2018年8月29日開催 けーすた! #5 - Case Study ! Lightning Talk - リンク: https://casestudy.connpass.com/event/95140/


![問題
4Copyright © 2018 OPTiM Co. All Rights Reserved
260.6
209.7
192.2
181.6
平成22度 平成27度 平成28度 平成29度
人口[万人]
人口の推移
農林水産省: http://www.maff.go.jp/j/tokei/sihyo/data/08.html
ヒント1.](https://image.slidesharecdn.com/lt-180906061954/85/ROS-4-320.jpg)
















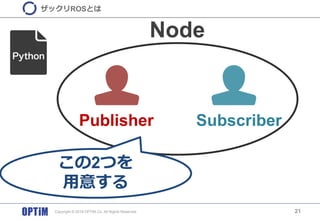

















![センサーデータを収集して障害物検知
39Copyright © 2018 OPTiM Co. All Rights Reserved
配列内に入っているデータとセンサの関係
[359]
[89] [269]
[179]](https://image.slidesharecdn.com/lt-180906061954/85/ROS-39-320.jpg)
![センサーデータを収集して障害物検知
40Copyright © 2018 OPTiM Co. All Rights Reserved
配列内に入っているデータとセンサの関係
[359]
[89] [269]
[179]
右側の
データが…](https://image.slidesharecdn.com/lt-180906061954/85/ROS-40-320.jpg)

![センサーデータを収集して障害物検知
43Copyright © 2018 OPTiM Co. All Rights Reserved
配列内に入っているデータとセンサの関係
[359]
[89] [269]
[179]
とりあえず
Θ欲しい](https://image.slidesharecdn.com/lt-180906061954/85/ROS-43-320.jpg)

![センサーデータを収集して障害物検知
45Copyright © 2018 OPTiM Co. All Rights Reserved
Θはどうやってだす?
開始角度
角度の増加量
何番目のデータか
[i]](https://image.slidesharecdn.com/lt-180906061954/85/ROS-45-320.jpg)
![センサーデータを収集して障害物検知
46Copyright © 2018 OPTiM Co. All Rights Reserved
Θはどうやってだす?
開始角度
角度の増加量
+
何番目のデータか
[i]
×](https://image.slidesharecdn.com/lt-180906061954/85/ROS-46-320.jpg)





































![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)





































