Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
UnityTechnologiesJapan002
PDF, PPTX
7,150 views
UnityとROSの連携について
安価なマニピュレータとして有名になりつつあるmyCobotを使いながら、UnityとROSの連携方法について説明します。Unityと実機が動くデモを示しながら、苦労した点など共有したいと思います。
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 14
2
/ 14
3
/ 14
4
/ 14
5
/ 14
6
/ 14
Most read
7
/ 14
Most read
8
/ 14
Most read
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
PDF
tf,tf2完全理解
by
Koji Terada
オープンソース SLAM の分類
by
Yoshitaka HARA
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
SLAM開発における課題と対策の一例の紹介
by
miyanegi
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
tf,tf2完全理解
by
Koji Terada
What's hot
PDF
ガイデットフィルタとその周辺
by
Norishige Fukushima
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
PDF
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
PDF
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
PDF
SSII2019企画: 点群深層学習の研究動向
by
SSII
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PPTX
ORB-SLAMの手法解説
by
Masaya Kaneko
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
PPTX
3次元計測とフィルタリング
by
Norishige Fukushima
ガイデットフィルタとその周辺
by
Norishige Fukushima
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
SSII2019企画: 点群深層学習の研究動向
by
SSII
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
ORB-SLAMの手法解説
by
Masaya Kaneko
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
3次元計測とフィルタリング
by
Norishige Fukushima
Similar to UnityとROSの連携について
PDF
ROSによる今後のロボティクスのあり方
by
Mori Ken
PDF
リンク機構を有するロボットをGazeboで動かす
by
tomohiro kuwano
PDF
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
PDF
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
by
Toshihiko Yamakami
PPTX
ディープラーニングとROSで作る自動運転ロボット
by
Hiroaki Kaneda
PDF
STMとROSをシリアル通信させて移動ロボットを作る
by
mozyanari
PDF
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
PPTX
ROSチュートリアル ROBOMECH2018
by
Ryuichi Ueda
PDF
ARとUnity-Robotics-Hubの連携
by
UnityTechnologiesJapan002
PPTX
ROS Gazebo unityを使ったロボット開発入門( Japanese )
by
terugdev
PDF
ROS JAPAN Users Group Meetup 04
by
Daiki Maekawa
PDF
ROS体験コース
by
NEDOROBOMARC
PDF
Ros#を使ったROSとxRデバイスの通信
by
mozyanari
PDF
TurtleBotで遊んでみた
by
naoyuki_iot
PPTX
ロボットシステム学2015年第12回
by
Ryuichi Ueda
PDF
IoT with Unity
by
Saitou Yuta
PPTX
20180421_CV勉強会_LT
by
sumisumith
PDF
ROS体験コース
by
NEDOROBOMARC
PPTX
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
PDF
DYNAMIXEL ROS Package
by
Yoonseok Pyo
ROSによる今後のロボティクスのあり方
by
Mori Ken
リンク機構を有するロボットをGazeboで動かす
by
tomohiro kuwano
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
by
Toshihiko Yamakami
ディープラーニングとROSで作る自動運転ロボット
by
Hiroaki Kaneda
STMとROSをシリアル通信させて移動ロボットを作る
by
mozyanari
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
ROSチュートリアル ROBOMECH2018
by
Ryuichi Ueda
ARとUnity-Robotics-Hubの連携
by
UnityTechnologiesJapan002
ROS Gazebo unityを使ったロボット開発入門( Japanese )
by
terugdev
ROS JAPAN Users Group Meetup 04
by
Daiki Maekawa
ROS体験コース
by
NEDOROBOMARC
Ros#を使ったROSとxRデバイスの通信
by
mozyanari
TurtleBotで遊んでみた
by
naoyuki_iot
ロボットシステム学2015年第12回
by
Ryuichi Ueda
IoT with Unity
by
Saitou Yuta
20180421_CV勉強会_LT
by
sumisumith
ROS体験コース
by
NEDOROBOMARC
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
DYNAMIXEL ROS Package
by
Yoonseok Pyo
More from UnityTechnologiesJapan002
PDF
産業用ロボット開発におけるUnityの活用
by
UnityTechnologiesJapan002
PDF
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
PDF
Unityでロボットの教師データは作れる!
