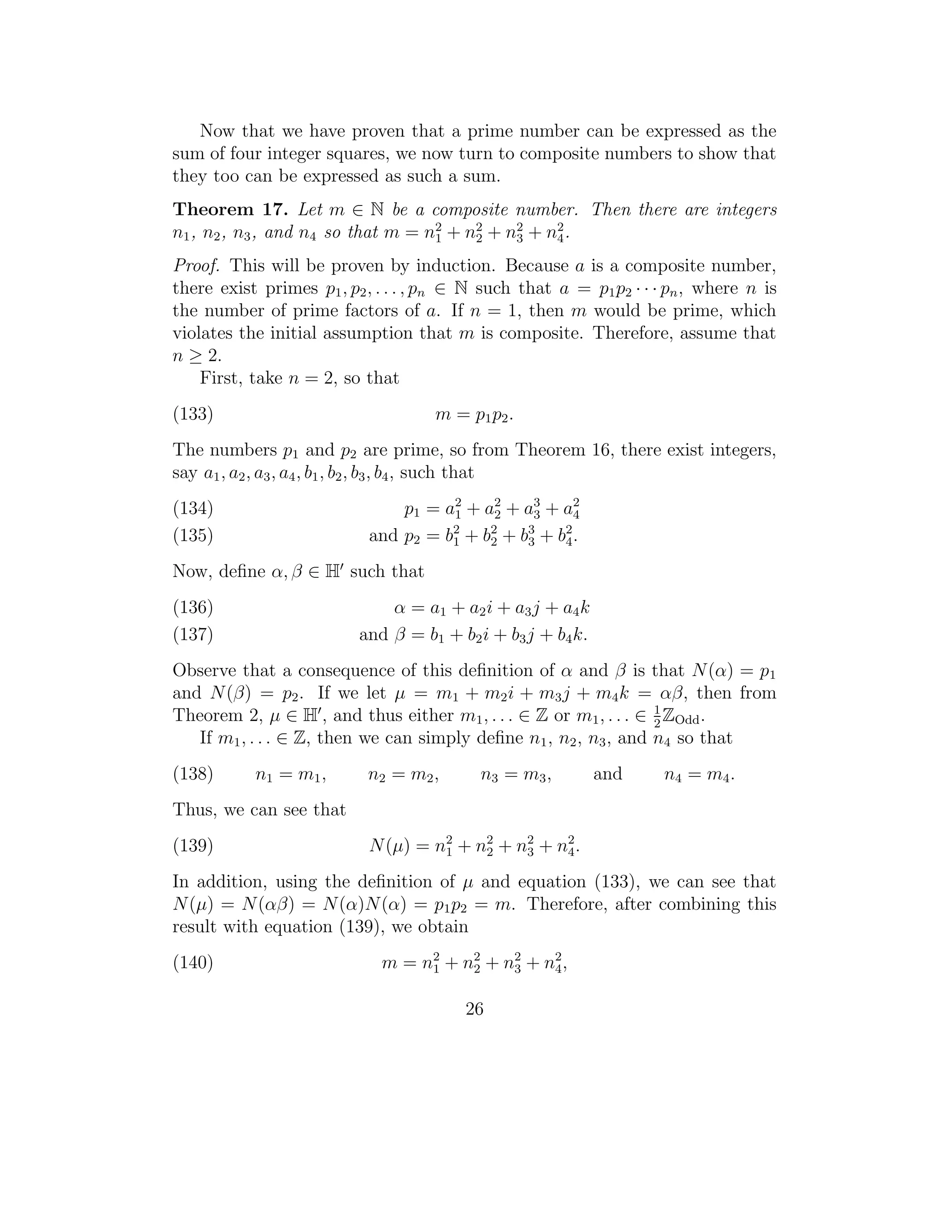
This document provides an introduction and overview of a paper that will prove Lagrange's Four Square Theorem using quaternion algebras. It will introduce quaternion arithmetic and show that the set of quaternions being considered forms a non-commutative ring. This will allow the author to eventually prove that every positive integer can be expressed as the sum of four integer squares.



![multiplication and the results of equations (18) through (24), we can see that
the product αβ can also be written in the form of equation (17). Therefore,
αβ is an integer quaternion, and H is indeed closed under multiplication.
