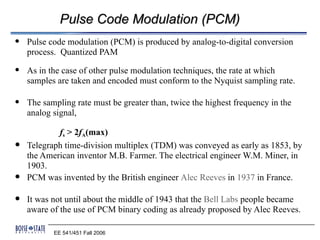
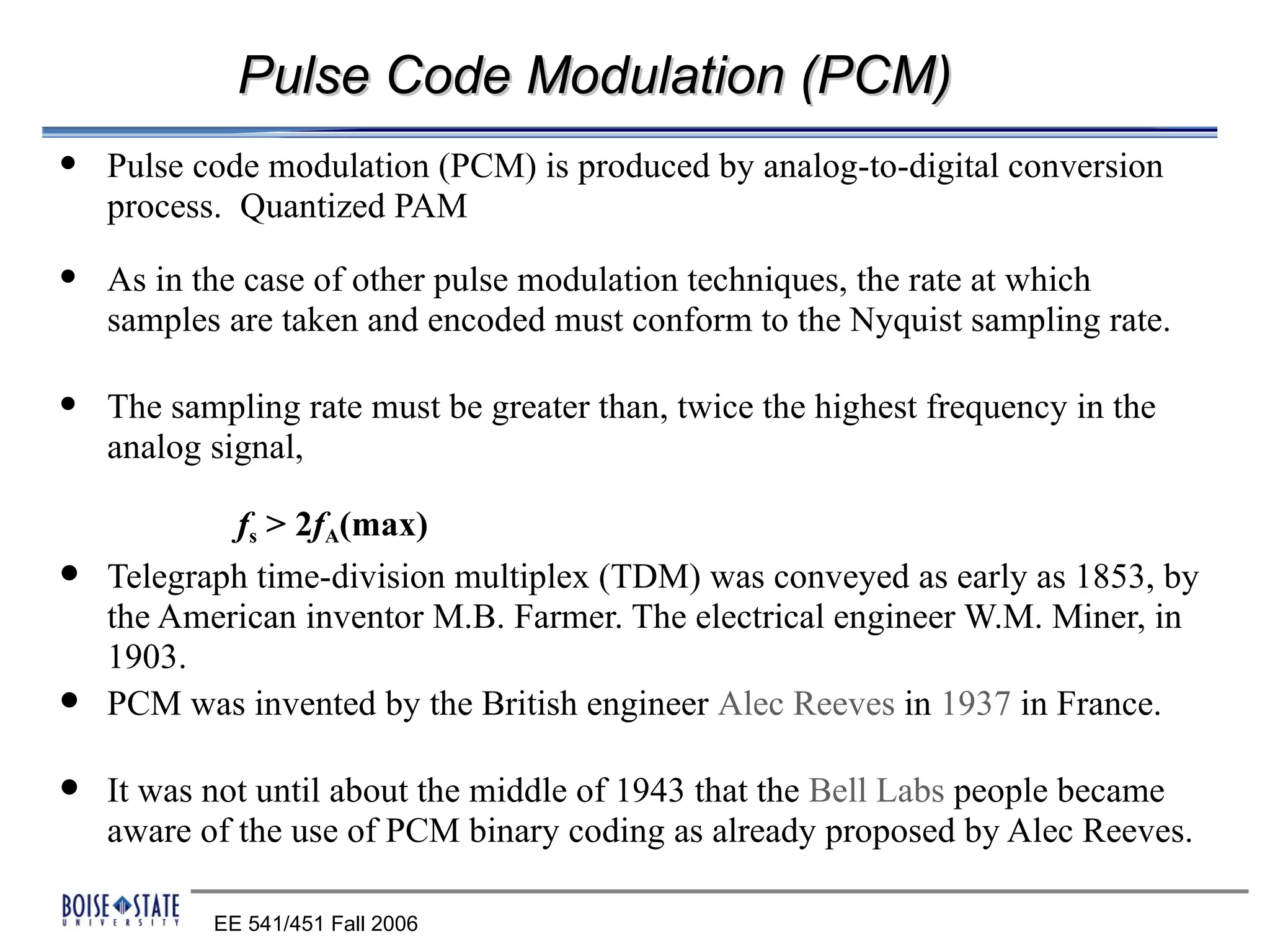
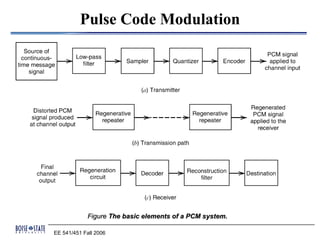
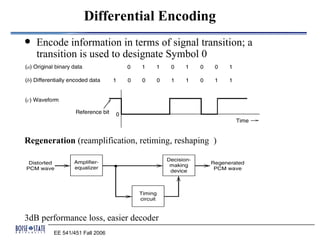
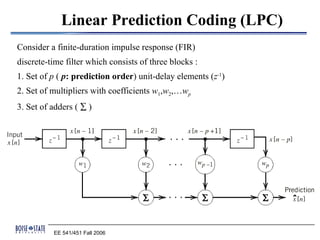
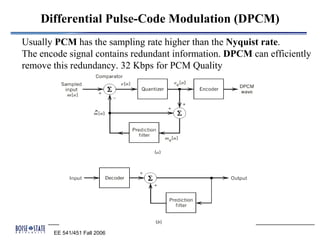
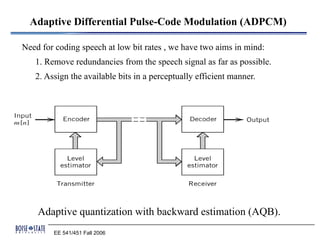
Pulse code modulation (PCM) is an analog-to-digital conversion technique used to represent sampled analog signals as digital data. PCM involves sampling the analog signal at regular intervals, quantizing the amplitude of the signal at each point to a few discrete levels, and coding it as digital data. The sampling rate must be greater than twice the highest frequency of the analog signal as per the Nyquist sampling theorem. PCM was invented in 1937 but was not widely adopted until the 1940s. It became the standard method for digital telephony due to its robustness and ability to efficiently regenerate and transmit signals.

![Processing Gain
The (SNR) o of the DPCM system is
σM
2
(SNR) o = 2
σQ
where σ M and σ Q are variances of m[ n] ( E[m[n]] = 0) and q[ n]
2 2
σM σE
2 2
(SNR) o = ( 2 )( 2 )
σ E σQ
= G p (SNR )Q
where σ E is the variance of the predictions error
2
and the signal - to - quantization noise ratio is
σE
2
(SNR ) Q = 2
σQ
σM
2
Processing Gain, G p = 2
σE
Design a prediction filter to maximize G p (minimize σ E )
2
EE 541/451 Fall 2006](https://image.slidesharecdn.com/pcm-120429100555-phpapp02/85/Pcm-17-320.jpg)
