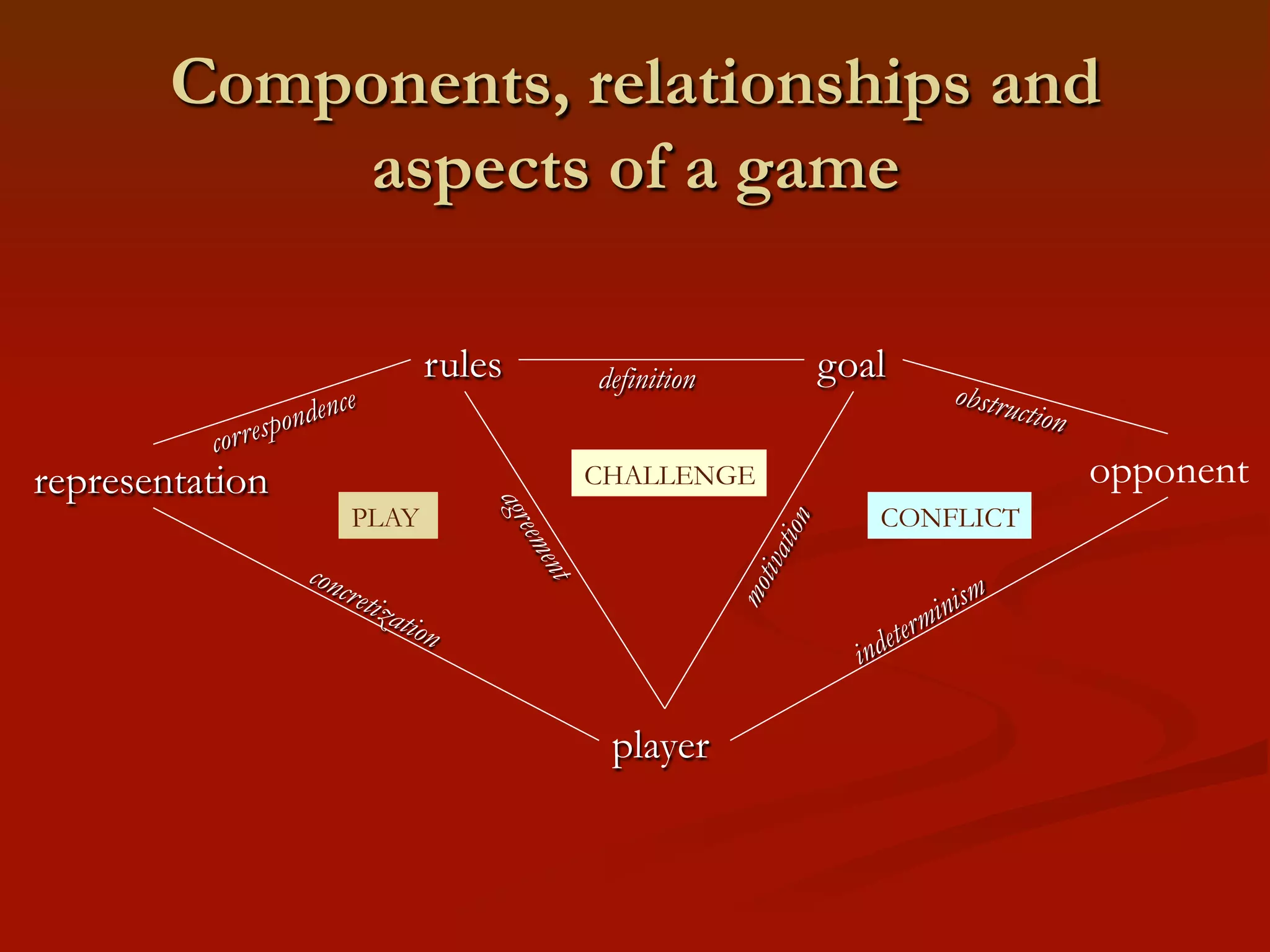
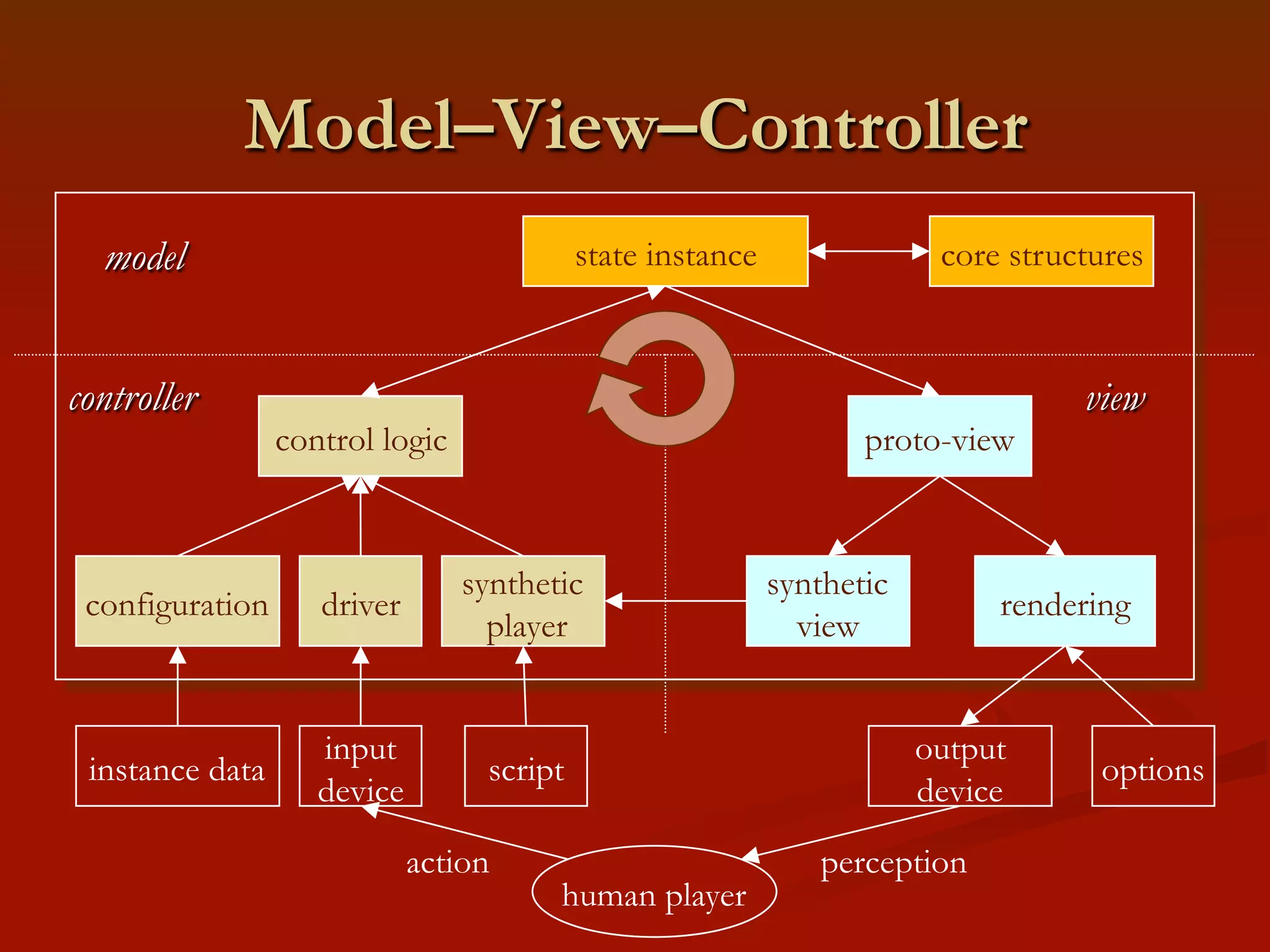
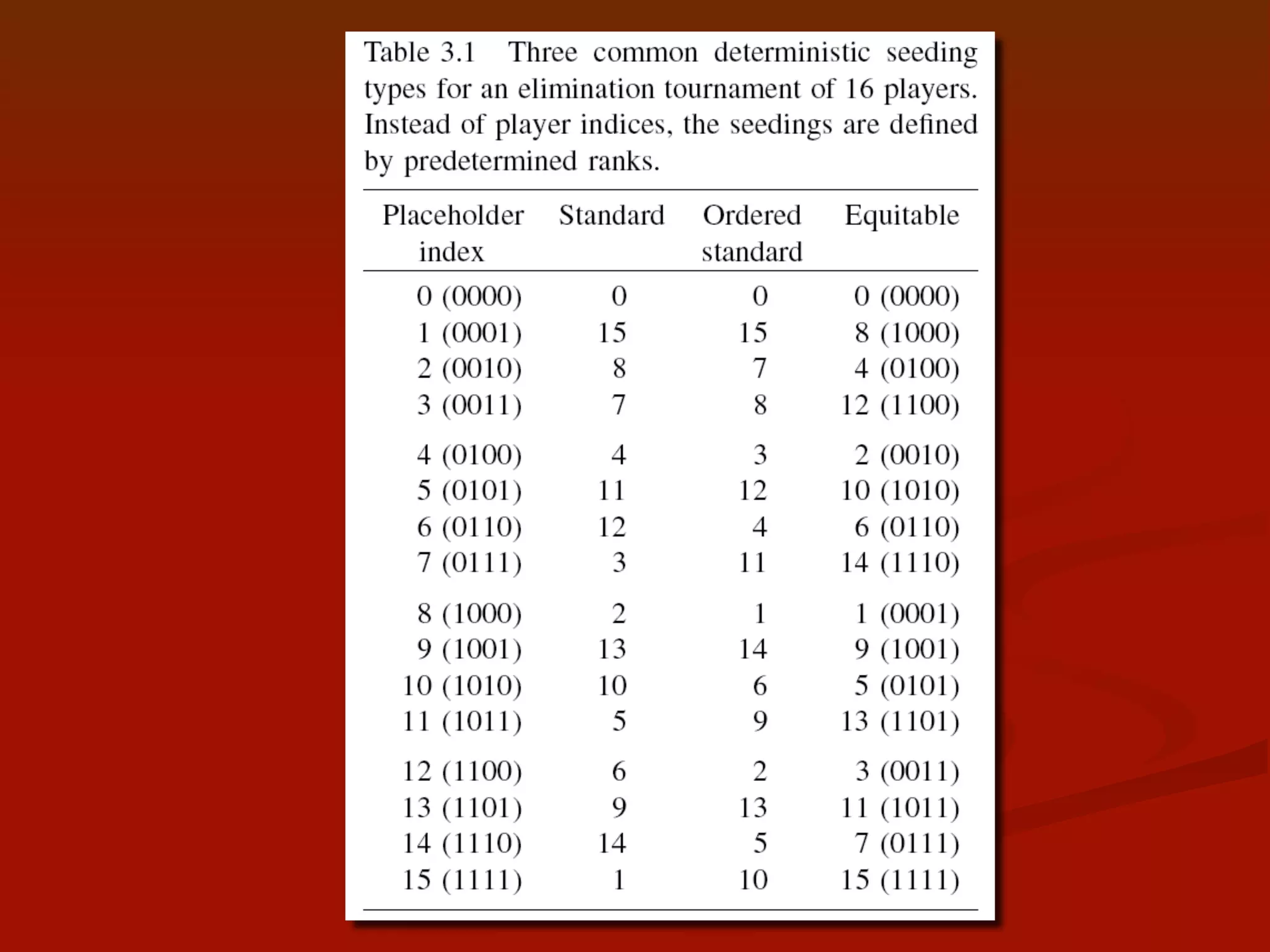
The document outlines a course on algorithms for computer games, covering topics such as game design, programming principles, and key algorithms. It provides details on prerequisites, lecture schedules, examination formats, and related follow-up