Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
TY
Uploaded by
Toshihiko Yamakami
4,446 views
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
ロボット・ソフトウェア開発環境ROSとは何か? 入門用にまとめてみた(ROS1.0中心)。 [改版履歴] 170321 誤記訂正 170321 a1703talk what-is-ros-170321
Technology
◦
Read more
8
Save
Share
Embed
Embed presentation
Download
Downloaded 47 times
1
/ 16
2
/ 16
3
/ 16
4
/ 16
5
/ 16
6
/ 16
7
/ 16
8
/ 16
9
/ 16
10
/ 16
11
/ 16
12
/ 16
13
/ 16
14
/ 16
15
/ 16
16
/ 16
More Related Content
PPTX
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
QoS for ROS 2 Dashing/Eloquent
by
Hideki Takase
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
PPTX
確率ロボティクス第11回
by
Ryuichi Ueda
PDF
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
QoS for ROS 2 Dashing/Eloquent
by
Hideki Takase
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
確率ロボティクス第11回
by
Ryuichi Ueda
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
What's hot
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
ソフトウェアテストの変遷と最近の品質管理の方向性
by
Keizo Tatsumi
PPTX
なぜコンピュータを学ばなければならないのか 21世紀の君主論
by
Tokoroten Nakayama
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
PDF
STMとROSをシリアル通信させて移動ロボットを作る
by
mozyanari
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
ツール比較しながら語る O/RマッパーとDBマイグレーションの実際のところ
by
Y Watanabe
PDF
つくばチャレンジ2019技術調査報告
by
Yoshitaka HARA
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
PDF
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
PDF
WebSocket / WebRTCの技術紹介
by
Yasuhiro Mawarimichi
PDF
ROSによる今後のロボティクスのあり方
by
Mori Ken
PDF
ROS2勉強会 4章前半
by
tomohiro kuwano
PDF
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
PDF
RvizPlugin作成入門
by
Sho Takahashi
PDF
機械学習システム開発案件の事例紹介
by
BrainPad Inc.
PDF
テスト文字列に「うんこ」と入れるな
by
Kentaro Matsui
PDF
UXデザインワークショップ資料 by ATOMOS DESIGN
by
Akihiko Kodama
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
ソフトウェアテストの変遷と最近の品質管理の方向性
by
Keizo Tatsumi
なぜコンピュータを学ばなければならないのか 21世紀の君主論
by
Tokoroten Nakayama
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
STMとROSをシリアル通信させて移動ロボットを作る
by
mozyanari
オープンソース SLAM の分類
by
Yoshitaka HARA
ツール比較しながら語る O/RマッパーとDBマイグレーションの実際のところ
by
Y Watanabe
つくばチャレンジ2019技術調査報告
by
Yoshitaka HARA
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
WebSocket / WebRTCの技術紹介
by
Yasuhiro Mawarimichi
ROSによる今後のロボティクスのあり方
by
Mori Ken
ROS2勉強会 4章前半
by
tomohiro kuwano
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
RvizPlugin作成入門
by
Sho Takahashi
機械学習システム開発案件の事例紹介
by
BrainPad Inc.
