Download as PDF, PPTX
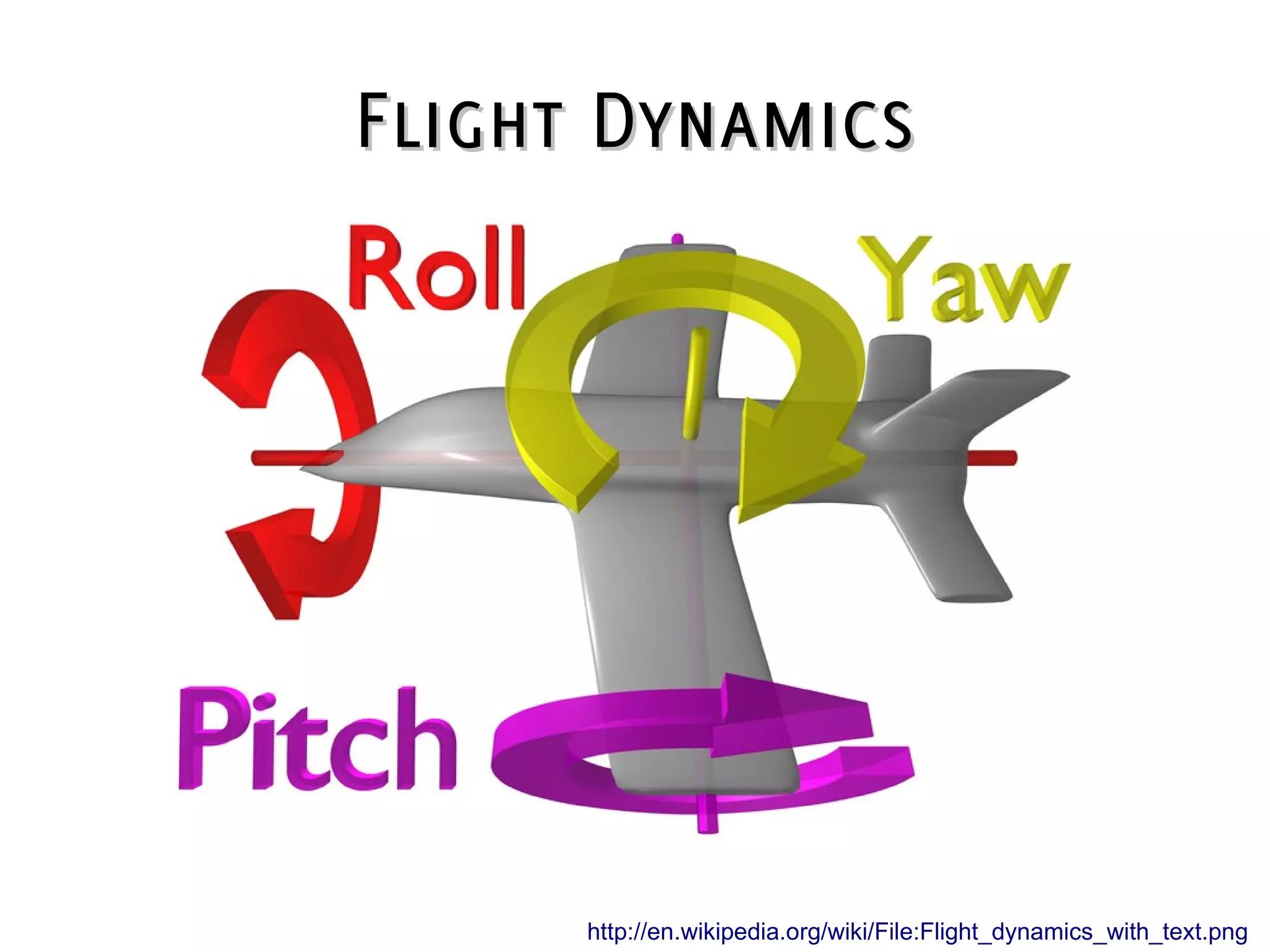
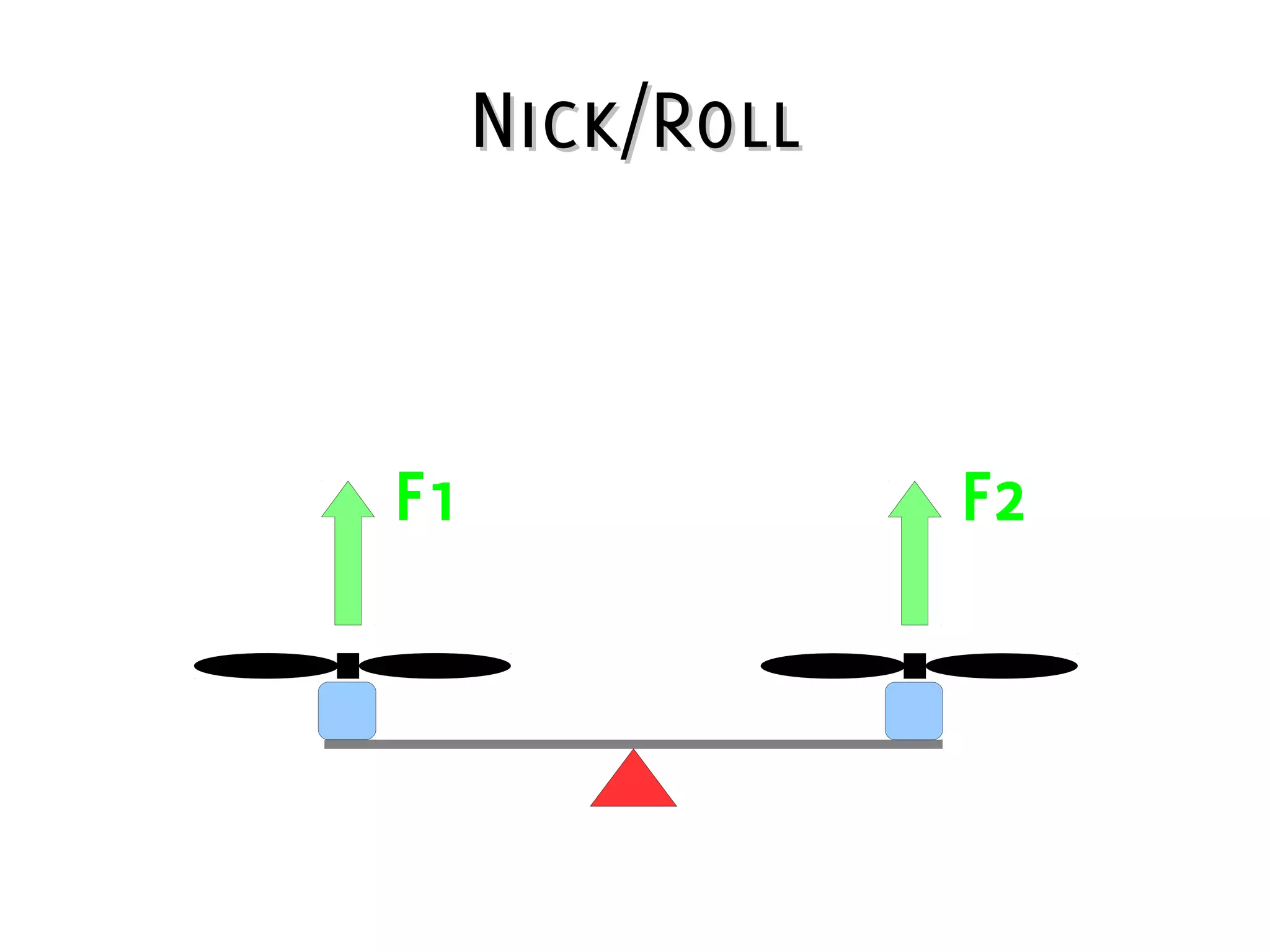