Since we have shown that H is closed under addition and multiplication,
we will now show that H is a non-commutative ring.
Theorem 3. H is a non-commutative ring.
Proof. If we say that α, β, and γ are of the form
(25) α = (a1 , a2 , a3 , a4 ),
(26) β = (b1 , b2 , b3 , b4 ),
(27) and γ = (c1 , c2 , c3 , c4 ),
we can then show that each of the seven conditions for a non-commutative
ring hold.
For all α, β ∈ H , we see from the definition of addition that
α + β = (a1 , a2 , a3 , a4 ) + (b1 , b2 , b3 , b4 )
= (a1 + b1 , a2 + b2 , a3 + b3 , a4 + b4 )
(28) = (b1 + a1 , b2 + a2 , b3 + a3 , b4 + a4 )
= (b1 , b2 , b3 , b4 ) + (a1 , a2 , a3 , a4 )
= β + α.
Thus, the commutative law of addition holds.
For all α, β, γ ∈ H , we see from the definition of addition that
(α + β) + γ = [(a1 , a2 , a3 , a4 ) + (b1 , b2 , b3 , b4 )] + (c1 , c2 , c3 , c4 )
= (a1 + b1 , a2 + b2 , a3 + b3 , a4 + b4 ) + (c1 , c2 , c3 , c4 )
= (a1 + b1 + c1 , a2 + b2 + c2 , a3 + b3 + c3 , a4 + b4 + c4 )
(29)
= ((a1 , a2 , a3 , a4 ) + (b1 + c1 , b2 + c2 , b3 + c3 , b4 + c4 )
= ((a1 , a2 , a3 , a4 ) + [(b1 , b2 , b3 , b4 ) + (c1 , c2 , c3 , c4 )]
= α + (β + γ).
Thus, the associative law of addition holds.
It is clear that (0, 0, 0, 0) ∈ H . For all α ∈ H ,
(30) (0, 0, 0, 0) + α = (0 + a1 , 0 + a2 , 0 + a3 , 0 + a4 ) = (a1 , a2 , a3 , a4 ) = α.
5](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-5-2048.jpg)
![Thus there exists an element which is an additive identity.
Since (a1 , a2 , a3 , a4 ∈ H , then (−a1 , −a2 , −a3 , −a4 ) ∈ H . We can see that
(a1 , a2 , a3 , a4 ) + (−a1 , −a2 , −a3 , −a4 ) = (a1 − a1 , a2 − a2 , a3 − a3 , a4 − a4 ) =
(0, 0, 0, 0), so H has an additive inverse for all α ∈ H .
For all α, β, γ ∈ H , we can see from the definition of multiplication that
(αβ)γ = α(βγ), so multiplication in H is associative.
The element (1, 0, 0, 0) is in the set H , and from the definition of multi-
plication, we see that for all α ∈ H ,
(31) (1, 0, 0, 0)α = (1, 0, 0, 0)(a1 , a2 , a3 , a4 ) = (a1 , a2 , a3 , a4 ) = α
and
(32) α(1, 0, 0, 0) = (a1 , a2 , a3 , a4 )(1, 0, 0, 0) = (a1 , a2 , a3 , a4 ) = α.
Thus H includes an element which is a multiplicative identity.
If α, β, γ ∈ H , then α(β + γ) = α(b1 + c1 , b2 + c2 , b3 + c3 , b4 + c4 ), which
we can see from the definition of multiplication gives (a1 b1 + a1 c1 , a2 b2 +
a2 c2 , a3 b3 + a3 c3 , a4 b4 + a4 c4 ), and thus multiplication is distributive.
Therefore, each of the seven laws necessary for the set H to be a non-
commutative ring hold.
Now that various arithmetic properties of quaternions have been estab-
lished (namely, the definitions of addition and multiplication for quaternions
and the fact that the integer quaternions are closed under addition and mul-
tiplication and form a non-commutative ring), we can now begin to develop
certain intermediate theorems about quaternions which will help us in our
quest to prove Lagrange’s Theorem.
2 Quaternion Norms
The norm is an important concept in other number systems like Z[i]. Here
we draw on many of the ideas from such number systems in order to develop
the idea of a norm for quaternions.