テスト文字列に「うんこ」と入れるな
by
Kentaro Matsui
UXデザインワークショップ資料 by ATOMOS DESIGN
by
Akihiko Kodama
Similar to ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
PDF
2013 summercamp 05
by
openrtm
PDF
Rtm・ros相互運用プログラミング環境
by
openrtm
PPTX
第32回信号処理シンポジウム「Raspberry PiとROSを 使ったロボットシステム」
by
Ryuichi Ueda
PDF
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
PDF
TurtleBotで遊んでみた
by
naoyuki_iot
PDF
2015 summercamp 08
by
openrtm
PPTX
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
PPTX
ROSチュートリアル ROBOMECH2018
by
Ryuichi Ueda
PDF
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
PDF
ロボット管理プラットフォーム「 RoboticBase 」の紹介
by
Kazuki Urabe
PPTX
ロボットシステム学2015年第6回
by
Ryuichi Ueda
PPTX
ROS Gazebo unityを使ったロボット開発入門( Japanese )
by
terugdev
PPTX
ロボットシステム学2015年第12回
by
Ryuichi Ueda
PDF
ROS体験コース
by
NEDOROBOMARC
PDF
Jazug-8th: Azure AKS & FIWARE & Robot
by
Nobuyuki Matsui
PDF
Ros#を使ったROSとxRデバイスの通信
by
mozyanari
PPTX
20180421_CV勉強会_LT
by
sumisumith
PDF
ROS Tutorial 02 - CIT
by
Daiki Maekawa
PDF
WindowsではじめるROSプログラミング
by
Takayuki Goto
PDF
DYNAMIXEL ROS Package
by
Yoonseok Pyo
2013 summercamp 05
by
openrtm
Rtm・ros相互運用プログラミング環境
by
openrtm
第32回信号処理シンポジウム「Raspberry PiとROSを 使ったロボットシステム」
by
Ryuichi Ueda
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
TurtleBotで遊んでみた
by
naoyuki_iot
2015 summercamp 08
by
openrtm
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
ROSチュートリアル ROBOMECH2018
by
Ryuichi Ueda
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
ロボット管理プラットフォーム「 RoboticBase 」の紹介
by
Kazuki Urabe
ロボットシステム学2015年第6回
by
Ryuichi Ueda
ROS Gazebo unityを使ったロボット開発入門( Japanese )
by
terugdev
ロボットシステム学2015年第12回
by
Ryuichi Ueda
ROS体験コース
by
NEDOROBOMARC
Jazug-8th: Azure AKS & FIWARE & Robot
by
Nobuyuki Matsui
Ros#を使ったROSとxRデバイスの通信
by
mozyanari
20180421_CV勉強会_LT
by
sumisumith
ROS Tutorial 02 - CIT
by
Daiki Maekawa
WindowsではじめるROSプログラミング
by
Takayuki Goto
DYNAMIXEL ROS Package
by
Yoonseok Pyo
More from Toshihiko Yamakami
PDF
Toward Interactive People Analytics: A New Approach to Leverage Organizationa...
by
Toshihiko Yamakami
PDF
Amazon SageMaker: 機械学習の民主化から工業化へ(in Japanese)
by
Toshihiko Yamakami
PDF
ホワイトペーパーの書き方 (in Japanese)
by
Toshihiko Yamakami
PDF
認知科学に基づく「効果的なデモ」のヒント (in Japanese)
by
Toshihiko Yamakami
PDF
An Experimental Implementation of an Edge-based AI Engine with Edge-Cloud Co...
by
Toshihiko Yamakami
PDF
Singularity Literacy: Civic Skill Shift from Workplace to Studyplace
by
Toshihiko Yamakami
PDF
Lessons Learned in Tokyo Public Transportation Open Data APIs
by
Toshihiko Yamakami
PDF
A Dynamism View Model of Convergence and Divergence of IoT Standardization
by
Toshihiko Yamakami
PDF
A Visualization Framework to Empower Small and Medium-Sized Enterprises in Op...
by
Toshihiko Yamakami
PDF
A Social Dimension View Model of Divergence of IoT Standardization
by
Toshihiko Yamakami
PDF
Device Stand-by Management Scheme of IoT: A Framework for Dealing with Real-w...
by
Toshihiko Yamakami
PDF
行動誘導技術で読み解くアイディアマラソン (in Japanese)
by
Toshihiko Yamakami
PDF
論文SEOとは何か?(in Japanese)
by
Toshihiko Yamakami
PDF
A Dimensional Model of Service Design Toward Utilizing Public Transportation ...
by
Toshihiko Yamakami
PDF
シニア・イノベーションの視点
by
Toshihiko Yamakami
PDF
An Organizational Coordination Model for IoT: A Case Study of Requirement Eng...
by
Toshihiko Yamakami
PDF
An Evolution-by-design Approach: Toward Multi-disciplinary Life-cycle Manage...