courses. The course aims to offer insights into computer gaming from a computer science perspective and includes elements of game mechanics, storytelling, and random number generation.













![Random shuffling
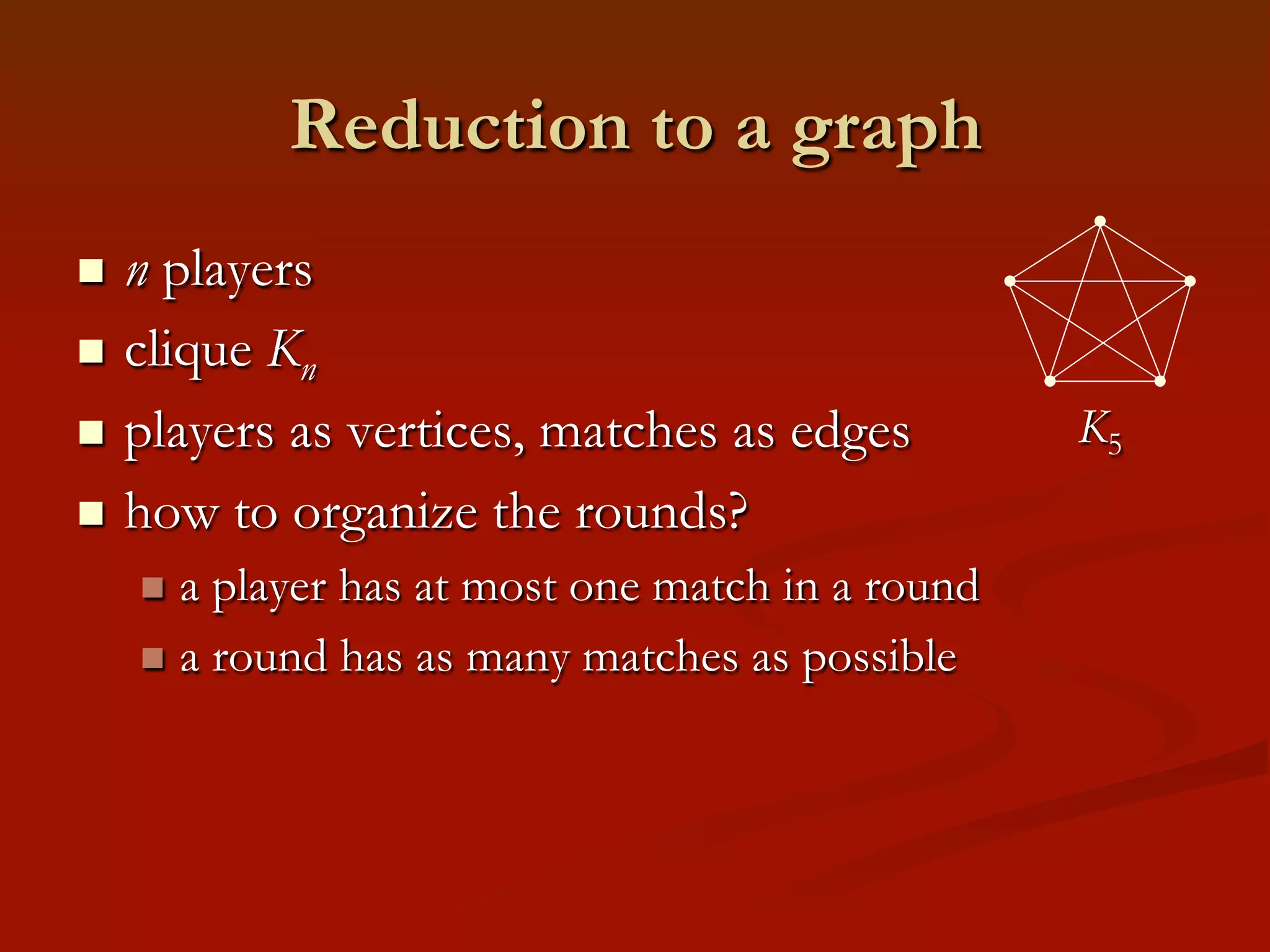
n
n
n
n
generate random permutation, where all permutations
have a uniform random distribution
