Download as PDF, PPTX





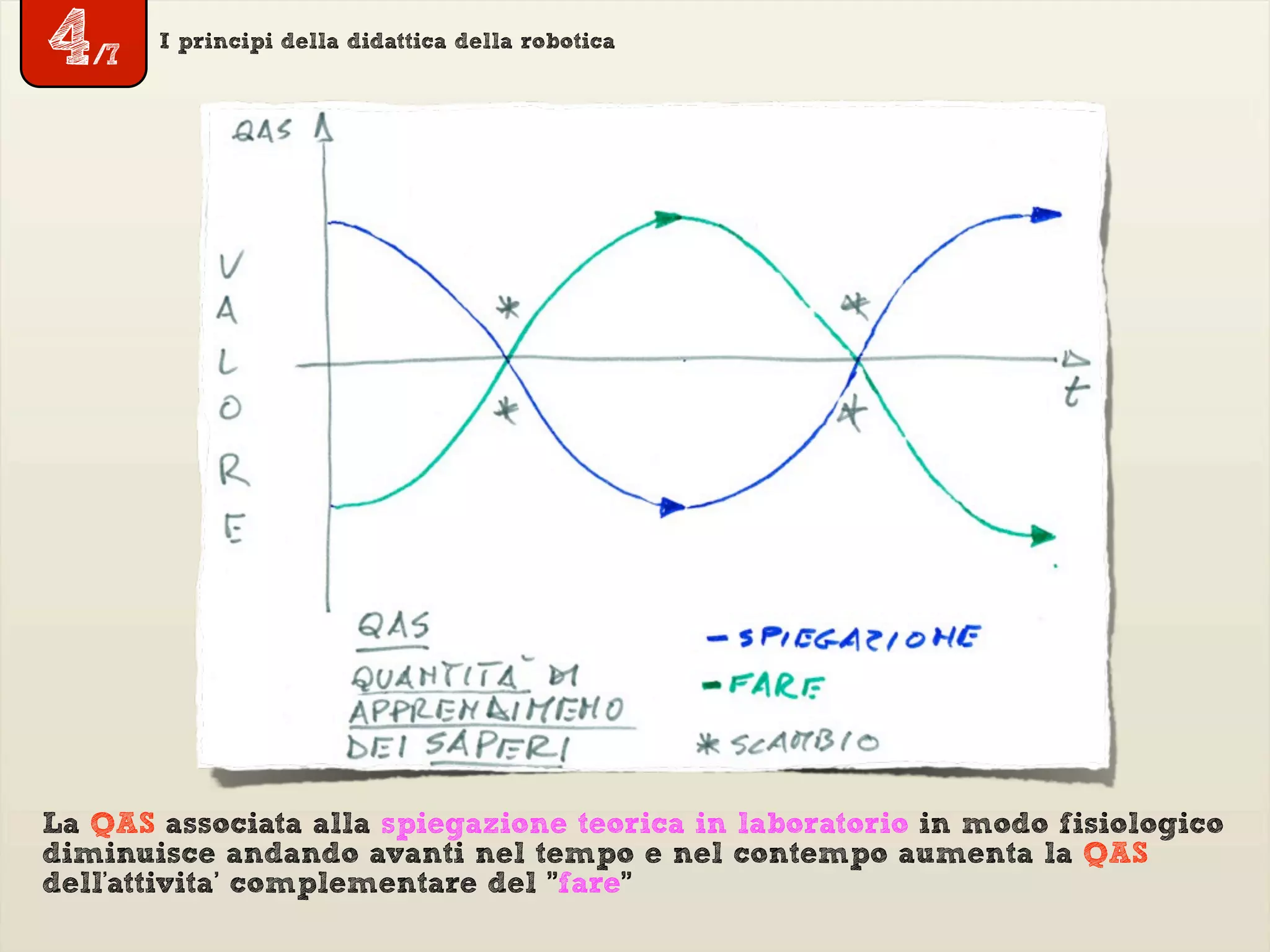
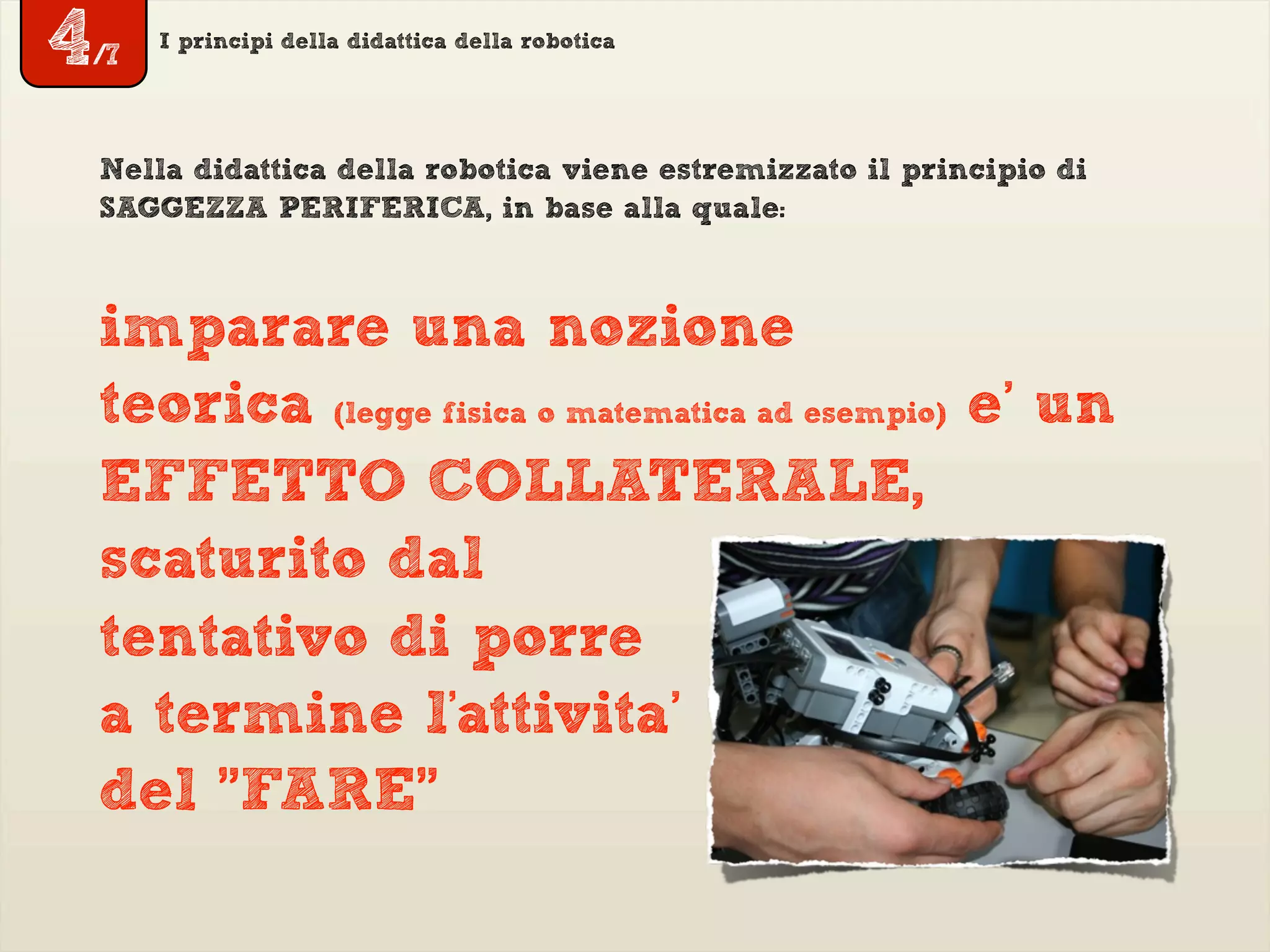

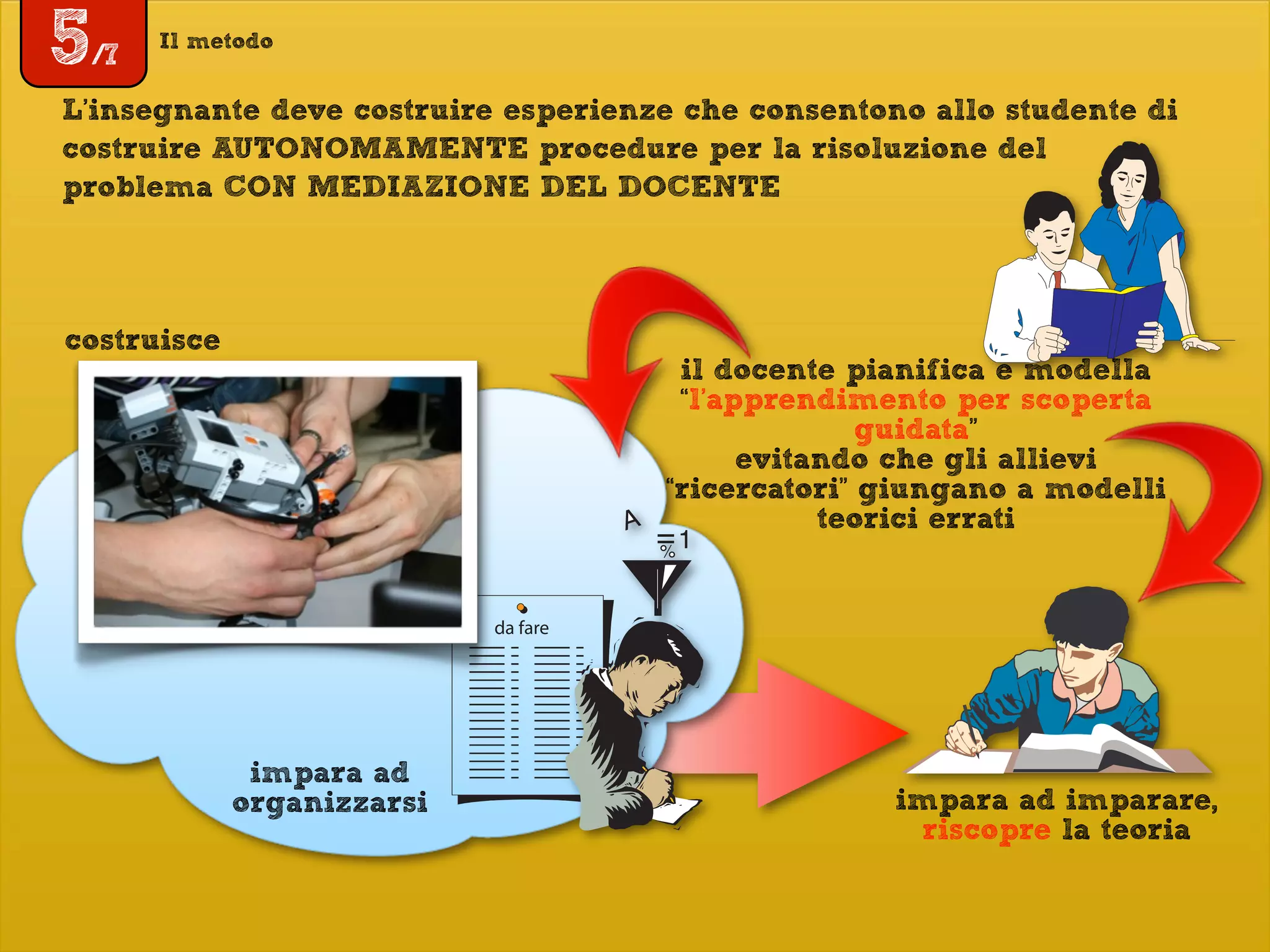