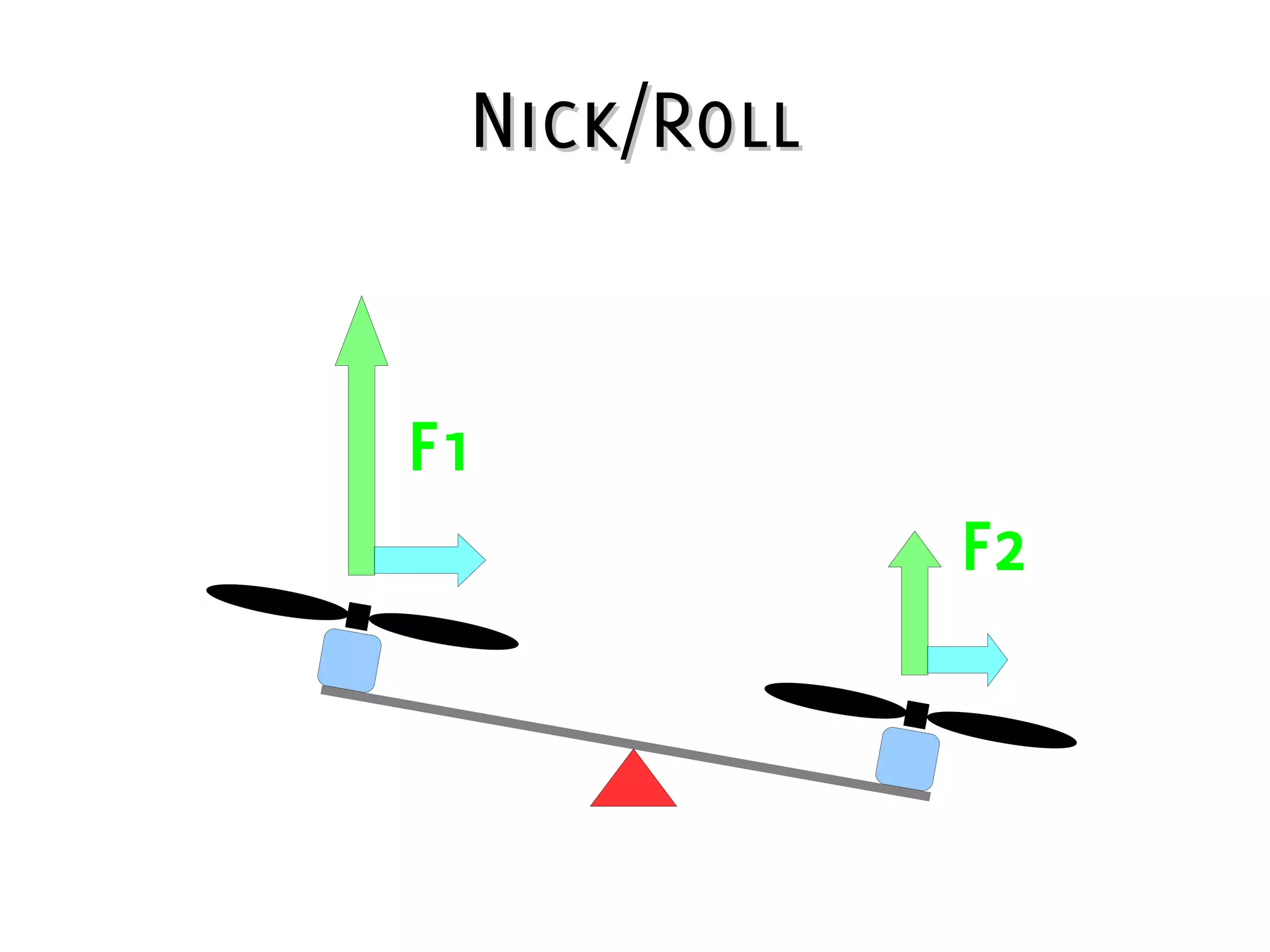
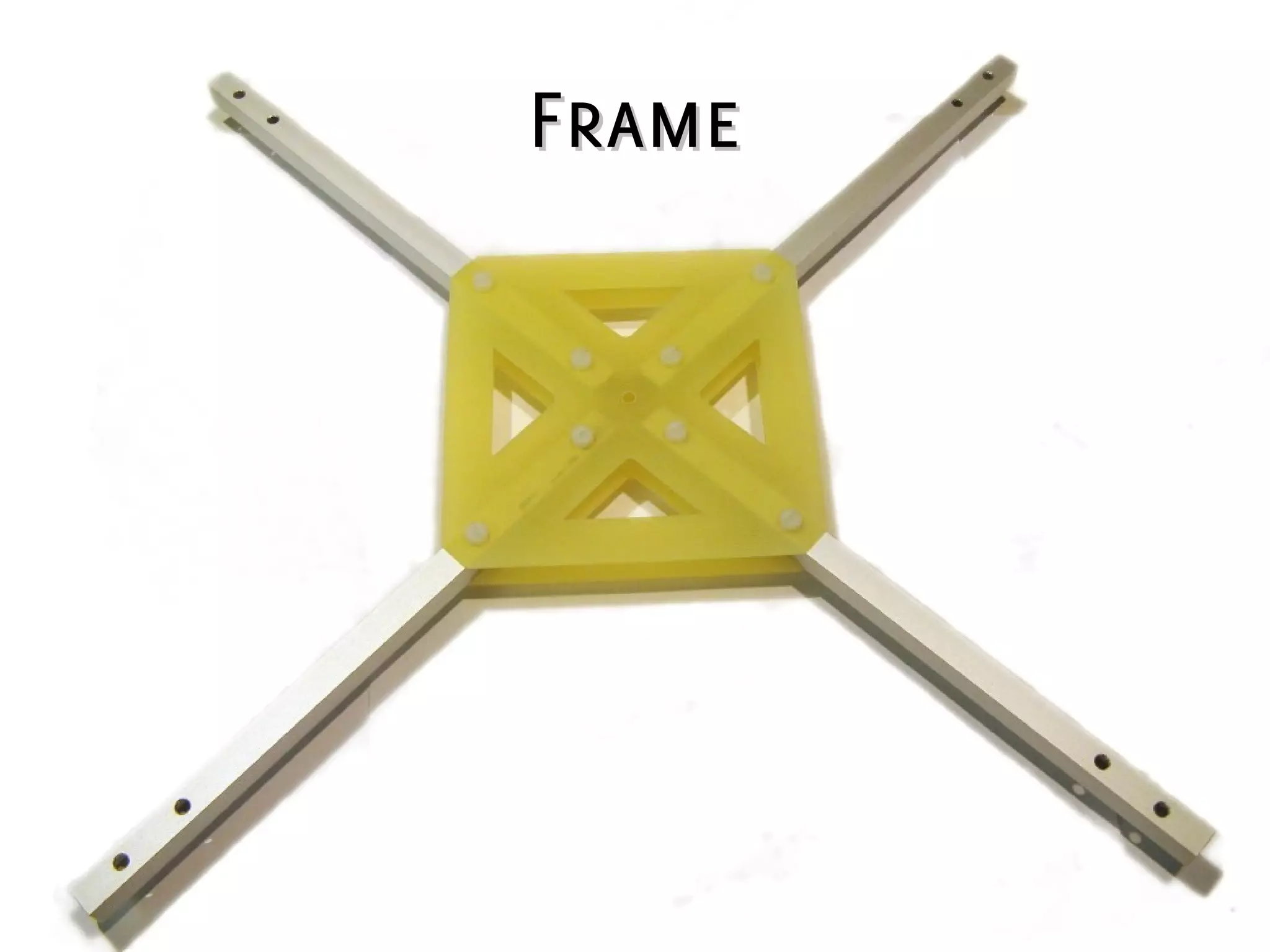