shuffling ≈ inverse sorting (!)
ordered set S = 〈s1, …, sn〉 to be shuffled
naïve solution
enumerate all possible n! permutations
n generate a random integer [1, n!] and select the corresponding
permutation
n practical only when n is small
n](https://image.slidesharecdn.com/a4cg-131024073508-phpapp01/75/Algorithms-for-Computer-Games-lecture-slides-2009-63-2048.jpg)





























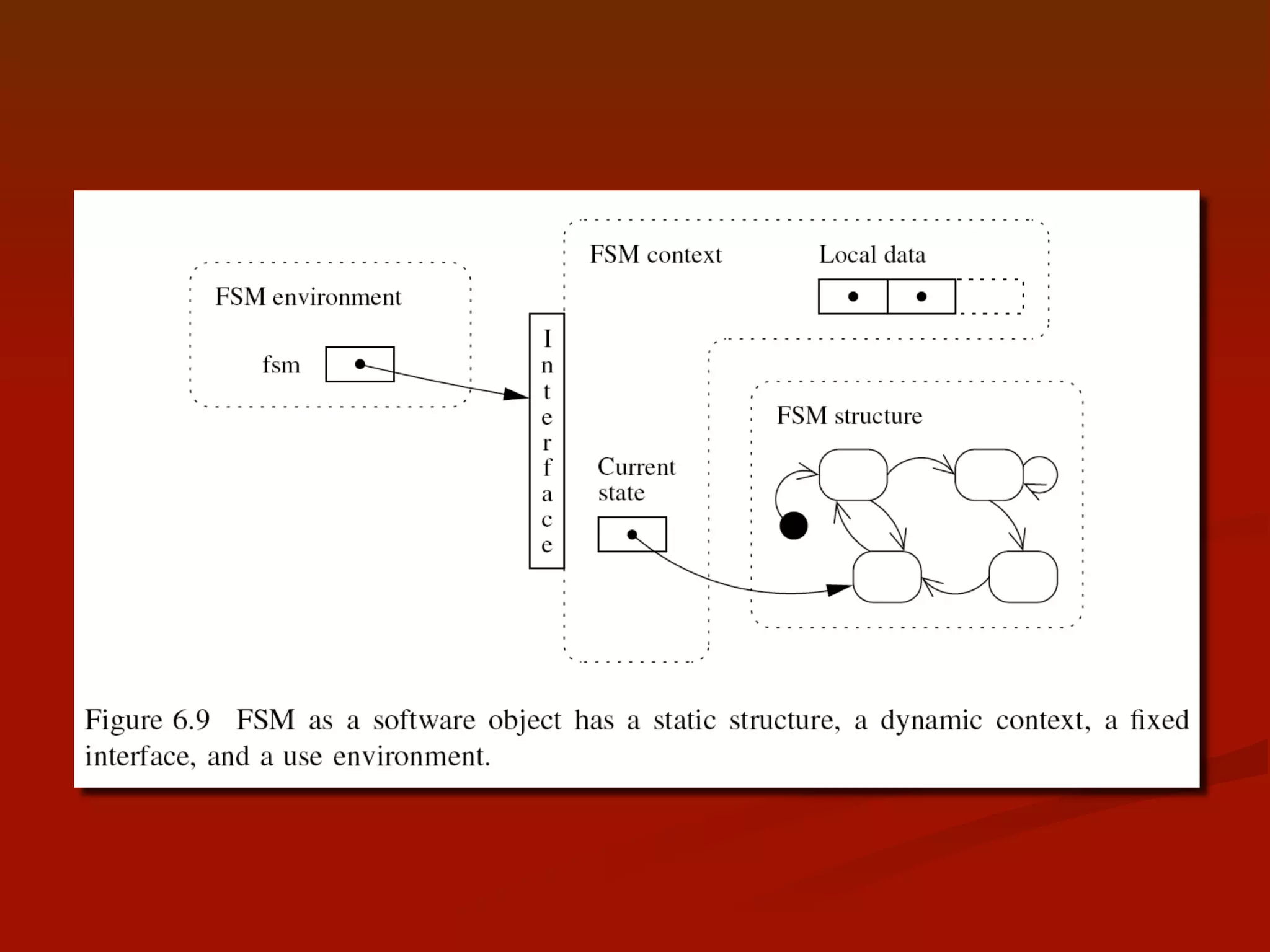






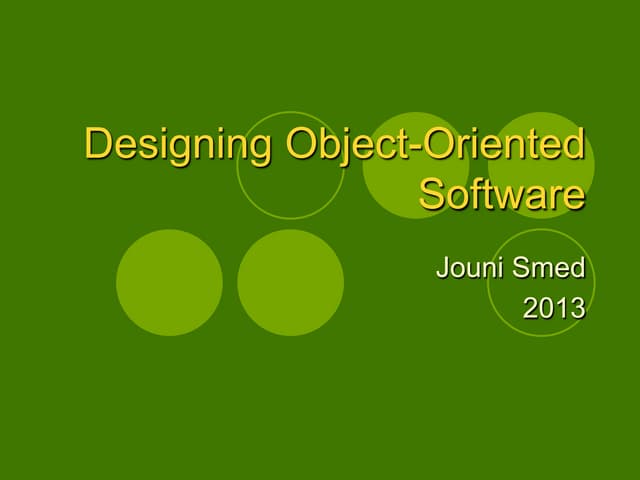
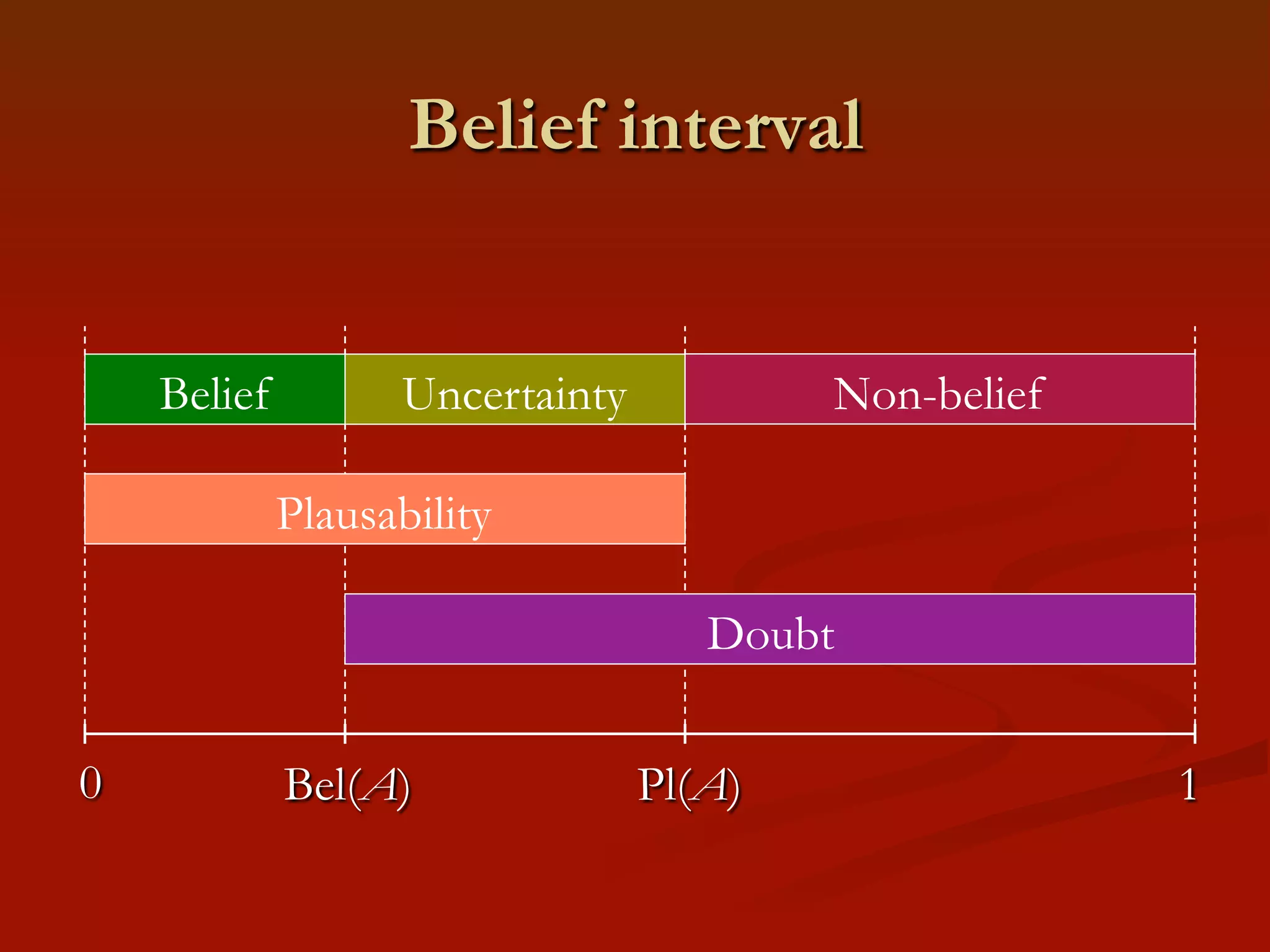
![Dempster-Shafer theory
belief about a proposition as an interval
[ belief, plausability ] ⊆ [ 0, 1]
n belief supporting A: Bel(A)
n plausability of A: Pl(A) = 1 − Bel(¬A)
n Bel(intruder) = 0.3, Pl(intruder) = 0.8