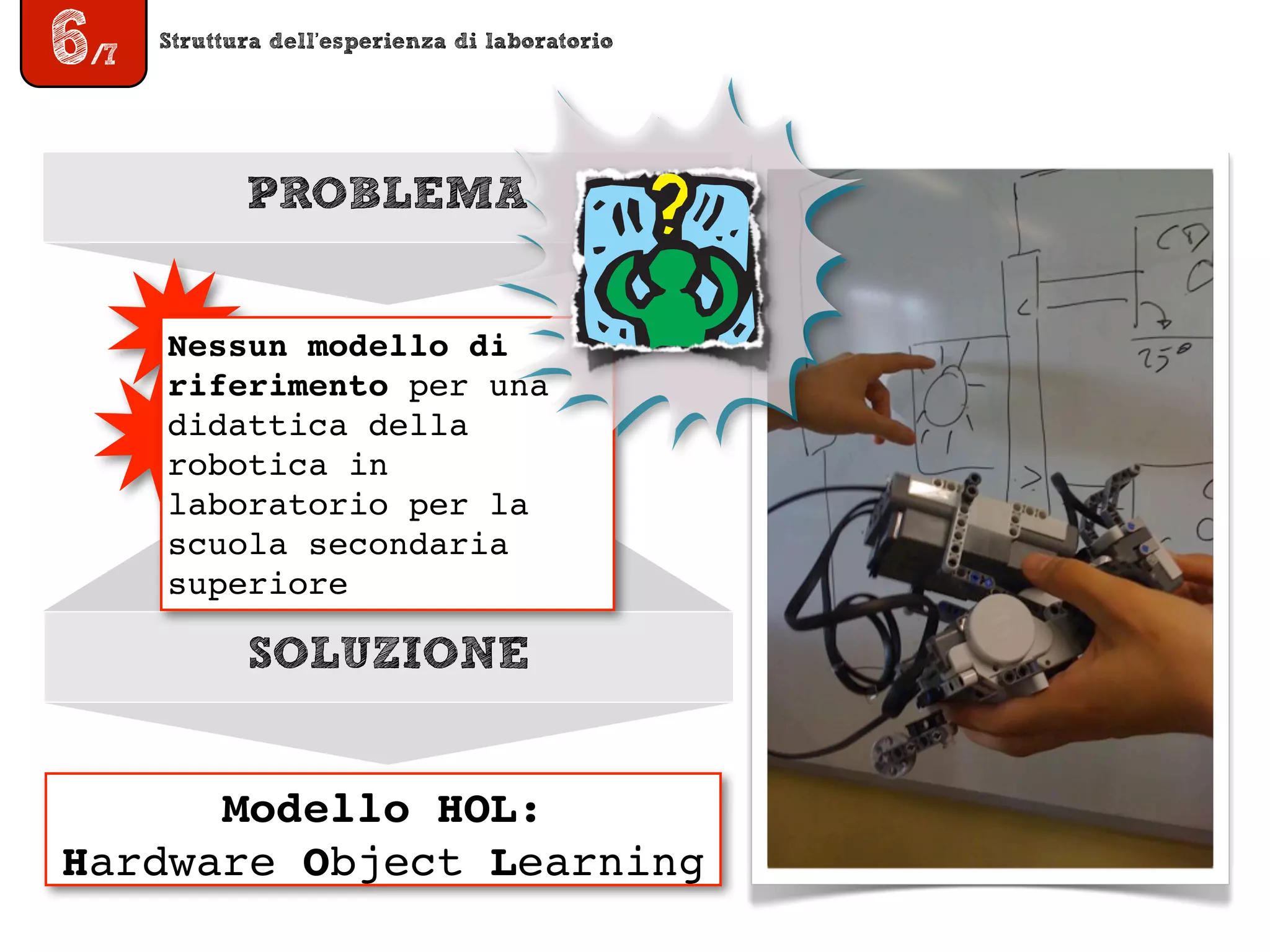
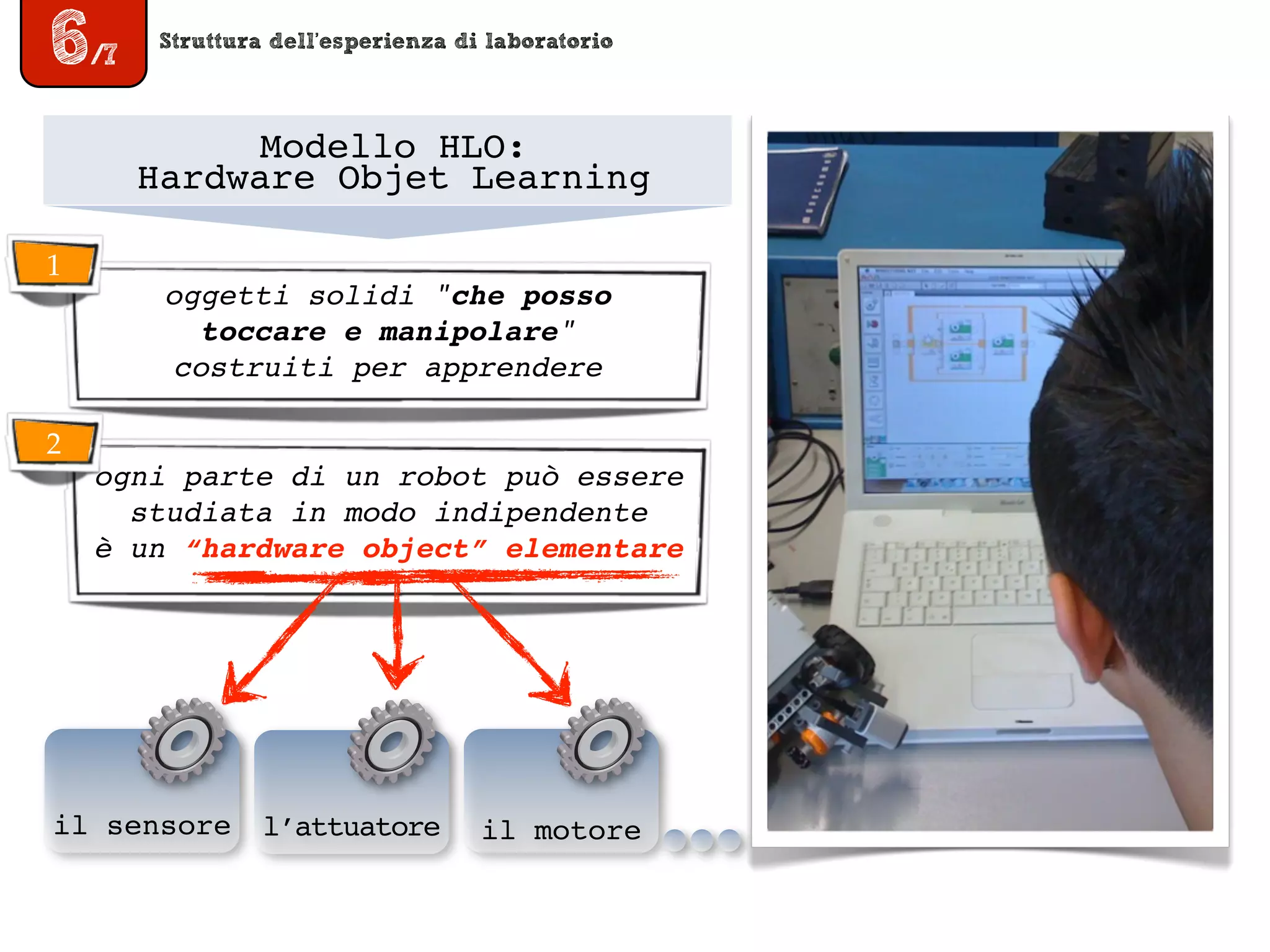
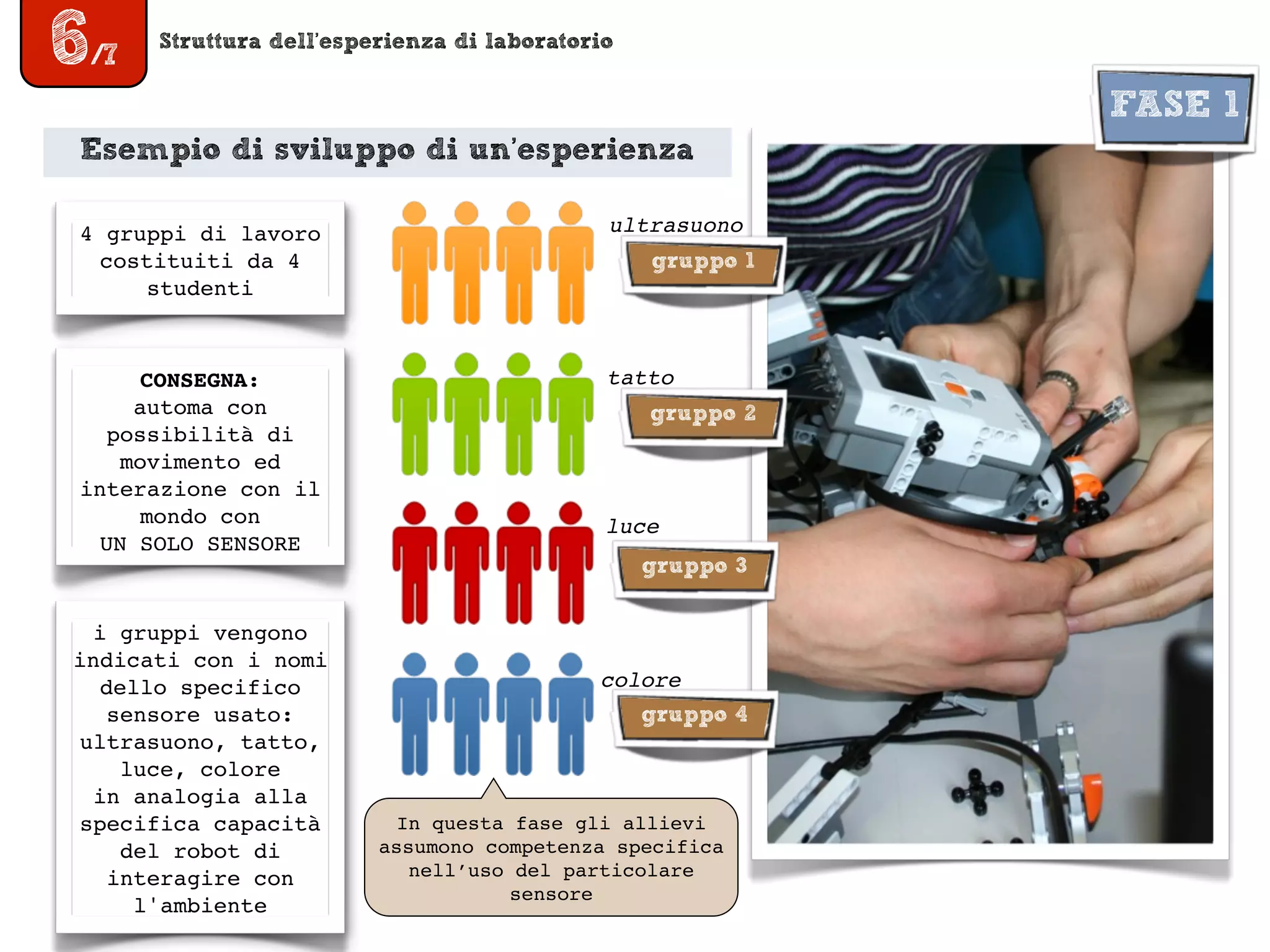
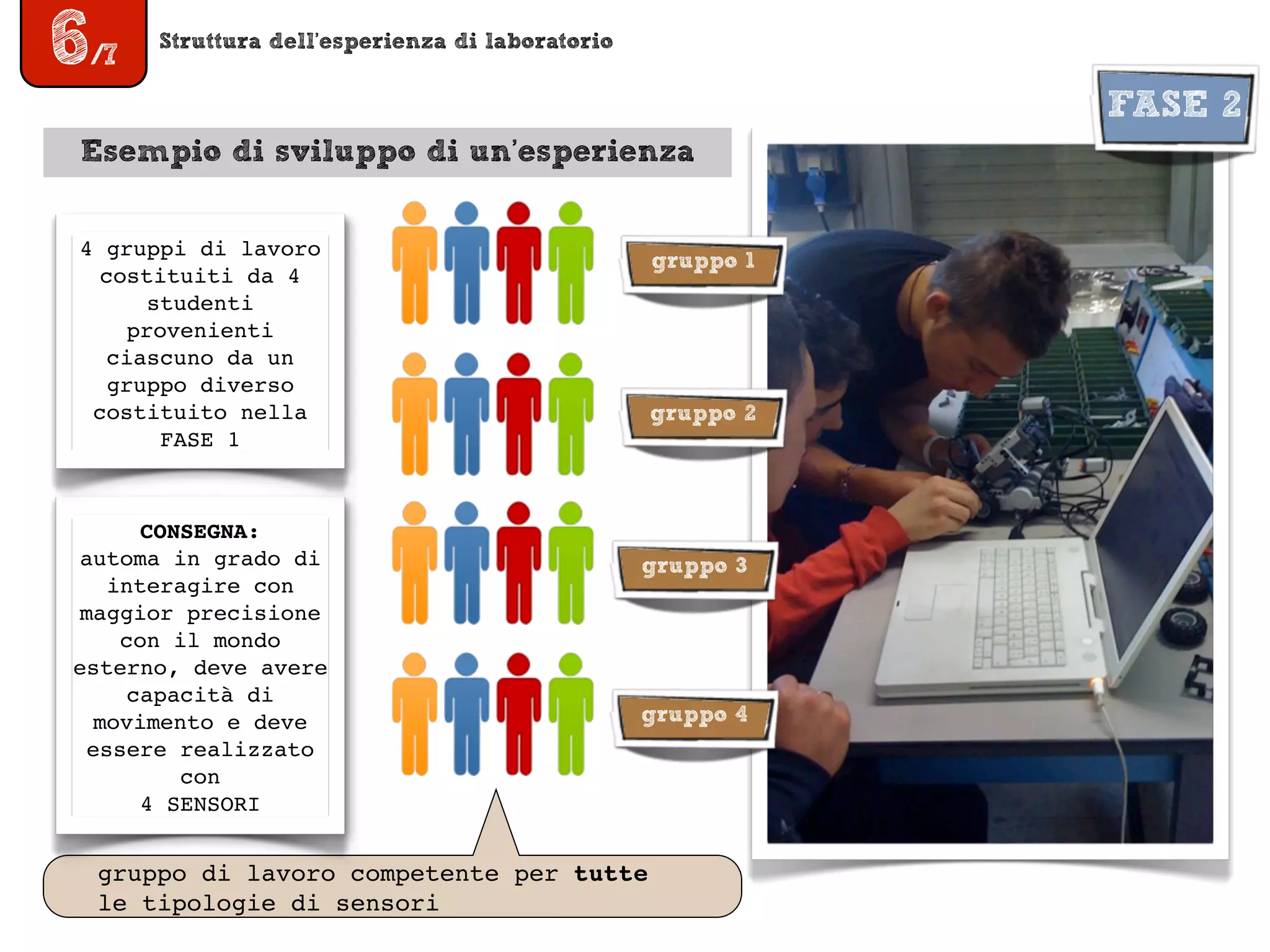