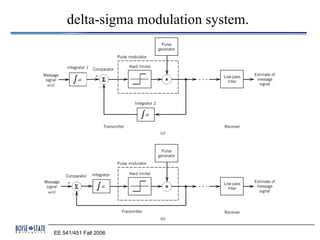
![Delta Modulation (DM)
Let m[ n] = m(nTs ) , n = 0,±1,±2,
where Ts is the sampling period and m(nTs ) is a sample of m(t ).
The error signal is
e[ n] = m[ n] − mq [ n − 1]
eq [ n] = ∆ sgn(e[ n] )
mq [ n] = mq [ n − 1] + eq [ n]
where mq [ n] is the quantizer output , eq [ n] is
the quantized version of e[ n] , and ∆ is the step size
EE 541/451 Fall 2006](https://image.slidesharecdn.com/pcm-120429100555-phpapp02/85/Pcm-27-320.jpg)
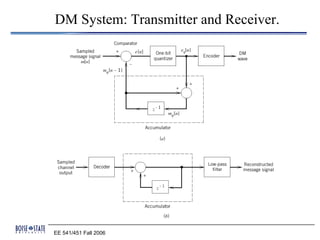
![Slope overload distortion and granular noise
The modulator consists of a comparator, a quantizer, and an
accumulator. The output of the accumulator is
n
mq [ n] = ∆ ∑ sgn(e[ i ])
i =1
n
= ∑ eq [ i ]
i =1
EE 541/451 Fall 2006](https://image.slidesharecdn.com/pcm-120429100555-phpapp02/85/Pcm-29-320.jpg)
![Slope Overload Distortion and Granular Noise
Denote the quantization error by q[ n] ,
mq [ n] = m[ n] − q[ n]
We have
e[ n] = m[ n] − m[ n − 1] − q[ n − 1]
Except for q[ n − 1], the quantizer input is a first
backward difference of the input signal ( differentiator )
To avoid slope - overload distortion , we require
∆ dm(t )
(slope) ≥ max
Ts dt
On the other hand, granular noise occurs when step size
∆ is too large relative to the local slope of m(t ).
EE 541/451 Fall 2006](https://image.slidesharecdn.com/pcm-120429100555-phpapp02/85/Pcm-30-320.jpg)