n
n Bel(no
intruder) = 0.2
n 0.5 of the probability range
is indeterminate](https://image.slidesharecdn.com/a4cg-131024073508-phpapp01/75/Algorithms-for-Computer-Games-lecture-slides-2009-253-2048.jpg)



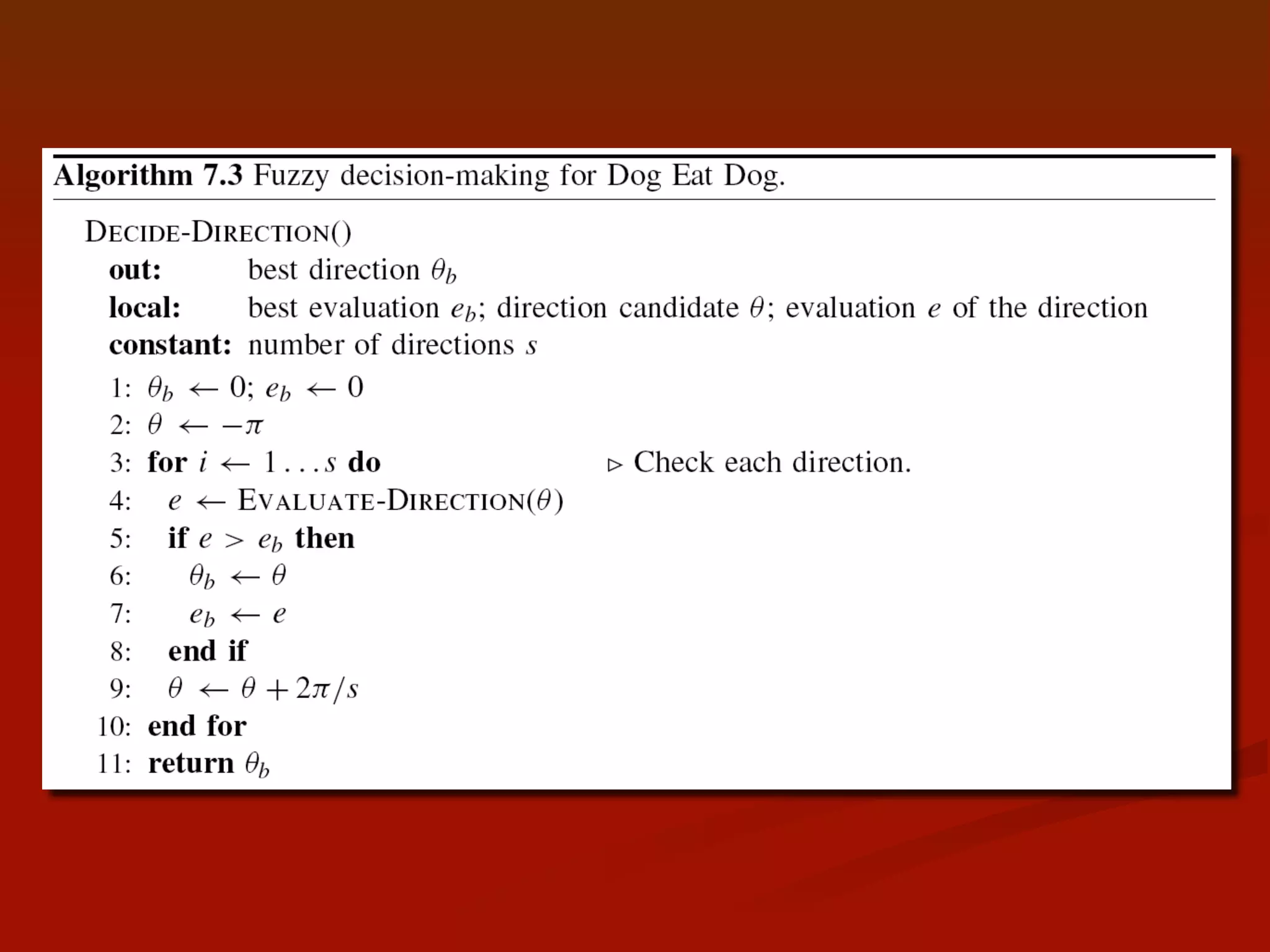
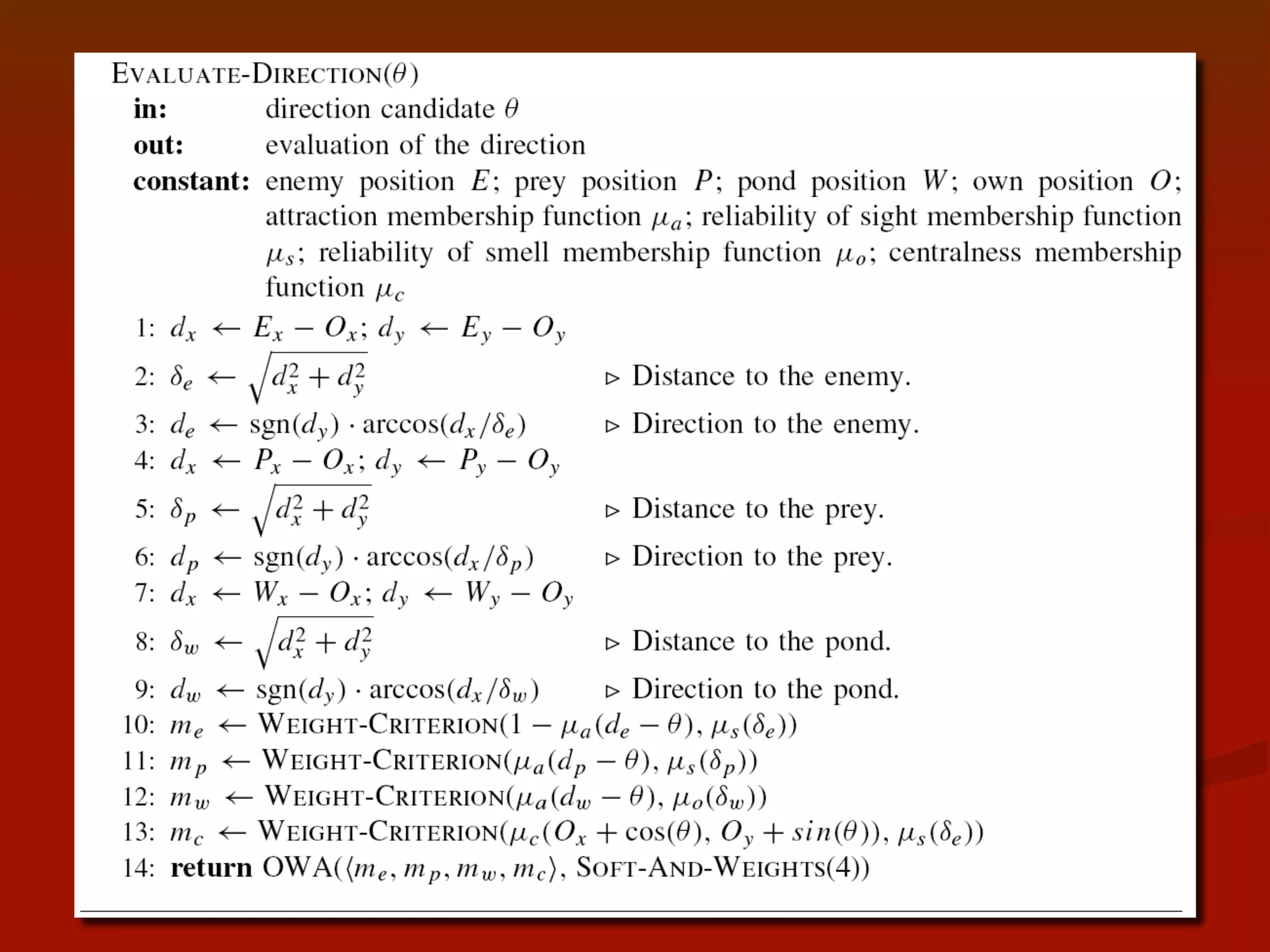
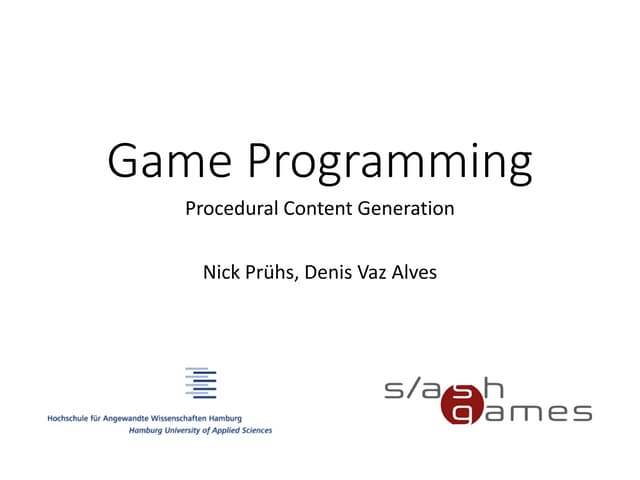
![Dog Eat Dog: Weighting the