by
UnityTechnologiesJapan002
PDF
5分でわかる Sensor SDK
by
UnityTechnologiesJapan002
PDF
【Unity道場 自動車編】 リアルタイム3D技術が支えるデジタルツイン
by
UnityTechnologiesJapan002
PDF
Unityでお手軽ロボット開発「toio SDK for Unity」最新事例
by
UnityTechnologiesJapan002
PDF
BIMからはじまる異世界転生 ~Unity Reflect が叶える新しい建築の世界~
by
UnityTechnologiesJapan002
PDF
5分でわかる Unity点群
by
UnityTechnologiesJapan002
PDF
【Unity道場 自動車編】トヨタのxR活用で進める現場DXへの挑戦 ~UnityとHoloLens 2を用いて~
by
UnityTechnologiesJapan002
PDF
【Unity道場 自動車編】HMIにおけるUnity活用事例
by
UnityTechnologiesJapan002
PPTX
【Unity道場 自動車編】空間再現ディスプレイの概要と活用事例
by
UnityTechnologiesJapan002
PDF
集まれ!Dreamingエンジニア! 〜箱庭で紡ぎ出されるIoT/クラウドロボティクス開発の新しいカタチ〜
by
UnityTechnologiesJapan002
PPTX
【Unity道場 自動車編】モビリティへの活用に向けて
by
UnityTechnologiesJapan002
PDF
【Unity道場 教育編】さまざまに広がるUnityの世界 2021
by
UnityTechnologiesJapan002
PDF
5分でわかる Unity Forma
by
UnityTechnologiesJapan002
PDF
【Unity道場 自動車編】Unityで実現する産業向けxRソリューション
by
UnityTechnologiesJapan002
PDF
10分でわかる Unityコンピュータービジョン
by
UnityTechnologiesJapan002
PDF
【Unity道場 教育編】Unity が中等・高等教育の潜在的な可能性を解き放つ
by
UnityTechnologiesJapan002
PDF
中国深センから盛り上がる、ソフトウェアフレンドリーなロボティクス
by
UnityTechnologiesJapan002
PDF
5分でわかる Unity Reflect
by
UnityTechnologiesJapan002
産業用ロボット開発におけるUnityの活用
by
UnityTechnologiesJapan002
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
Unityでロボットの教師データは作れる!
by
UnityTechnologiesJapan002
5分でわかる Sensor SDK
by
UnityTechnologiesJapan002
【Unity道場 自動車編】 リアルタイム3D技術が支えるデジタルツイン
by
UnityTechnologiesJapan002
Unityでお手軽ロボット開発「toio SDK for Unity」最新事例
by
UnityTechnologiesJapan002
BIMからはじまる異世界転生 ~Unity Reflect が叶える新しい建築の世界~
by
UnityTechnologiesJapan002
5分でわかる Unity点群
by
UnityTechnologiesJapan002
【Unity道場 自動車編】トヨタのxR活用で進める現場DXへの挑戦 ~UnityとHoloLens 2を用いて~
by
UnityTechnologiesJapan002
【Unity道場 自動車編】HMIにおけるUnity活用事例
by
UnityTechnologiesJapan002
【Unity道場 自動車編】空間再現ディスプレイの概要と活用事例
by
UnityTechnologiesJapan002
集まれ!Dreamingエンジニア! 〜箱庭で紡ぎ出されるIoT/クラウドロボティクス開発の新しいカタチ〜
by
UnityTechnologiesJapan002
【Unity道場 自動車編】モビリティへの活用に向けて
by
UnityTechnologiesJapan002
【Unity道場 教育編】さまざまに広がるUnityの世界 2021
by
UnityTechnologiesJapan002
5分でわかる Unity Forma
by
UnityTechnologiesJapan002
【Unity道場 自動車編】Unityで実現する産業向けxRソリューション
by
UnityTechnologiesJapan002
10分でわかる Unityコンピュータービジョン
by
UnityTechnologiesJapan002
【Unity道場 教育編】Unity が中等・高等教育の潜在的な可能性を解き放つ
by
UnityTechnologiesJapan002
中国深センから盛り上がる、ソフトウェアフレンドリーなロボティクス
by
UnityTechnologiesJapan002
5分でわかる Unity Reflect
by
UnityTechnologiesJapan002
UnityとROSの連携について
1.
