaunch pr2_moveit_config move_group.launch
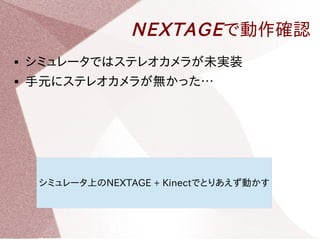
12.
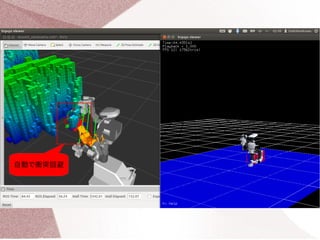
NEXTAGEで動作確認 シミュレータではステレオカメラが未実装
手元にステレオカメラが無かった… シミュレータ上のNEXTAGE + Kinectでとりあえず動かす
13.
以下のコマンドを入力 $ git
clone https://github.com/ros-japan-users/nextage_moveit_perception $ rtmlaunch nextage_ros_bridge nextage_ros_bridge_simulation.launch $ roslaunch nextage_moveit_perception moveit_planning_execution.launch
15.
自動で衝突回避
16.
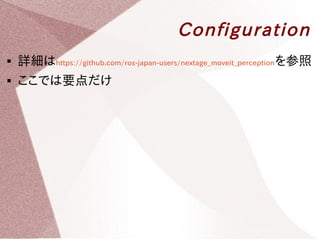
Configuration 詳細はhttps://github.com/ros-japan-users/nextage_moveit_perceptionを参照
ここでは要点だけ
17.
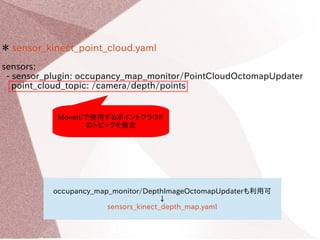
* sensor_kinect_point_cloud.yaml sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater point_cloud_topic: /camera/depth/points MoveIt!で使用するポイントクラウド のトピックを指定 occupancy_map_monitor/DepthImageOctomapUpdaterも利用可 ↓ sensors_kinect_depth_map.yaml
18.
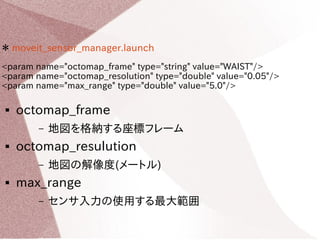
* moveit_sensor_manager.launch <param
name="octomap_frame" type="string" value="WAIST"/> <param name="octomap_resolution" type="double" value="0.05"/> <param name="max_range" type="double" value="5.0"/> octomap_frame – 地図を格納する座標フレーム octomap_resolution – 地図の解像度(メートル) max_range – センサ入力の使用する最大範囲
19.
最後に 外部環境を認識して障害物回避を行わせることが可能に
ステレオカメラの利用方法はこの後 @youtalk が解説
20.
ご清聴ありがとうございました
Download