criteria importances
n
fuzzy criterion Ci has a weight wi
n
n
[0, 1]
a greater value wi corresponds to a greater importance
the weighted value from the implication wi → Ci
n
n
classical definition (A → B ⇔ ¬A B): min{ (1 − wi ), Ci }
Yager’s weighting scheme: the weighted membership value:
μCw(x) =
⎧ 1, if μ(x) = 0 and w = 0
⎨
⎩ (μC(x))w, otherwise](https://image.slidesharecdn.com/a4cg-131024073508-phpapp01/75/Algorithms-for-Computer-Games-lecture-slides-2009-278-2048.jpg)
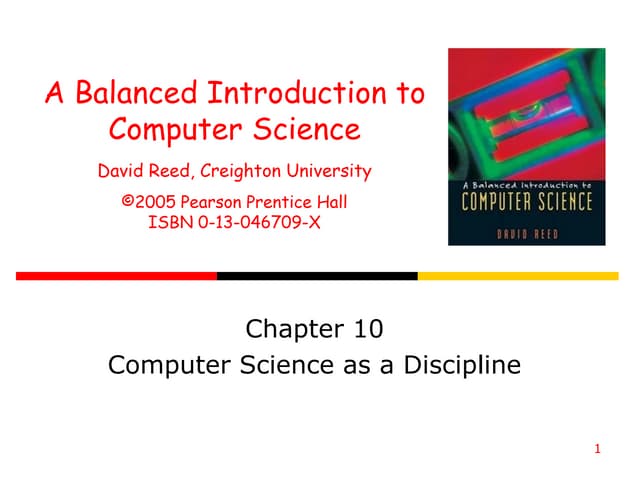
![Ordered weighted averaging
(OWA)
n
weight sequence W = (w0, w1,…,wn – 1)T
n
n
F(a0, a1,…,an – 1) = Σwjbj
n
n
bj is the (j+1)th largest element of the sequence
A = 〈a0, a1,…,an – 1〉
by setting the weight sequence we can get
n
n
n
n
∀wi ∈ [0, 1] and Σwi = 1
conjunction: W = { 0, 0,…, 1} = min{A}
disjunction: W = { 1, 0,…, 0} = max{A}
average: W = {1/n, 1/n,…, 1/n}
soft-and operator: wi = 2(i + 1) / (n(n + 1))
n
example: n = 4, W = { 0.1, 0.2, 0.3, 0.4 }](https://image.slidesharecdn.com/a4cg-131024073508-phpapp01/75/Algorithms-for-Computer-Games-lecture-slides-2009-280-2048.jpg)