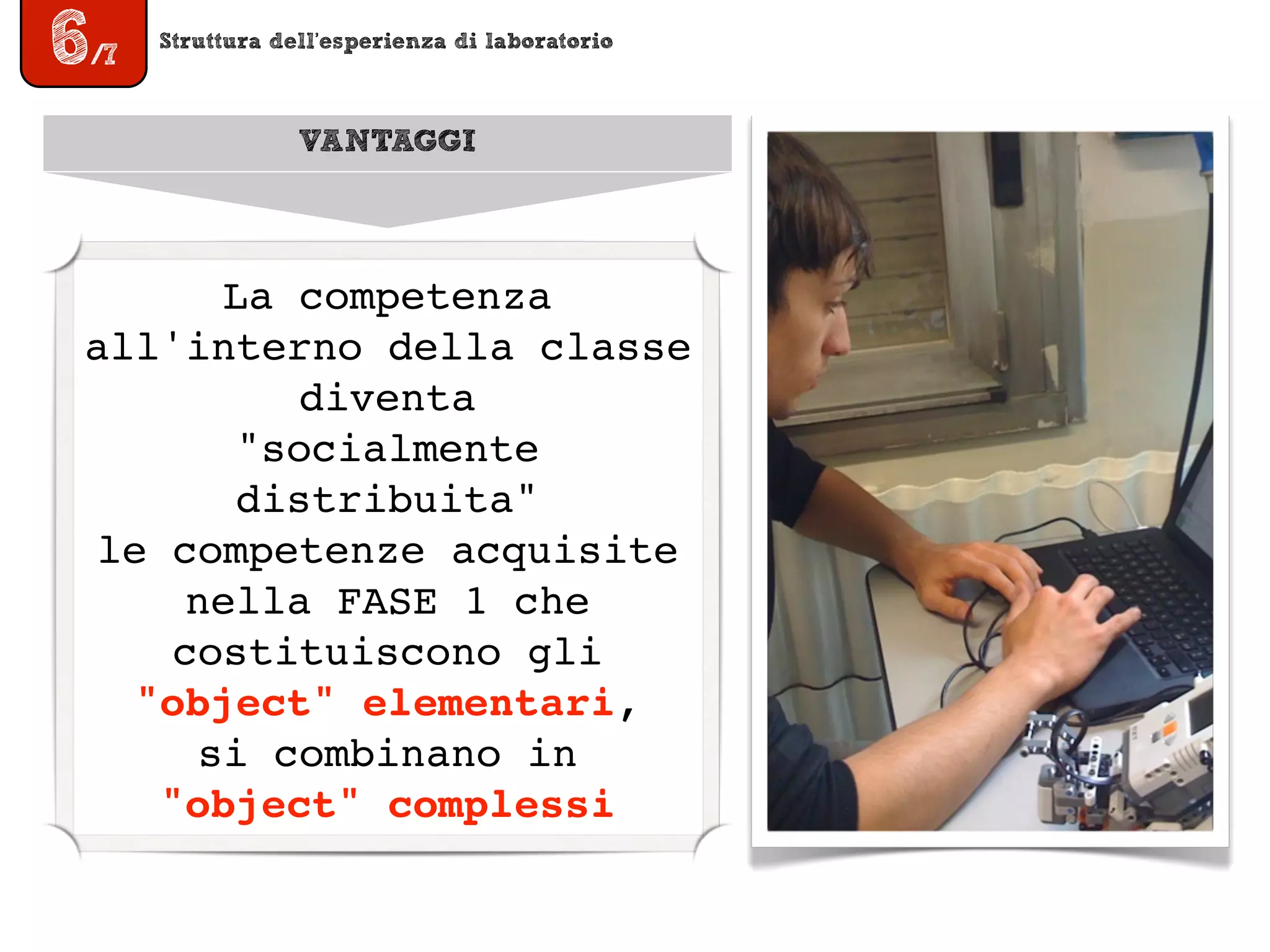

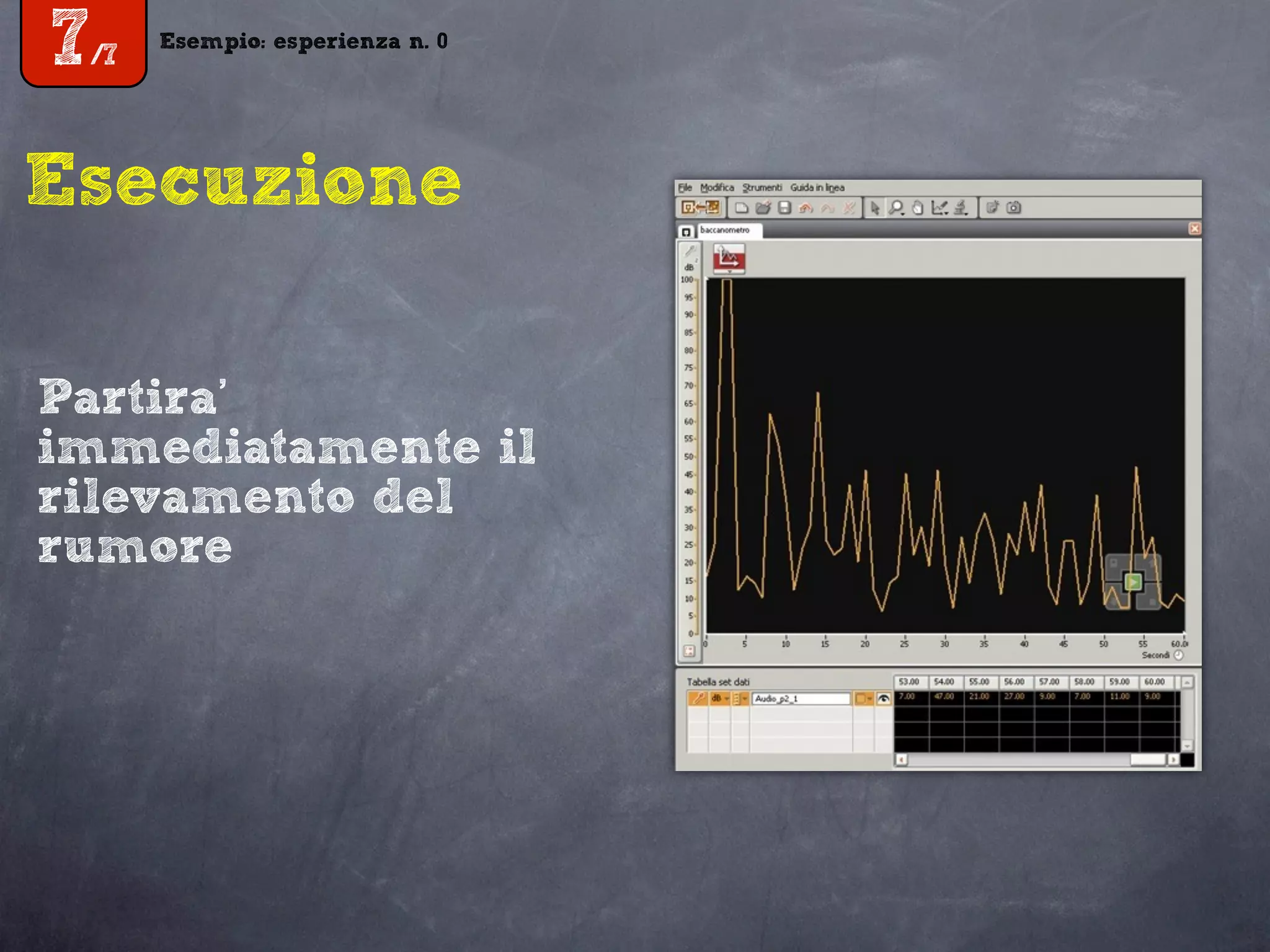
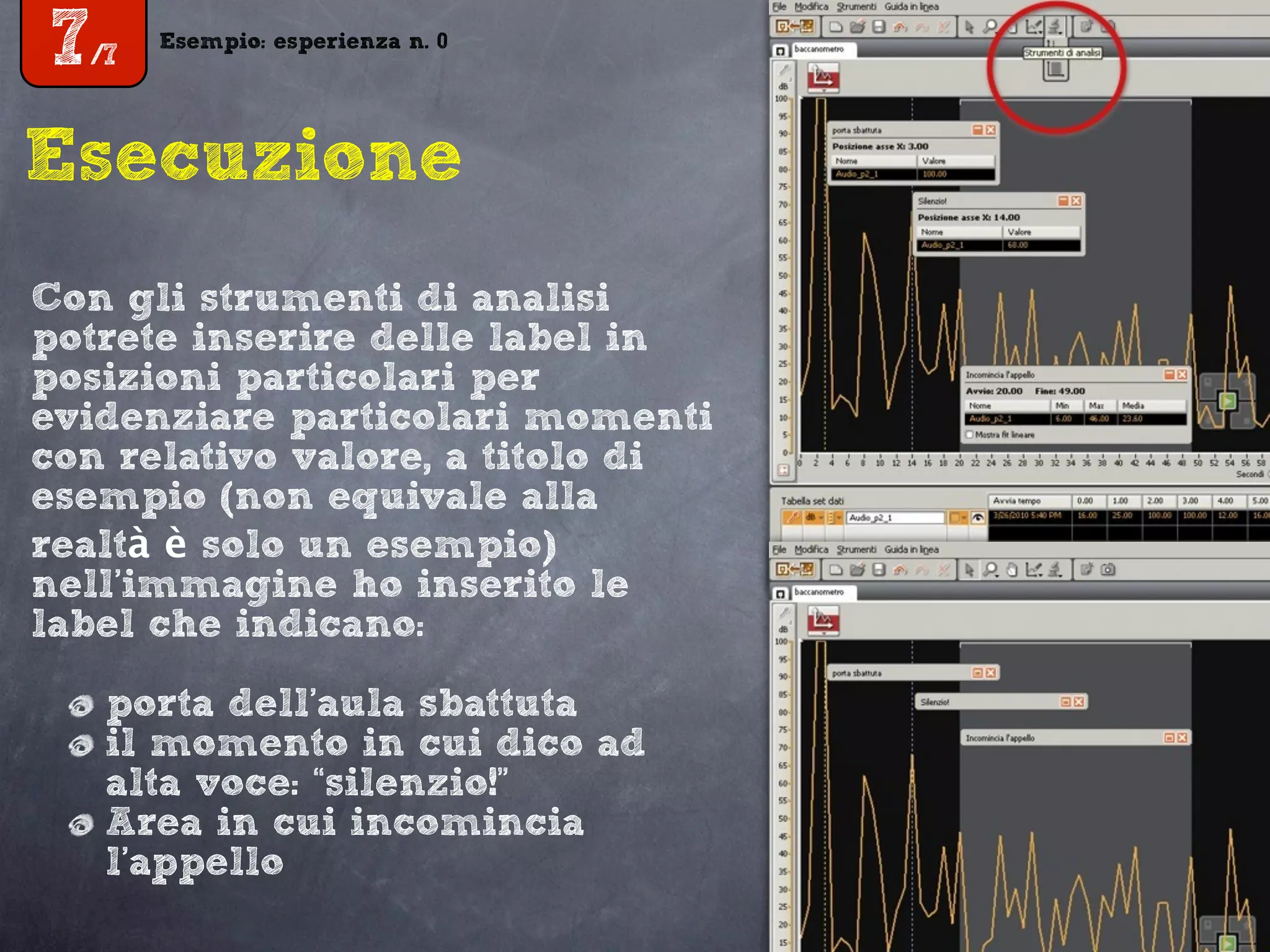
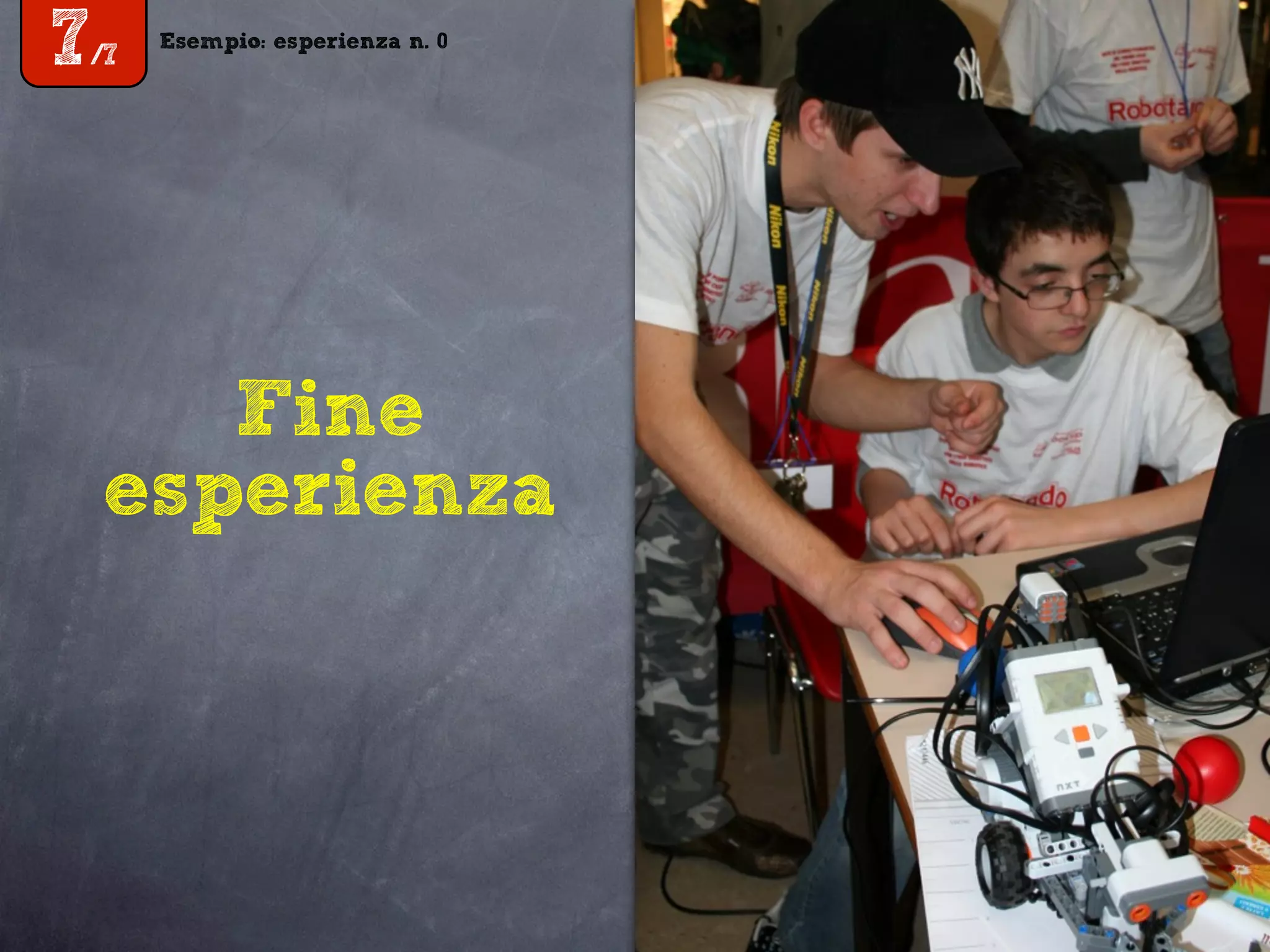