The first idea we will borrow from other number systems is that of the
conjugate. Recall that in C, the number (a + bi) had a conjugate, namely,
(a − bi). We define something similar for quaternions.
Definition. Let α = a1 + a2 i + a3 j + a3 k. Then α = a − a1 i − a2 j − a3 k is
¯
the conjugate of α.
6](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-6-2048.jpg)
![Note, that it is clear if α ∈ H , then α ∈ H . Thus, armed knowing how to
¯
form the conjugate of a quaternion, we can define the norm of a quaternion
in the same way as number systems like Z[i] or C.
Definition. For any quaternion α, N (α) = αα is the norm of α.
¯
Lemma 1. Let α = a1 + a2 i + a3 j + a4 k. Then
(33) N (α) = αα = αα = a1 + a2 + a2 + a2 .
¯ ¯ 2
2 3 4
Proof. If α = a1 + a2 i + a3 j + a4 k, then α = a1 − a2 i − a3 j − a4 k and
¯
N (α) = αα. From the definition of multiplication,
¯
(34) αα = (a1 + a2 i + a3 j + a4 k)(a1 − a2 i − a3 j − a4 k) = c1 + c2 i + c3 j + c4 k,
¯
where
c1 = a1 a1 − a2 (−a2 ) − a3 (−a3 ) − a4 (−a4 ) = a1 + a2 + a3 + a4 ,
2
2
2 2
c2 = a1 (−a2 ) + a2 a1 + a3 (−a4 ) − a4 (−a3 ) = 0,
(35)
c3 = a1 (−a3 ) − a2 (−a4 ) + a3 a1 + a4 (−a2 ) = 0,
c4 = a1 (−a4 ) + a2 (−a3 ) − a3 (−a2 ) + a4 a1 = 0.
Substituting the results of equation (35) into equation (34), we obtain
(36) α α = a 2 + a2 + a2 + a2 .
¯ 1 2 3 4
Similarly, we see that
(37) αα = (a1 − a2 i − a3 j − a4 k)(a1 + a2 i + a3 j + a4 k) = c1 + c2 i + c3 j + c4 k,
¯
where
c1 = a1 a1 − (−a2 )a2 − (−a3 )a3 − (−a4 )a4 = a2 + a2 + a2 + a2 ,
1
2
3 4
c2 = a1 a2 + (−a2 )a1 + (−a3 )a4 − (−a4 )a3 = 0,
(38)
c3 = a1 a3 − (−a2 )a4 + (−a3 )a1 + (−a4 )a2 = 0,
c4 = a1 b4 + (−a2 )a3 − (−a3 )a2 + (−a4 )a1 = 0.
After substituting the results of equation (38) into equation (37), we again
obtain
(39) α α = a 2 + a2 + a2 + a2 .
¯ 1 2 3 4
Therefore,
(40) N (α) = αα = αα = a2 + a2 + a2 + a2 .
¯ ¯ 1 2 3 4
7](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-7-2048.jpg)

![By simple algebraic manipulation, we can transform equation (51) as
c1 = b 1 a1 − b 2 a2 − b 3 a3 − b 4 a4 = a 1 b 1 − a 2 b 2 − a 3 b 3 − a 4 b 4 ,
c2 = −b1 a2 − b2 a1 + b3 a4 − b4 a3 = −a1 b2 − a2 b1 − a3 b4 + a4 b3 ,
(52)
c3 = −b1 a3 − b2 a4 − b3 a1 + b4 a2 = −a1 b3 + a2 b4 − a3 b1 − a4 b2 ,
c4 = −b1 a4 + b2 a3 − b3 a2 − b4 a1 = −a1 b4 − a2 b3 + a3 b2 − a4 b1 .
Notice that this makes
(53) c1 = c 1 , c2 = −c2 , c3 = −c3 , and c4 = −c4 .
Substituting equation (53) into equation (50), we find that
(54) αβ = c1 − c2 i − c3 j − c4 k.
From equations (45) and (54), it is clear that
(55) ¯¯
αβ = β α.
Now our desired property of the norm, that N (αβ) = N (α)N (β), follows
easily from Lemma 3.
Lemma 4. Let α and β be quaternions. Then N (αβ) = N (α)N (β).
