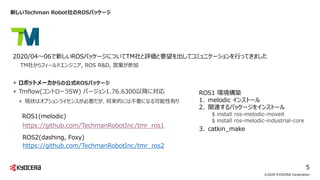
Techman ros package https://github.com/TechmanRobotInc/tmr_ros1 ROS1(melodic) ROS2(dashing, Foxy) https://github.com/TechmanRobotInc/tmr_ros2