1 2021.10.19 Unity道場 ロボティクス 秋のLT祭り 2021 がある生活 UnityとROS接続編 株丹
亮 Kabutan Ryo
2.
株丹 亮 Kabutan Ryo 九州工業大学
西田研究室 - 2017 産業用ロボットのためのパスプランニングアルゴリズムの研究に従事。 株式会社 安川電機 2017 – 現在 株式会社 エイアイキューブ 出向中 個人で ROS (Robot Operating System) Japan Users Groupでたまに発表しています。 主にMoveItというロボットアーム向けライブラリの解説など。 産業用ロボットのためのプランニング技術、最適化、異常検知などの知能化技術の開発に従事。 2 今日はこの続編 上記資料のURL: https://www.slideshare.net/RyoKabutan
3.
今日のLTの内容 • ロボット開発ではシミュレータが必須。 • ROSを使ったロボット開発をする場合、Gazeboと呼ばれるシミュレータを 使う場合が多い。 •
しかしGazebo 11が最終バージョン(2025年まで)。Ignitionという新しい シミュレータに移行することになっているが、まだまだ発展途上。 日本での活用事例はあまり聞いたことがない。 3 • そこでUnityが活用できないか。myCobotを題材に説明。 NVIDIAとOpen Roboticsが連携 「Ignition Gazebo」「NVIDIA Isaac Sim」 の相互運用を目指し、ROSコミュニティのAI開発を強化 https://robotstart.info/2021/09/28/nvidia-open-robotics.html まだ何かありそう!これから楽しみ!! “
4.
ROS (MoveIt)を使ったら何ができる? • ロボットアームの経路を自動で作ることができる。 •
センサで障害物を検知しながら、複雑な障害物回避動作が生成できる。 (自動ピッキングシステム等のアプリが比較的簡単に作成できる。) 4 3次元距離センサ MoveItの画面 障害物 myCobot
5.
Bad! 前ページのデモからわかること 5 Good! myCobotの登場により自宅でも簡単にシステムが構築できるようになった。 • それでもロボットアーム8万円、3次元センサ3万円、合計11万円。 購入するには少し勇気が必要。 Unityを使って実物のmyCobotがなくても、 MoveItで遊べるような環境を作ることが今回の目標。 • 開発途中のソフトをそのまま実機で実験するのは、少し怖い。 思わぬ動きをして机や周りの物にぶつけてヒヤヒヤ。煙は出したくない。
6.
完成 実際に動作させた結果を紹介 実際にやってみたこと 6 STEP 3 MoveItの障害物情報をUnity上にも反映させる MoveItのplanning_sceneをUnityにpublishする。 Unity公式ツール「ROS-TCP Connector」使用。 STEP 2 ros_control経由でUnity上のmyCobotを動かす Unity用のインターフェースを作る。 Unity公式ツール「ROS-TCP
Connector」使用。 STEP 1 ロボットモデルをUnity上に登場させる URDFで定義したmyCobotをUnityにインポートする。 Unity公式ツール「URDF Importer」使用。
7.