¯¯
Proof. N (αβ) = αβαβ = αβ β α = αN (β)¯ = ααN (β) = N (α)N (β).
α ¯
3 Quaternion Units
We now turn to units, an idea which as a place in nearly every number system
imaginable. In N, 1 is a unit, in Z, 1 and −1 are units, and in Z[i], there are
four units: 1, −1, i, and −i, and in Zp , every element is a unit. Yet, despite
the existence of different units in different number systems, the definition of
a unit remains the same in each. We will take this same definition and apply
it to quaternions.
Definition. We say ε ∈ H is a unit if there is a quaternion α ∈ H so that
εα = αε = 1.
10](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-10-2048.jpg)
![In number systems which have the concept of a norm, such as Z[i], a unit
u has the property that N (u) = 1. To show this is true for quaternions, we
must first define the inverse of a quaternion.
Definition. Suppose α is nonzero and α ∈ H . Then there exists α−1 , called
the inverse of α, so that
α¯
(56) α−1 = .
N (α)
We saw that for a quaternion α ∈ H , it had a conjugate α ∈ H and a
¯
norm N (α) ∈ Z. Thus we can see that it has an inverse α−1 ∈ HQ . However,
if you know that N (α) = 1, then α−1 = α, so α−1 ∈ H . This fact is the
¯
gateway for our discussion of units.
Lemma 5. α is a unit if and only if N (α) = 1.
Proof. From equations (33) and (56), we see
αα¯ N (α)
(57) αα−1 = = =1
N (α) N (α)
and
αα
¯ N (α)
(58) α−1 α = = = 1.
N (α) N (α)
It is here we see that α and α−1 are both units. Now we can take the norm
of both sides of equation (57) or (58) to obtain
(59) N (αα−1 ) = N (1),
which we know is
(60) N (α)N (α−1 ) = 1.
It appears that the only solution to equation (60) is N (α) = N (α −1 ) = 1,
but to be sure, we can use our definition of inverse and norm to see
α¯ α¯ α N (α)
(61) N (α−1 ) = N = = = 1.
N (α) N (α) N (α) N (α)
From equations (60) and (61), we see that if N (α−1 ) = 1, then N (α) = 1
as well. Therefore, it is indeed the case that α is a unit if and only if
N (α) = 1.
11](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-11-2048.jpg)
![Since we know that α ∈ H must have coordinates in either the set Z or
1
Z ,
2 Odd
it would seem reasonable to conjecture that there are only a finite
number of units. Thus we will now take a moment to examine exactly how
many quaternions are units in H , and also what they are.
Theorem 4. There are 24 units in H .
Proof. Say α = a1 + a2 i + a3 j + a4 k and α ∈ H . From Lemma 5, if α
is a unit, then N (α) = 1. Since α ∈ H , then either a1 , a2 , a3 , a4 ∈ Z or
a1 , a2 , a3 , a4 ∈ 1 ZOdd .
2
If a1 , a2 , a3 , a4 ∈ Z, then we know a2 , a2 , a2 , a2 ∈ N∪{0}. Since N (α) = 1,
1 2 3 4
then we can see that one out a1 , a2 , a3 , and a4 must equal ±1, while the
other three must equal 0. This provides for a total 8 possible units.
On the other hand, if a1 , a2 , a3 , a4 ∈ 1 ZOdd , then we can observe that
2
a1 , a2 , a2 , a2 ∈ 1 ZOdd . If N (α) = 1, then the only solution of fourths of odd
2
2 3 4 4
integers comes when a2 = a2 = a2 = a2 = 1 . Thus, a1 = ± 1 , a2 = ± 1 ,
1 2 3 4 4 2 2
a3 = ± 1 , and a4 = ± 1 . These values for a1 , a2 , a3 , and a4 present 16
2 2
possible units.
Therefore, we have 8 units when the coordinates of the units are integers
and 16 units when the coordinates are non-integers, for a total of 24 different
units in H .
Now knowing the coordinates of all 24 units, we immediately reach the
following corollary.
Corollary 1. The units in H are:
1
±1, ±i, ±j, ±k, and 2
(±1 ± i ± j ± k).
