
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
Similar to X2 t06 07 miscellaneous dynamics questions (2013)
Similar to X2 t06 07 miscellaneous dynamics questions (2013) (20)
More from Nigel Simmons
More from Nigel Simmons (20)
Recently uploaded
Recently uploaded (20)
X2 t06 07 miscellaneous dynamics questions (2013)
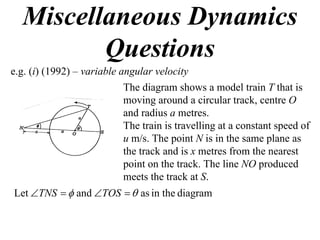
- 1. Miscellaneous Dynamics Questions e.g. (i) (1992) – variable angular velocity The diagram shows a model train T that is moving around a circular track, centre O and radius a metres. The train is travelling at a constant speed of u m/s. The point N is in the same plane as the track and is x metres from the nearest point on the track. The line NO produced meets the track at S. diagramin theasandLet TOSTNS
- 4. ua dt dθ andofin termsExpressa) al dt d a dt dl
- 5. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au
- 6. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au coscos cos that;deduceand0sinsinthatShowb) aax u dt d ax-a
- 7. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au coscos cos that;deduceand0sinsinthatShowb) aax u dt d ax-a ),(exterior OTNTOSTNONTO
- 8. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au coscos cos that;deduceand0sinsinthatShowb) aax u dt d ax-a ),(exterior OTNTOSTNONTO NTO NTO
- 9. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au coscos cos that;deduceand0sinsinthatShowb) aax u dt d ax-a ),(exterior OTNTOSTNONTO NTO NTO sinsin ;In xaa NTO
- 10. ua dt dθ andofin termsExpressa) al dt d a dt dl a u dt d dt d au coscos cos that;deduceand0sinsinthatShowb) aax u dt d ax-a ),(exterior OTNTOSTNONTO NTO NTO sinsin ;In xaa NTO 0sinsin sinsin xaa xaa
- 11. 0coscos respect towithatedifferenti dt d xa dt d dt d a t
- 12. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a
- 13. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos
- 14. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d
- 15. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d when NT is a tangent;
- 16. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O
- 17. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O when NT is a tangent;
- 18. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O when NT is a tangent; radius)(tangent90 NTO
- 19. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O when NT is a tangent; radius)(tangent90 NTO 90
- 20. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O when NT is a tangent; radius)(tangent90 NTO 90 cos90cos 90cos xaa u dt d
- 21. 0coscos respect towithatedifferenti dt d xa dt d dt d a t 0coscoscos dt d xaa dt d a a u a dt d xaa coscoscos coscos cos xaa u dt d track.thetoltangentiaiswhen0thatShowc) NT dt d N T O when NT is a tangent; radius)(tangent90 NTO 90 cos90cos 90cos xaa u dt d 0 dt d
- 22. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 5 3 0
- 23. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0
- 24. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON
- 25. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a
- 26. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a
- 27. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5
- 28. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos
- 29. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos
- 30. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d
- 31. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u
- 32. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5
- 33. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5 0when
- 34. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5 0when 0cos20cos 0cos aa u dt d
- 35. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5 0when 0cos20cos 0cos aa u dt d a u 3
- 36. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5 0when 0cos20cos 0cos aa u dt d a u 3 a u 53 5
- 37. d) Suppose that x = a Show that the train’s angular velocity about N when is times the angular velocity about N when 2 2 when 5 3 0 T ON a 2a a5 5 2 cos 5 1 2 cos cos2 2 cos 2 cos aa u dt d 5 2 2 5 1 5 1 aa u a u 5 0when 0cos20cos 0cos aa u dt d a u 3 a u 53 5 0nlocity wheangular vethe times 5 3 is 2 nlocity wheangular vetheThus
- 38. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle.