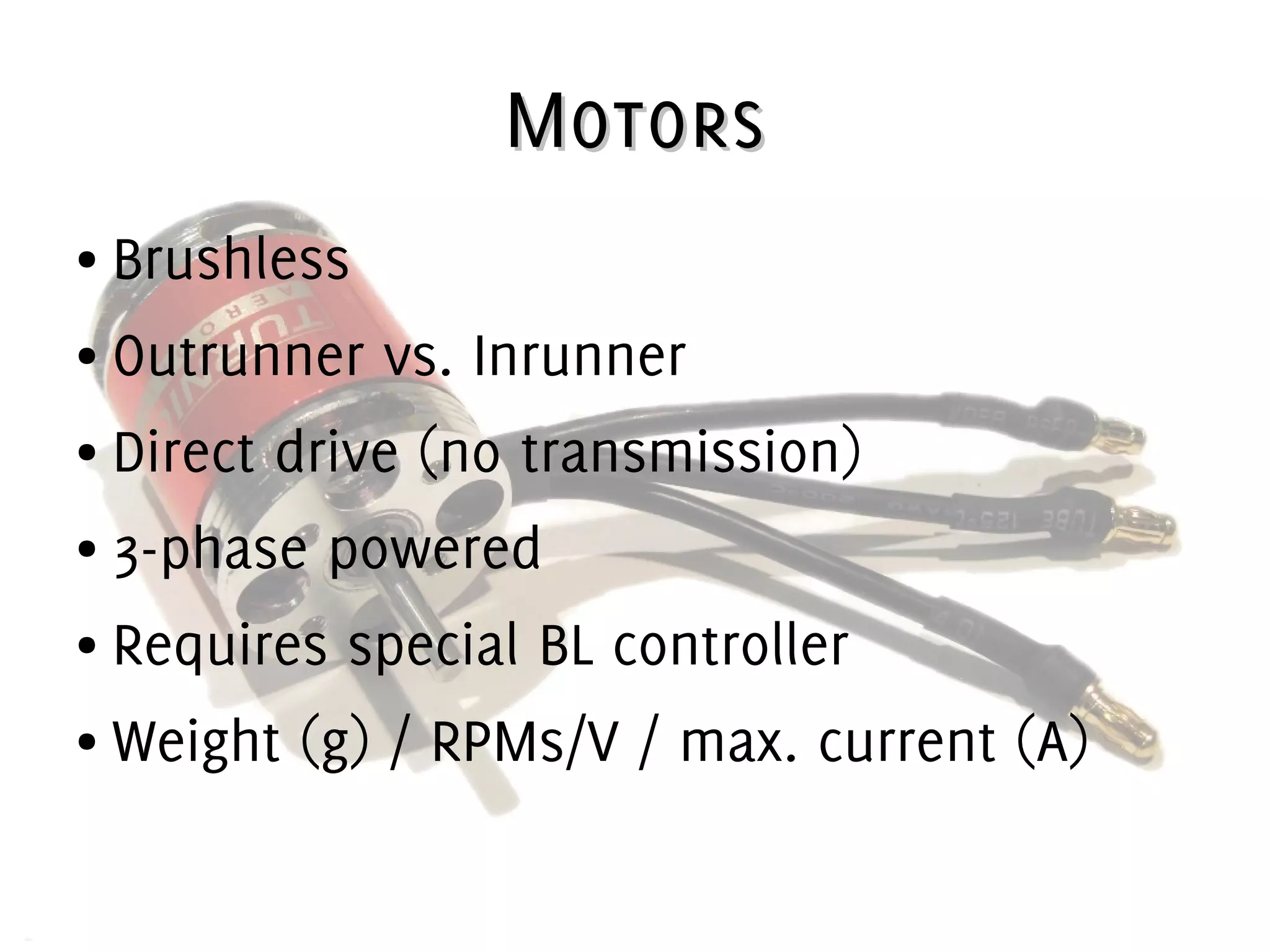
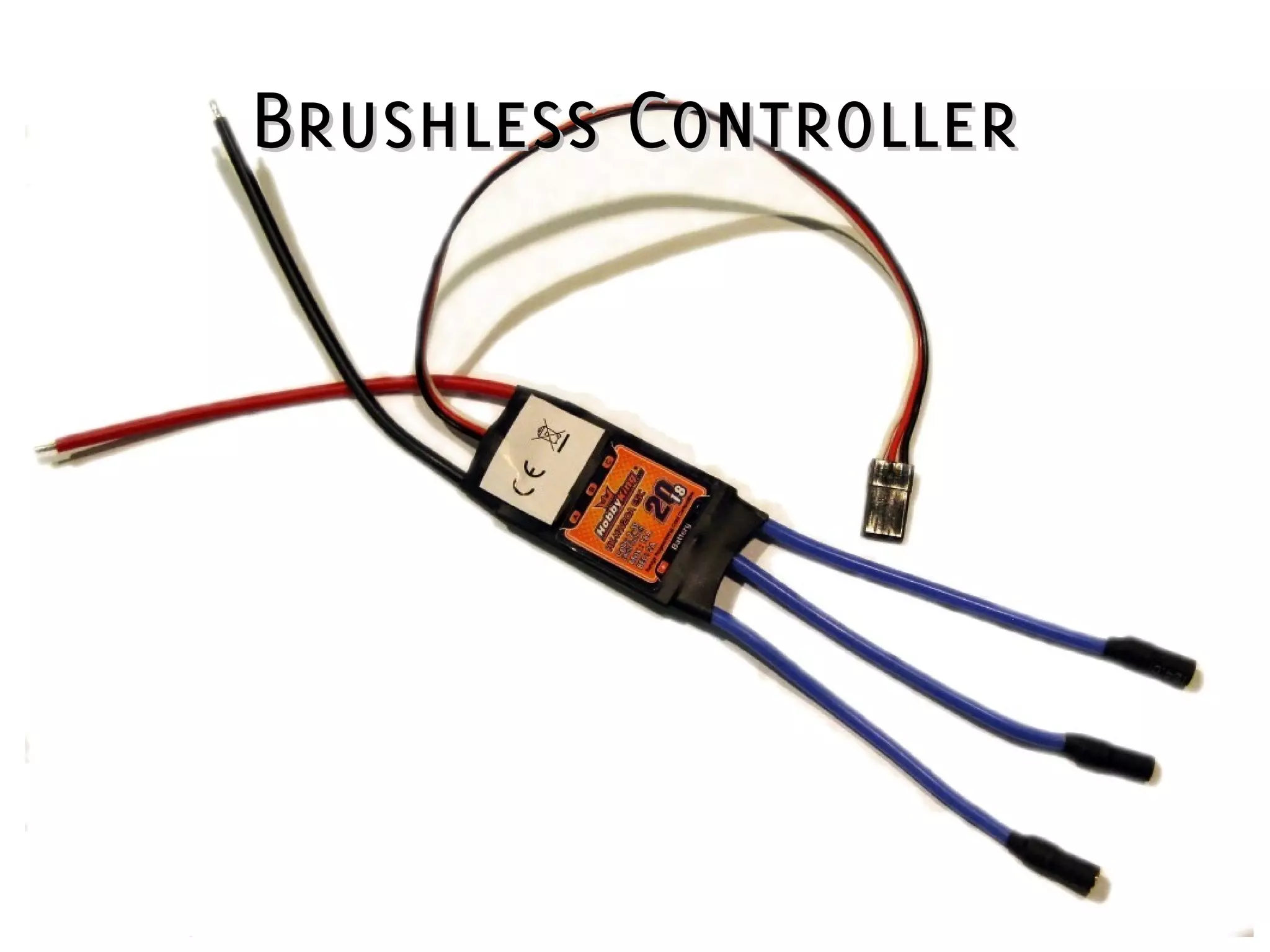