Another concept for quaternions which we will borrow from other num-
ber systems is the associate. The following definition for the associate of
a quaternion is identical to the definition for associates in number systems
such as Z[i].
Definition. Let α be a quaternion. If ε ∈ H is a unit, then εα and αε are
called associates of α. If β = εα, then it is said that β associates α and
written β ∼ α.
We will now prove four lemmas which will be immensely helpful in many
of the more difficult proofs which lay ahead.
12](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-12-2048.jpg)
![so
(74) β = α.
From the definition of equal quaternions, the coordinates of β are the same
as those of α, and thus β ∈ HZ and β ∼ α.
The other case is when a1 , a2 , a3 , a4 ∈ 1 ZOodd . Through simple algebra,
2
we can manipulate the terms of α into the form δ + γ, where
(75) δ = d1 + d2 i + d3 j + d4 k, di ∈ ZEven , and γ = 1 (±1 ± i ± j ± k),
2
so that
(76) α = δ + γ.
From Corollary 1, we know γ is a unit, as is γ , so
¯
(77) γ¯ = 1.
γ
Because each of d1 , d2 , d3 , and d4 are even, according to the definition of
multiplication, the coordinates of δ¯ will be integers. Since γ is a unit, by
γ ¯
taking β = α¯ , it is plain that β ∼ α. It follows from equation (76) that
γ
(78) β = α¯ = (δ + γ)¯ = δ¯ + γ¯ .
γ γ γ γ
Therefore, because δ¯ has integer coordinates and γ¯ = 1, the coordinates
γ γ
of δ¯ + γ¯ , and thus β, are integers. Therefore, β ∼ α and β ∈ HZ .
γ γ
We have seen that norms, units, and associates of quaternions have near-
identical definitions to their counterparts living in number systems like Z[i].
In the area of divisors, however, quaternions begin to distinguish themselves
from these other number systems. This is due to the fact that, unlike for the
Gaussian integers, multiplication of quaternions is not commutative. Natu-
rally then, it makes sense that division in H differs from division in Z[i].
Definition. If α, β, γ ∈ H and γ = αβ, then we say α is a left-hand divisor
of γ and write α γ, and that β is a right-hand divisor of γ and write β γ.
The distinction between left- and right-hand divisors is necessary because,
in general, αβ = βα. As we saw earlier, multiplication is not commutative.
For the purposes of this paper, we will work with right-hand divisors, but
15](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-15-2048.jpg)
![Armed with Theorem 6, we now look to prove the existence of a full-
fledged division algorithm for H.
Theorem 7 (Division Algorithm). Suppose α, β ∈ H , and β = 0, then
there are lambda, γ ∈ H so that
(86) α = λβ + γ, with 0 ≤ N (γ) < N (β).
Proof. Define κ ∈ H and m ∈ N such that
(87) ¯
κ = αβ and m = N (β).
From Theorem 6, we know there exists λ ∈ H such that N (κ − mλ) < m2 .
Now, using such a λ derived from Theorem 6, define γ as
(88) γ − λβ.
This satisfies α = δβ + from equation (86). From the definitions of κ and
m, we see that
(89) ¯ ¯ ¯
(α − λβ)β = αβ − λβ β = κ − mλ,
so thus
(90) ¯
N [(α − λβ)β] = N (κ − mλ).
From Theorem 6, we know that N (κ − mλ) < m2 , so
(91) ¯ ¯
N [(α − λβ)β] = N (α − λβ)N (β) < m2 .
¯ ¯
Since N (β) = β β = m, we can apply the cancelation law to see
(92) N (α − λβ) < m,
and from the definitions of γ and m, we can substitute to conclude
(93) N (γ) < N (β).
17](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-17-2048.jpg)
![4 Quaternion GCDs
In addition to norms and units, we are now familiar with other important
ideas about quaternions, namely division and divisors. In other number sys-
tems, we might want to consider when a number of the greatest common
divisor, or GCD, of two other numbers. If d is the GCD of a and b, then
we can easily see that d divides all linear combinations of a and b. This
knowledge can be useful for many reasons, such as proving unique prime fac-
torization within a number system or finding solutions of linear Diophantine
equations. Also in other number systems, the GCD has important connec-
tions to the primality, and such a connection also exists for quaternions. For
this reason, an examination of GCDs in H now will aid our later study of
primes in H .
