Download as PDF, PPTX


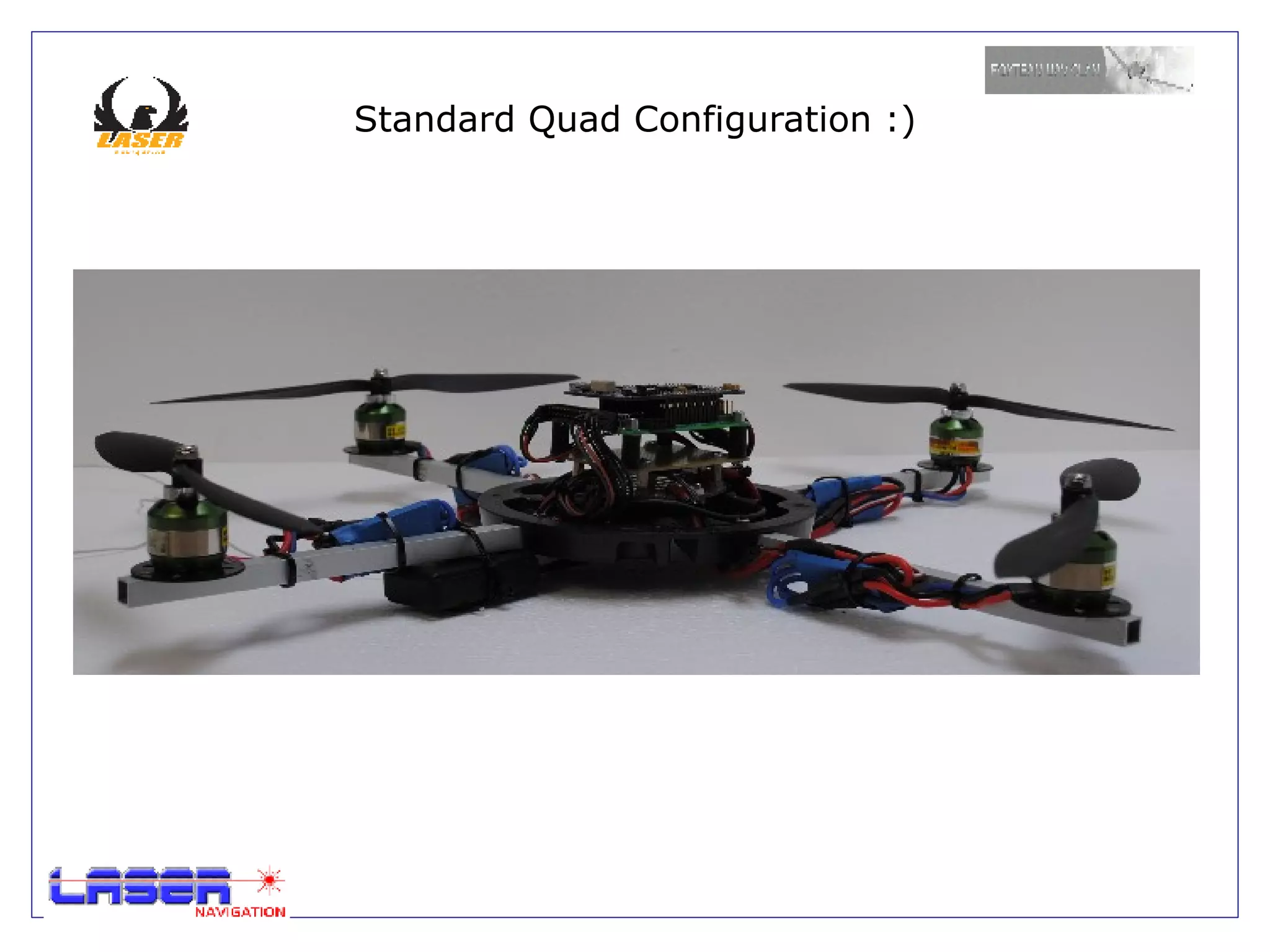



- The document describes the Multipilot 32, a flight controller board developed by LASER NAVIGATION. - It has an ARM Cortex-M3 processor, 512KB flash memory, 64KB RAM, and interfaces for sensors, radios, motors and more. - The board runs ChibiOS or VROS and supports projects like OpenPilot, AutoPilot and Paparazzi. It is compatible with many sensors, radios and brushless ESC/servos. - Developers can use IDEs like CooCox, Eclipse, or commercial options, with libraries for sensor control, radio control and more. - The Multipilot 32 is available for pre-



































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)

