by
Toshihiko Yamakami
PDF
A Migration-oriented Partial Adaptation Architecture for IoT-empowered City P...
by
Toshihiko Yamakami
PDF
A Dimensional Framework to Evaluate Coverage of IoT Services in City Platform...
by
Toshihiko Yamakami
PDF
Horizontal Requirement Engineering in Integration of Multiple IoT Use Cases o...
by
Toshihiko Yamakami
Toward Interactive People Analytics: A New Approach to Leverage Organizationa...
by
Toshihiko Yamakami
Amazon SageMaker: 機械学習の民主化から工業化へ(in Japanese)
by
Toshihiko Yamakami
ホワイトペーパーの書き方 (in Japanese)
by
Toshihiko Yamakami
認知科学に基づく「効果的なデモ」のヒント (in Japanese)
by
Toshihiko Yamakami
An Experimental Implementation of an Edge-based AI Engine with Edge-Cloud Co...
by
Toshihiko Yamakami
Singularity Literacy: Civic Skill Shift from Workplace to Studyplace
by
Toshihiko Yamakami
Lessons Learned in Tokyo Public Transportation Open Data APIs
by
Toshihiko Yamakami
A Dynamism View Model of Convergence and Divergence of IoT Standardization
by
Toshihiko Yamakami
A Visualization Framework to Empower Small and Medium-Sized Enterprises in Op...
by
Toshihiko Yamakami
A Social Dimension View Model of Divergence of IoT Standardization
by
Toshihiko Yamakami
Device Stand-by Management Scheme of IoT: A Framework for Dealing with Real-w...
by
Toshihiko Yamakami
行動誘導技術で読み解くアイディアマラソン (in Japanese)
by
Toshihiko Yamakami
論文SEOとは何か?(in Japanese)
by
Toshihiko Yamakami
A Dimensional Model of Service Design Toward Utilizing Public Transportation ...
by
Toshihiko Yamakami
シニア・イノベーションの視点
by
Toshihiko Yamakami
An Organizational Coordination Model for IoT: A Case Study of Requirement Eng...
by
Toshihiko Yamakami
An Evolution-by-design Approach: Toward Multi-disciplinary Life-cycle Manage...
by
Toshihiko Yamakami
A Migration-oriented Partial Adaptation Architecture for IoT-empowered City P...
by
Toshihiko Yamakami
A Dimensional Framework to Evaluate Coverage of IoT Services in City Platform...
by
Toshihiko Yamakami
Horizontal Requirement Engineering in Integration of Multiple IoT Use Cases o...
by
Toshihiko Yamakami
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese)
1.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ロボット・ソフトウェア 開発環境 ROS とは何か?
(ROS: Robot Operating System) 山上俊彦 IoT 事業本部, ACCESS Toshihiko.Yamakami@access-company.com 2017/03 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 1 / 16
2.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS ロボット開発環境 (OSS) - モジュラーに作る (共有可能) 【ロボット OS(Willow
Garage が提供 →Open Source Robotics Foundation が維持)】 既存ソフト資産の組み合わせで簡単にロボットソフトが作れる (座標系、移動計画、3D シミュレータ) 比較的簡単に分散並列システムが作れる 物理エンジンを搭載したシミュレータが使える センサーを可視化できる 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 2 / 16
3.
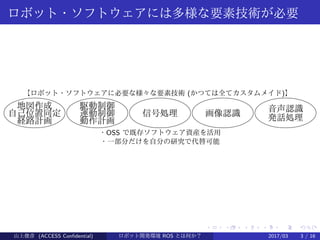
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ロボット・ソフトウェアには多様な要素技術が必要 地図作成 自己位置同定 経路計画 駆動制御 運動制御 動作計画 信号処理 画像認識 音声認識 発話処理 【ロボット・ソフトウェアに必要な様々な要素技術 (かつては全てカスタムメイド)】 ・OSS
で既存ソフトウェア資産を活用 ・一部分だけを自分の研究で代替可能 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 3 / 16
4.