As we have done with concepts such as the norm, units, and associates,
in order to define a GCD in H , we look to the definition of a GCD in other
number systems. However, knowing that multiplication is not commutative,
we must again be careful to distinguish between left- and right-hand divisors.
Definition. Let α, β be quaternions. Then α and β have a greatest common
right-hand divisor δ, denoted gcdr (α, beta), if
(1) δ is a right-hand divisor of both α and β, and
(2) every right-hand divisor of α and β is also a right-hand divisor of δ.
Theorem 8 (Greatest Common Divisor). Given α, β ∈ H , where at
least one of α and β are non-zero, then α and β have a greatest common
right-hand divisor δ, which is unique up to associates and can be written in
the form
(94) δ = µα + νβ,
where µ, ν ∈ H .
Proof. Let Γ be a set defined as
(95) Γ = {N (µα + νβ) | µ, ν ∈ H }.
Since it was given that both α and β are not zero, then we can see that for
any µ, ν ∈ H , N (µα + νβ) > 0, so Γ ∈ N. Furthermore, taking µ = α and ¯
¯
ν = β, we see that N (N (α) + N (β)], so Γ = ∅. Thus, the Well Ordering
Principle applies to Γ, so we know there exists g0 = N (µ0 α + ν0 β) such that
18](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-18-2048.jpg)
![g0 ≤ g for all g ∈ Γ. Also, define δ = µ0 α + ν0 β. We want to show that δ is
a greatest common right-hand divisor of α and β.
By Theorem 7, we know that given α, δ ∈ H , we can find λ, γ ∈ H so
that
(96) α = λδ + γ,
where 0 ≤ N (γ) < N (δ). Since δ0 = µ0 α + ν0 β, we can substitute to show
(97) α = λ(µ0 α + ν0 β) + γ,
and then rearrange to show
(98) γ = (1 − λµ0 )α + (−ν0 )β.
On account of the closure of addition and multiplication, (1 − λµ0 ), (−ν0 ) ∈
H , and thus N (γ) ∈ Γ if N (γ) > 0. Assume momentarily that N (γ) ∈ Γ.
By Theorem 7, we know that N (γ) < N (δ), however, g0 = N (δ) is the least
element of Γ, so N (γ) ∈ Γ and thus we know N (γ) = 0, and also γ = 0.
/
Equation (96) now becomes
(99) α = λδ,
and by definition, δ α. Similarly, we can see that δ β.
Now let κ ∈ H and assume that κ α and κ β. Then it follows that κ µ0 α
and κ ν0 β, and that κ (µ0 α + ν0 β). Since δ = µ0 α + ν0 β, then κ δ.
Thus, δ is a right-hand divisor of α and β, and an arbitrary common
divisor of α and β is also a divisor of δ. Therefore, by definition, δ is a
greatest common right-hand divisor.
Theorem 9. Suppose α, β ∈ H . If gcdr (α, β) = δ and δ is not a unit, then
gcd[N (α), N (β)] = N (δ), and N (δ) > 1.
Proof. It is given that
(100) gcdr (α, β) = δ,
and so δ is a right-hand divisor of α and β, and there exist γ1 , γ2 ∈ H such
that
(101) α = γ1 δ
(102) and β = γ2 δ.
19](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-19-2048.jpg)
![Taking the norm of both sides of these equations gives
(103) N (α) = N (γ1 δ) = N (γ1 )N (δ)
(104) and N (β) = N (γ2 δ) = N (γ2 )N (δ).
From Lemma 2, the norm of a quaternion is an integer, and from divisibility
for the integers, we can say that
(105) N (δ)|N (α) and N (δ)|N (β).
Thus N (δ) is, at minimum, a common divisor of N (α) and N (β).
Another consequence of equation (100) is that if there exists λ ∈ H that
is also right-hand divisor of α and β, then λ must be a right-hand divisor of
δ. If such λ exists, then there is γ ∈ H such that δ = γ λ. Substituting this
into equations (101) and (102), we see that
(106) α = γ1 γ λ
(107) and β = γ2 γ λ.
Following similar reasoning as above, this implies that
(108) N (λ)|N (α), N (λ)|N (β), and N (λ)|N (δ).