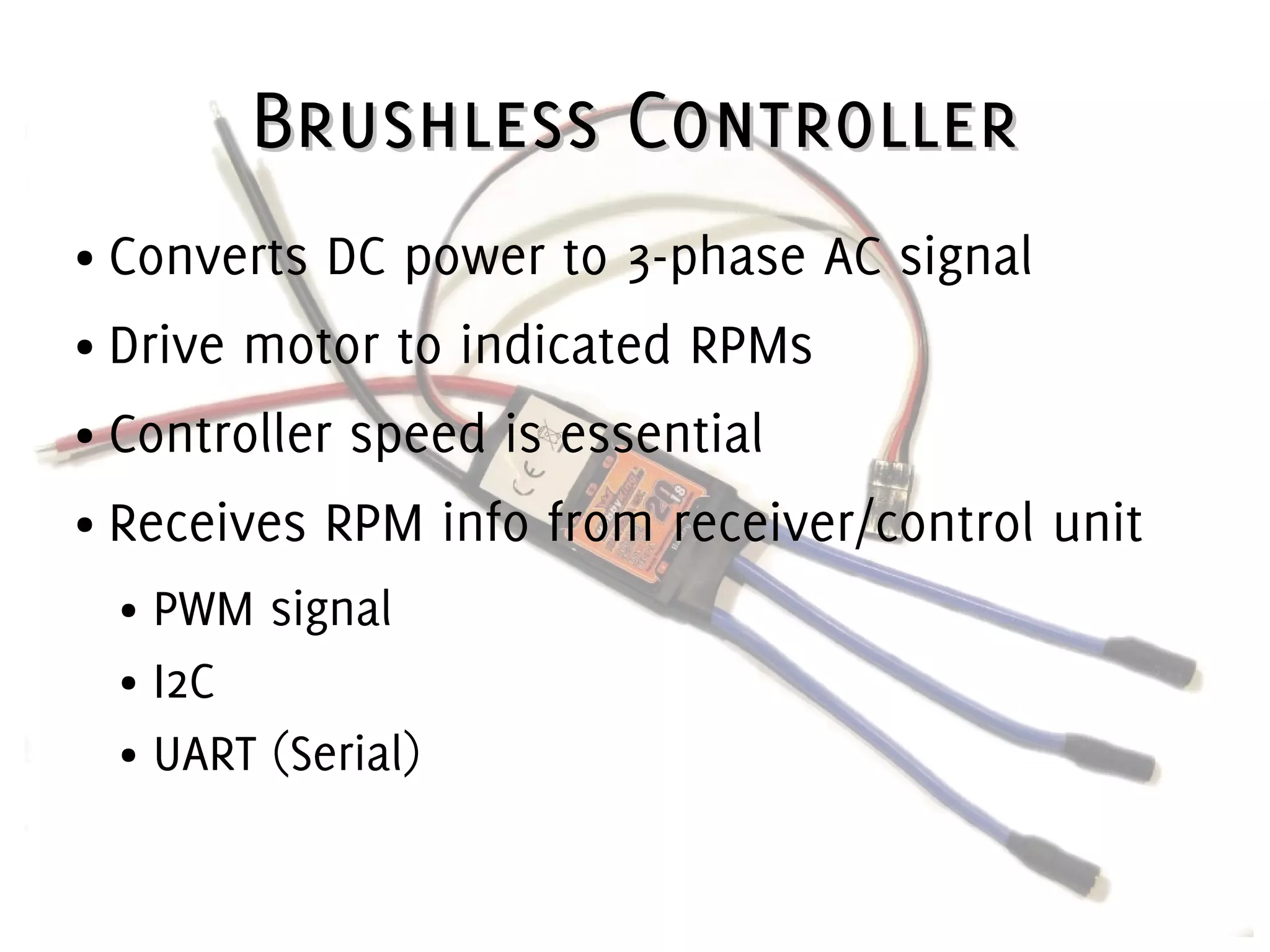
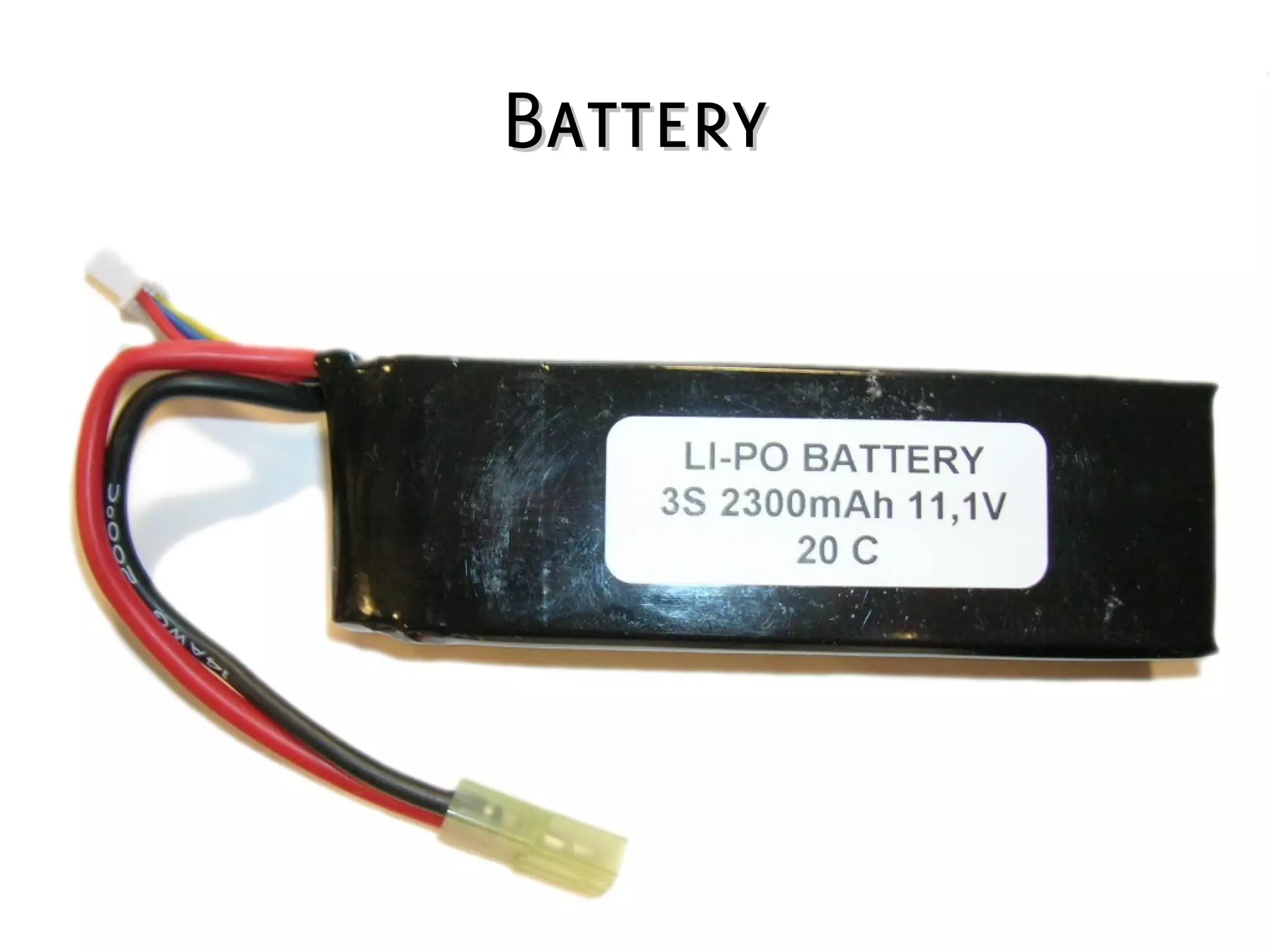
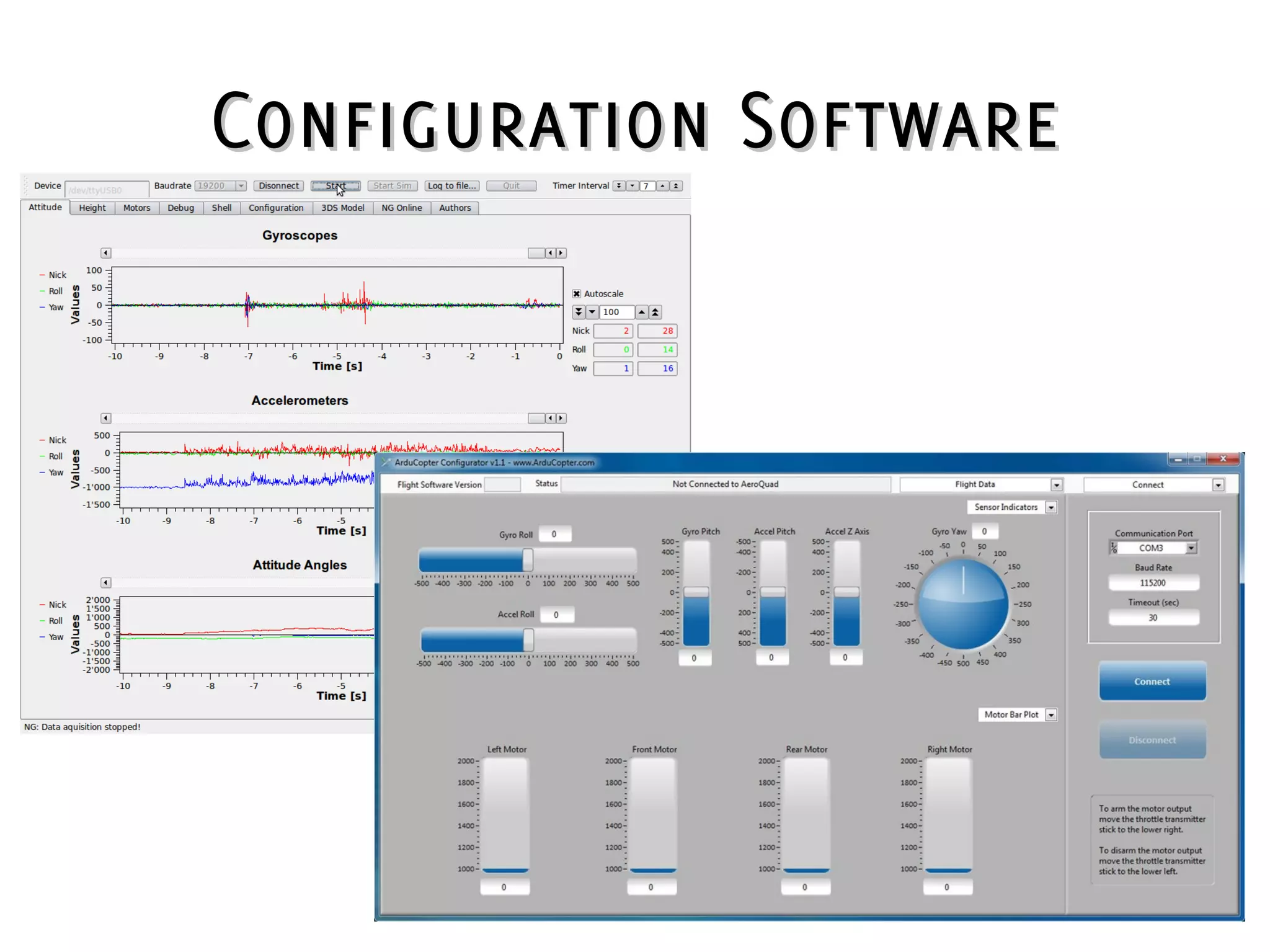

This document provides a comprehensive guide on building a quadrocopter, covering operational theory, building blocks, and practical tips. It details the necessary components such as motors, batteries, and controllers, as well as the physics involved in flight dynamics. Additionally, it includes references for further reading and legal considerations for operation.