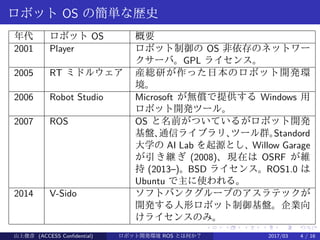
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ロボット OS の簡単な歴史 年代
ロボット OS 概要 2001 Player ロボット制御の OS 非依存のネットワー クサーバ。GPL ライセンス。 2005 RT ミドルウェア 産総研が作った日本のロボット開発環 境。 2006 Robot Studio Microsoft が無償で提供する Windows 用 ロボット開発ツール。 2007 ROS OS と名前がついているがロボット開発 基盤、通信ライブラリ、ツール群。Standord 大学の AI Lab を起源とし、Willow Garage が引き継ぎ (2008)、現在は OSRF が維 持 (2013–)。BSD ライセンス。ROS1.0 は Ubuntu で主に使われる。 2014 V-Sido ソフトバンクグループのアスラテックが 開発する人形ロボット制御基盤。企業向 けライセンスのみ。 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 4 / 16
5.
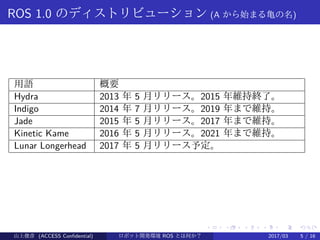
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS 1.0 のディストリビューション
(A から始まる亀の名) 用語 概要 Hydra 2013 年 5 月リリース。2015 年維持終了。 Indigo 2014 年 7 月リリース。2019 年まで維持。 Jade 2015 年 5 月リリース。2017 年まで維持。 Kinetic Kame 2016 年 5 月リリース。2021 年まで維持。 Lunar Longerhead 2017 年 5 月リリース予定。 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 5 / 16
6.
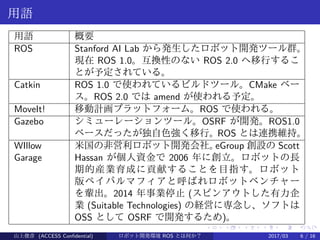
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 用語 用語 概要 ROS Stanford
AI Lab から発生したロボット開発ツール群。 現在 ROS 1.0。互換性のない ROS 2.0 へ移行するこ とが予定されている。 Catkin ROS 1.0 で使われているビルドツール。CMake ベー ス。ROS 2.0 では amend が使われる予定。 MoveIt! 移動計画プラットフォーム。ROS で使われる。 Gazebo シミューレーションツール。OSRF が開発。ROS1.0 ベースだったが独自色強く移行。ROS とは連携維持。 WIllow Garage 米国の非営利ロボット開発会社。eGroup 創設の Scott Hassan が個人資金で 2006 年に創立。ロボットの長 期的産業育成に貢献することを目指す。ロボット 版ペイパルマフィアと呼ばれロボットベンチャー を輩出。2014 年事業停止 (スピンアウトした有力企 業 (Suitable Technologies) の経営に専念し、ソフトは OSS として OSRF で開発するため)。 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 6 / 16
7.
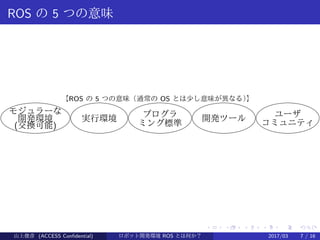
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS の 5
つの意味 モジュラーな 開発環境 (交換可能) 実行環境 プログラ ミング標準 開発ツール ユーザ コミュニティ 【ROS の 5 つの意味(通常の OS とは少し意味が異なる)】 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 7 / 16
8.