Therefore, if gcdr (α, β) = δ, we can draw two conclusions. First, that
N (δ)|N (α) and N (δ)|N (β). Second, if there exists λ such that N (λ)|N (α)
and N (λ)|N (β), then it must also be the case that N (λ)|N (δ). These are the
two criteria for N (δ) to be the greatest common divisor of N (α) and N (β),
so thus gcd[N (α), N (β)] = N (δ). In addition, it is given that δ is not a unit,
so N (δ) = 1, which, along with Lemma 2, implies that N (δ) > 1.
Theorem 10. Suppose α ∈ H and let β = m ∈ N. Then gcdr (α, β) = 1 if
and only if gcd[N (α), m] = 1.
Proof. By Theorem 8, the following statements are equivalent:
(109) gcdr (α, β) = 1,
and there exist µ, ν ∈ H such that
(110) 1 = µα + νβ.
20](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-20-2048.jpg)
![Equation 110 can be rearranged in the form
(111) µα = 1 − νβ.
Substituting m for β in equation (111) and taking the norm of both sides of
gives
(112) N (µα) = N (1 − mν) = (1 − mν)(1 − m¯),
ν
which can be expanded to
(113) N (µ)N (α) = 1 − mν − m¯ + m2 N (ν)
ν
and then rearranged as
(114) N (µ)N (α) + mν + m¯ − m2 N (ν) = 1.
ν
Let d be an integer such that d = gcd[N (α), m]. By definition, d is a common
divisor of N (α) and m, so d|N (α) and d|m. Thus, each of the following is
true as well:
d|N (µ)N (α), d|mν, d|m¯,
ν and d| − m2 N (ν).
Therefore, from the properties of divisibility for the integers, we know that
d|[N (µ)N (α)+mν +m¯ −m2 N (ν)], and given equation (114), d|1. Since d ∈
ν
Z, d must equal 1. Therefore, gcd[N (α), m] = 1. Note that because N (β) =
m2 , the statement gcd[N (α), m] = 1 is equivalent to gcd[N (α), N (β)] =
1.
5 Primes
We now look at what it means to be a prime quaternion. By proving several
statements about primes in set H , and exploring how these primes relate to
primes in Z, we will eventually be able to prove that any prime number can
be written as a sum of the squares of four integers.
Before we can prove anything about primes in H , we need to know exactly
what constitutes a prime in H . For this, we draw from the definition used
for primes in sets such as Z[i] and Zm .
Definition. A non-zero quaternion π is prime in H if, for any α, β ∈ H
such that π = αβ, either α or β is a unit (but not both).
21](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-21-2048.jpg)
![Now that we have established what it means to be prime in H , we can
begin to prove certain theorems connecting primes in H with primes in Z.
The following theorem is similar to results in Z[i]. A Gaussian integer is
prime in Z[i] if its norm is prime in Z
Theorem 11. Let π be a quaternion. If N (π) is prime in Z, then π is prime
in H .
Proof. It is given that π ∈ H and that N (π) is prime in Z. Define α, β ∈ H
such that
(115) π = αβ.
Taking the norm of both sides of equation (115) gives N (π) = N (αβ) =
N (α)N (β). Since N (π) is prime in Z, by the definition of prime, either N (α)
or N (β) must be a unit in Z. From Lemma 5, this implies that either α or
β is a unit in H . Given equation (115), if either α or β is a unit, then by
definition, π must be prime in H .
Before we can continue to prove things about primes in H , we must first
state an auxiliary theorem that will be needed later.
Theorem 12. Suppose p ∈ Z is an odd prime (p = ±2). Then there exist
x, y ∈ Z such that
(116) 1 + x2 + y 2 ≡ 0 (mod p),
where 0 < x < p and 0 < y < p.
Theorem 13. If an integer p is prime in Z, then p is not prime in H .
Proof. Let p be an integer that is prime in Z. If p = 2, then we can see that
(117) 2 = (1 + i)(1 − i).
Of course, (1 + i) and (1 − i) are in the set H , but neither is a unit, so 2 is
not prime in H . We can therefore assume that p > 2.