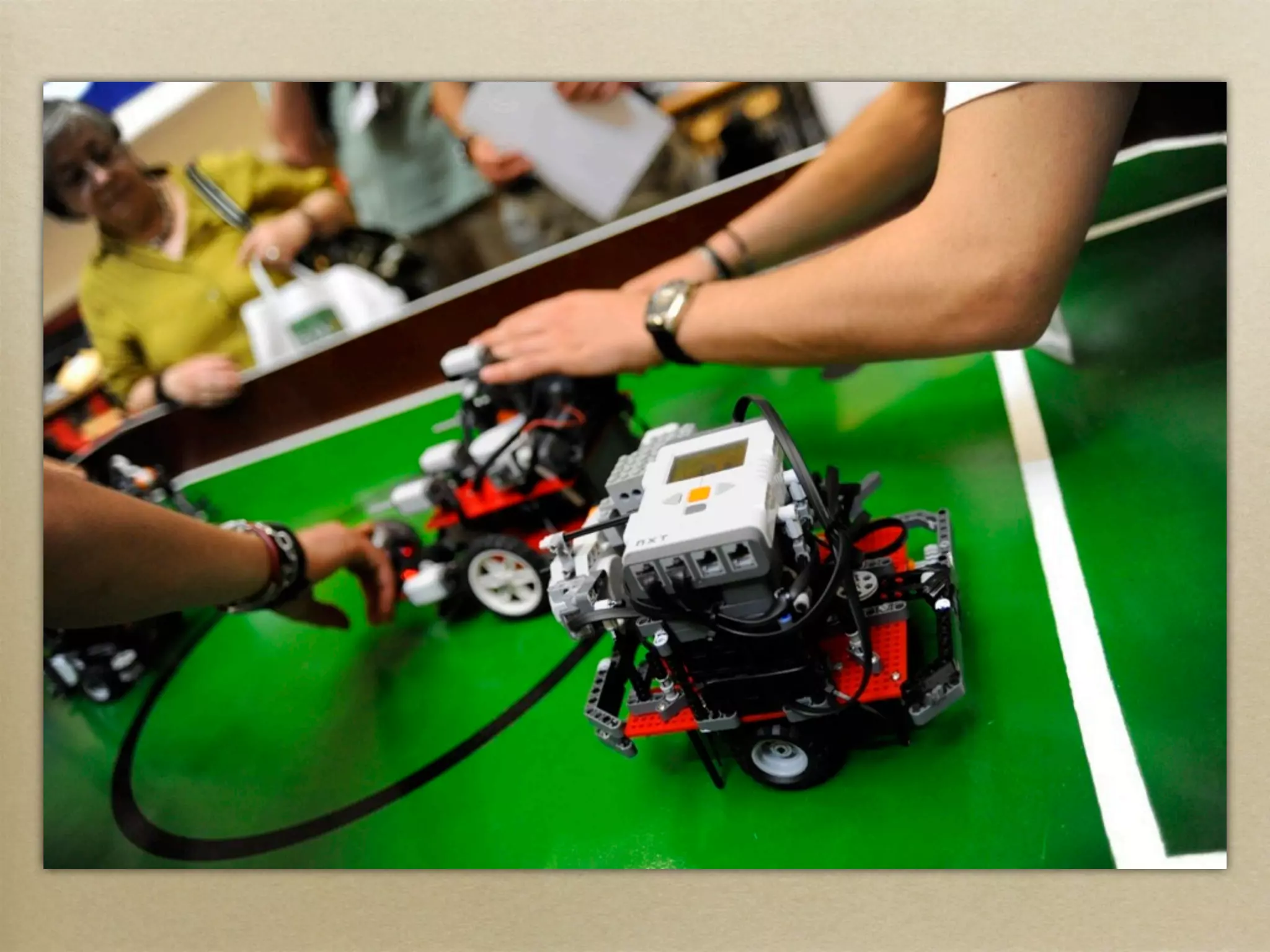


Il seminario di Michele Maffucci presenta proposte didattiche per l'insegnamento della robotica nel secondo ciclo, evidenziando l'importanza di un approccio pratico per migliorare le competenze logiche e matematiche degli studenti. Si discutono principi metodologici basati sulla concretezza, l'alternanza tra teoria e pratica, e la saggezza periferica, sottolineando il valore aggiunto della robotica rispetto ai metodi tradizionali. Infine, viene fornito un esempio concreto di un progetto di laboratorio volto a misurare il rumore in aula tramite un robot, incentivando il lavoro di gruppo e l'apprendimento attivo.





























































