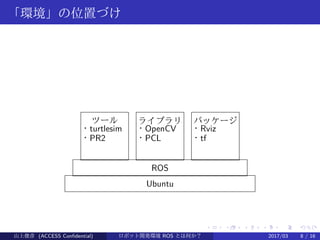
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 「ソフト開発環境」の位置づけ パッケージ ・Rviz ・tf ライブラリ ・OpenCV ・PCL ツール ・turtlesim ・PR2 ROS Ubuntu 山上俊彦 (ACCESS Confidential)
ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 8 / 16
9.
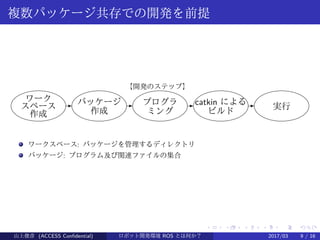
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 複数パッケージ共存での開発を前提 ワーク スペース 作成 - パッケージ 作成 - プログラ ミング -
catkin による ビルド - 実行 【開発のステップ】 ワークスペース: パッケージを管理するディレクトリ パッケージ: プログラム及び関連ファイルの集合 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 9 / 16
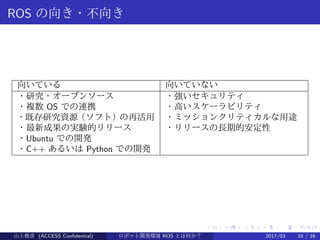
10.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS の向き・不向き 向いている 向いていない ・研究・オープンソース
・強いセキュリティ ・複数 OS での連携 ・高いスケーラビリティ ・既存研究資源(ソフト)の再活用 ・ミッションクリティカルな用途 ・最新成果の実験的リリース ・リリースの長期的安定性 ・Ubuntu での開発 ・C++ あるいは Python での開発 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 10 / 16
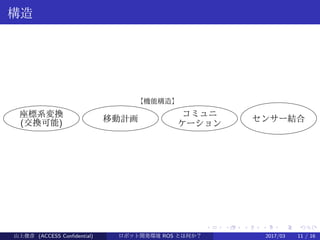
11.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 構造 座標系変換 (交換可能) 移動計画 コミュニ ケーション センサー結合 【機能構造】 山上俊彦 (ACCESS
Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 11 / 16
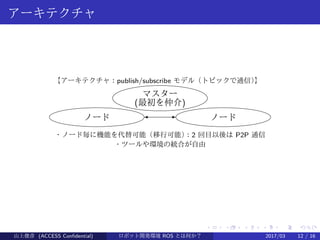
12.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . アーキテクチャ ノード - マスター (最初を仲介) ノード 【アーキテクチャ:publish/subscribe モデル(トピックで通信)】 ・ノード毎に機能を代替可能(移行可能):2
回目以後は P2P 通信 ・ツールや環境の統合が自由 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 12 / 16
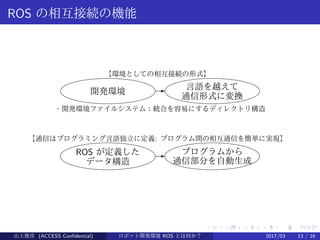
13.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS の相互接続の機能 開発環境 -
言語を越えて 通信形式に変換 【環境としての相互接続の形式】 ・開発環境ファイルシステム:統合を容易にするディレクトリ構造 ROS が定義した データ構造 - プログラムから 通信部分を自動生成 【通信はプログラミング言語独立に定義: プログラム間の相互通信を簡単に実現】 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 13 / 16
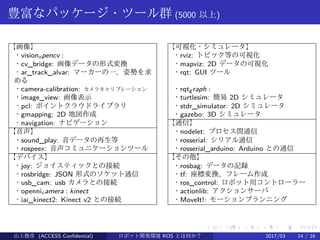
14.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 豊富なパッケージ・ツール群 (5000 以上) 【画像】
【可視化・シミュレータ】 ・vision_opencv: 画像認識ライブラリ ・rviz: トピック等の可視化 ・cv_bridge: 画像データの形式変換 ・mapviz: 2D データの可視化 ・ar_track_alvar: マーカーの位置、姿勢を求める ・rqt: GUI ツール ・camera-calibration: カメラキャリブレーション ・rqt_graph: ノード等をグラフ化 ・image_view: 画像表示 ・turtlesim: 簡易 2D シミュレータ ・pcl: ポイントクラウドライブラリ ・stdr_simulator: 2D シミュレータ ・gmapping: 2D 地図作成 ・gazebo: 3D シミュレータ ・navigation: ナビゲーション 【通信】 【音声】 ・nodelet: プロセス間通信 ・sound_play: 音データの再生等 ・rosserial: シリアル通信 ・rospeex: 音声コミュニケーションツール ・rosserial_arduino: Arduino との通信 【デバイス】 【その他】 ・joy: ジョイスティックとの接続 ・rosbag: データの記録 ・rosbridge: JSON 形式のソケット通信 ・tf: 座標変換、フレーム作成 ・usb_cam: usb カメラとの接続 ・ros_control: ロボット用コントローラー ・openni_camera: kinect との接続 ・actionlib: アクションサーバ ・iai_kinect2: Kinect v2 との接続 ・MoveIt!: モーションプランニング 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 14 / 16
15.