By Theorem 12, there exist r, s ∈ Z such that
(118) 1 + r 2 + s2 ≡ 0 (mod p),
22](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-22-2048.jpg)
![where 0 < r < p and 0 < s < p. Now define α ∈ H so that
(119) α = 1 + 0i + sj − rk,
where r and s are obtained from Theorem 12. Thus N (α) = 1 + r 2 + s2 ,
and from equation (118), N (α) ≡ 0 (mod p). It follows from the proper-
ties of modular arithmetic that p|N (α), and it is trivial that p|p. There-
fore, gcd[N (α), p] ≥ p. By definition, p > 1, so it is easy to see that
that gcd[N (α), p] = 1. Using the result of Theorem 10, this implies that
gcdr (α, p) = 1. Now, we define δ such that
(120) δ = gcdr (α, p),
and we know that δ is not a unit in H . Furthermore, because δ is also a
common right-hand divisor of α and p, we can say that δ α and δ p. Thus,
there exist λ1 , λ2 ∈ H such that
(121) α = λ1 δ
(122) and p = λ2 δ.
Assume by way of contradiction that λ2 is a unit in H . Then from equation
(122), we see that p ∼ δ. This in turn implies that p α. Given equation (119),
there must exist γ = c1 + c2 i + c3 j + c4 k ∈ H such that (1 + sj − rk) = γp =
pc1 + pc2 i + pc3 j + pc4 k. However, no such γ exists, because it is impossible
to find a suitable c1 to satisfy pc1 |1 when p > 2. Thus, a contradiction arises,
and it cannot be the case that λ2 is a unit. Hence, p = λ2 δ, where neither
λ2 nor δ is a unit, and therefore, p is not prime in H .
We saw in Theorem 11 the connection between prime quaternions and
prime integers, a result for quaternions which is identical to Gaussian inte-
gers. The following theorem is the converse of Theorem 11 but is not true
for primes in Z[i].
Theorem 14. Let π be a prime in H . Then N (π) is prime in Z.
Proof. It is given that π is a quaternion which is prime in H . However,
assume by way of contradiction, that the norm N (π) is not prime in Z. This
means that there exist integers a and p, both not units, so that
(123) N (π) = ap.
23](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-23-2048.jpg)
![Furthermore, assume that p is a prime factor of N (π). Since by construction,
p|N (π), and also trivially, p|p, then p is a common divisor of N (π) and p, so
gcd[N (π), p] ≥ p. Because p > 1, it is also true that gcd[N (π), p] = 1. From
Theorem 10, it follows that gcdr (π, p) = 1. Define δ such that
(124) δ = gcdr (π, p).
Thus δ 1, so δ is not a unit in H . Since δ is the greatest common right-
hand divisor of π and p, it is also a common right-hand divisor of π and p.
Hence, there exist λ1 , λ2 ∈ H such that
(125) π = λ1 δ
(126) and p = λ2 δ.
Since π is prime and δ is not a unit, then λ1 is a unit, and π ∼ δ. From
Lemma 6, N (π) = N (δ). Taking the norm of both sides of equation (126)
gives N (p) = p2 = N (λ2 δ) = N (λ2 )N (δ), and substituting N (π) for N (δ)
gives
(127) p2 = N (λ2 )N (π).
By combining this with equation (123) and performing simple algebra, we
obtain
(128) p = aN (λ2 ).
Because p was defined to be a prime, then by definition, N (λ2 ) must equal
either 1 or p. Assume temporarily that N (λ2 ) = 1. Then from Lemma 5,
λ2 would be a unit in H . From equation (126), it would follow that p ∼ δ,
and from Lemmas 7 and 8, p ∼ π. But then p would be prime in H , which
violates Theorem 13. This contradiction means that N (λ2 ) cannot equal 1,
and instead must equal p. Substituting this result into equation (127) gives
p2 = pN (π), which reduces to p = N (π). Therefore, since p is prime in Z
and N (π) = p, then N (π) is prime in Z.
We can now combine some of our results to form a single statement that
is stronger than previous theorems.
Theorem 15. Let π be a quaternion. Then π is prime in H if and only if
N (π) is prime in Z.
Proof. This theorem easily follows from Theorems 11 and 14.
24](https://image.slidesharecdn.com/quaternionalgebra-120821201108-phpapp02/75/Quaternion-algebra-24-2048.jpg)