ロボットモデルをUnity上に登場させる • ROSで使用されるロボット定義ファイル(URDF)を使って3D Objectを追加。 •
URDF Importerが問題なく使用できた。 7 Good! インポートするだけで、 各リンクごとにAirticulation Body を自動で定義してくれる。
8.
ros_control経由でUnity上のmyCobotを動かす ros_control? : ROSの制御用フレームワーク。簡単に言うと… この枠組でドライバを実装しておけば、どのロボットアームでも同じ司令で動作可能。 つまり実機用のドライバ、シミュレータ用のドライバと2つ用意しておけば、 それ以外の実装はそのまま共通で使うことができる 8 ①
インターフェースを継承する 実機 myCobotの場合 myCobotはシリアル通信で制御可能。 API公開もされているので、 これを活用すれば良い。 どのようにros_control対応のドライバを書けばよいか。 まず実機の例を示す。 ② ロボット制御のための実装をする 実機 myCobot用のクラス作成。 左のコメントアウト部分に シリアル通信の命令を実装する。 • readは現在の関節角度を取る命令。 • writeは任意の関節角度に動かす命令。 ここがUnityになればよい!
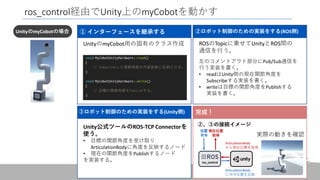
9.
ros_control経由でUnity上のmyCobotを動かす 9 ① インターフェースを継承する UnityのmyCobotの場合 ROSのTopicに乗せてUnityとROS間の 通信を行う。 ②ロボット制御のための実装をする(ROS側) UnityのmyCobot用の固有のクラス作成 左のコメントアウト部分にPub/Sub通信を 行う実装を書く。 • readはUnity側の現在関節角度を Subscribeする実装を書く。 •
writeは目標の関節角度をPublishする 実装を書く。 ③ロボット制御のための実装をする(Unity側) Unity公式ツールのROS-TCP Connectorを 使う。 • 目標の関節角度を受け取り ArticulationBodyに角度を反映するノード • 現在の関節角度をPublishするノード を実装する。 完成! 実際の動きを確認 現在位置 取得 ArticulationBody に司令位置を反映 位置 司令 ros_control ArticulationBody から現在位置を取得 ②、③の接続イメージ
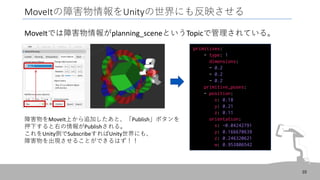
10.
MoveItの障害物情報をUnityの世界にも反映させる MoveItでは障害物情報がplanning_sceneというTopicで管理されている。 10 障害物をMoveIt上から追加したあと、「Publish」ボタンを 押下すると右の情報がPublishされる。 これをUnity側でSubscribeすればUnity世界にも、 障害物を出現させることができるはず!! primitives: - type: 1 dimensions: -
0.2 - 0.2 - 0.2 primitive_poses: - position: x: 0.18 y: 0.21 z: 0.11 orientation: x: -0.04242791 y: 0.166670639 z: 0.246320621 w: 0.953806542
11.
MoveItの障害物情報をUnity上にも反映させる • Unity側でplanning_sceneをSubscribeするscriptを作成。 • Subscribeした情報をもとにGameObject(基本モデル、Primitive)を追加する。 11 Good! ROSとUnityで座標系が異なることが悩みのタネだったが、簡単に変換できるので 実装がかなり楽だった。
12.
実際に動作させた結果を紹介 12
13.
まとめ ROSと連携できるシミュレータとしてUnityを活用した事例を紹介。 今後の課題 • Unity上でのセンサを用意する。例えば仮想的なRealsenseをUnity上で作成し、 MoveItの障害物情報としたい。 • ros_controlでUnityとの通信がROSのPub/Sub経由で行われているので、 余計な通信が発生している。できれば変更したい。 もし良いアプローチがありましたらコメントお願いします。 13
14.
ご静聴ありがとうございました。 質問があれば、お気軽にどうぞ!! 14
Download






















![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
















