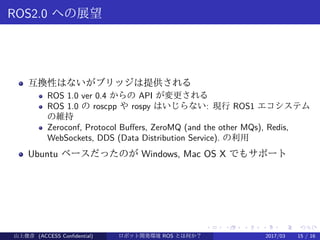
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ROS2.0 への展望 互換性はないがブリッジは提供される ROS 1.0
ver 0.4 からの API が変更される ROS 1.0 の roscpp や rospy はいじらない: 現行 ROS1 エコシステム の維持 Zeroconf, Protocol Buffers, ZeroMQ (and the other MQs), Redis, WebSockets, DDS (Data Distribution Service). の利用 Ubuntu ベースだったのが Windows, Mac OS X でもサポート 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 15 / 16
16.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 参考文献 「ROSCon 2016 Seoul
Day 1: Plan to Win with MoveIt! - Lessons learnt from the Amazon Picking Challenge 2016 https://vimeo.com/187699449 Operating System ROS 8 years https://www.youtube.com/watch?v=Z70_3wMFO24 What is ROS? https://www.youtube.com/watch?v=t2lIQSBaNcY Introduction to ROS and MoveIt! https://www.youtube.com/watch?v=eMlGV94c5WU ROS tutorial #1: Introduction, Installing ROS, and running the Turtlebot simulator. https://www.youtube.com/watch?v=9U6GDonGFHw ROS tutorial #2.1: C++ walkthrough of publisher / subscriber lab https://www.youtube.com/watch?v=2Cmdu6mkxD0 ROS によるロボットソフトウェアの開発 https://www.slideshare.net/yyamauchi/ros-62750941 (2016 年) 詳説 ROS プログラミング –導入から SLAM,Gazebo,Moveit まで– http://robotics.ait.kyushu-u.ac.jp/books/ROSBOOK_JP.pdf (2015 年) ROS の概念 http://wiki.ros.org/ja/ROS/Concepts ROS JAPAN Users Group Meetup 01 https://www.slideshare.net/DaikiMaekawa/ros-meetup-01-33458682 (2014 年) ロボット開発で注目される「ROS」(Robot Operating System)とは何か (1/3) http://monoist.atmarkit.co.jp/mn/articles/1504/14/news006.html (2015 年) ROS ディストリビューション http://wiki.ros.org/Distributions ロボットの“PARC”「Willow Garage」が撒いた種 (1/4) http://monoist.atmarkit.co.jp/mn/articles/1607/22/news008.html (2016 年) Why ROS 2.0? http://design.ros2.org/articles/why_ros2.html 山上俊彦 (ACCESS Confidential) ロボット・ソフトウェア開発環境 ROS とは何か? (ROS: Robot Operatin2017/03 16 / 16
Download




















![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
















