- 39. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd
- 40. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd ls
- 41. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd ls dt d l dt ds v
- 42. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v
- 43. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v dt d d dv
- 44. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v dt d d dv l v d dv
- 45. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v dt d d dv l v d dv v d dv l 1
- 46. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v dt d d dv l v d dv v d dv l 1 2 2 11 v dv d d dv l
- 47. (ii) (2000) A string of length l is initially vertical and has a mass P of m kg attached to it. The mass P is given a horizontal velocity of magnitude V and begins to move along the arc of a circle in a counterclockwise direction. Let O be the centre of this circle and A the initial position of P. Let s denote the arc length AP, , dt ds v AOP and let the tension in the string be T. The acceleration due to gravity is g and there are no frictional forces acting on P. For parts a) to d), assume the mass is moving along the circle. a) Show that the tangential acceleration of P is given by 2 2 2 2 11 v d d ldt sd dt dv dt sd 2 2 ls dt d l dt ds v dt d d dv l v d dv v d dv l 1 2 2 11 v dv d d dv l 2 2 11 v d d l
- 48. b) Show that the equation of motion of P is sin 2 11 2 gv d d l
- 49. b) Show that the equation of motion of P is sin 2 11 2 gv d d l
- 50. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T
- 51. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg
- 52. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg
- 53. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sinmg
- 54. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg
- 55. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm
- 56. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings
- 57. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l
- 58. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV
- 59. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV sin 2 11 2 gv d d l
- 60. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV sin 2 11 2 gv d d l sin 2 1 2 glv d d
- 61. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV sin 2 11 2 gv d d l sin 2 1 2 glv d d cglv cglv cos2 cos 2 1 2 2
- 62. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV sin 2 11 2 gv d d l sin 2 1 2 glv d d cglv cglv cos2 cos 2 1 2 2 glVc cglV Vv 2 2 0,when 2 2
- 63. b) Show that the equation of motion of P is sin 2 11 2 gv d d l T mg sm sinmg sinmgsm sings sin 2 11 2 gv d d l cos12thatDeducec) 22 glvV sin 2 11 2 gv d d l sin 2 1 2 glv d d cglv cglv cos2 cos 2 1 2 2 glVc cglV Vv 2 2 0,when 2 2 cos12 cos22 2cos2 22 22 22 glvV glglvV glVglv
- 66. 21 cosyExplain whd) mv l θT-mg T
- 67. 21 cosyExplain whd) mv l θT-mg T cosmg
- 68. 21 cosyExplain whd) mv l θT-mg T cosmg xm
- 69. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm
- 70. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm But, the resultant force towards the centre is centripetal force.
- 71. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force.
- 72. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV
- 73. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT
- 74. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT cos123 1 cos0 glglm l mg
- 75. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT cos123 1 cos0 glglm l mg cos2cos ggmmg
- 76. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT cos123 1 cos0 glglm l mg cos2cos ggmmg mgmg cos3
- 77. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT cos123 1 cos0 glglm l mg cos2cos ggmmg mgmg cos3 3 1 cos
- 78. 21 cosyExplain whd) mv l θT-mg T cosmg xm cosmgTxm 2 2 1 cos cos mv l mgT mgT l mv But, the resultant force towards the centre is centripetal force. 0at whichofvaluetheFind.3thatSupposee) 2 TglV cos12 1 cos 2 glVm l mgT cos123 1 cos0 glglm l mg cos2cos ggmmg mgmg cos3 3 1 cos radians911.1
- 79. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero.
- 80. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude;
- 81. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT
- 82. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg
- 83. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 84. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 85. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 86. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 87. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 88. f) Consider the situation in part e). Briefly describe, in words, the path of P after the tension T becomes zero. When T = 0, the particle would undergo projectile motion, i.e. it would follow a parabolic arc. Its initial velocity would be tangential to the circle with magnitude; 21 cos mv l mgT 21 3 1 mv l mg 3 3 2 gl v gl v
- 89. (iii) (2003) A particle of mass m is thrown from the top, O, of a very tall building with an initial velocity u at an angle of to the horizontal. The particle experiences the effect of gravity, and a resistance proportional to its velocity in both directions. The equations of motion in the horizontal and vertical directions are given respectively by gykyxkx and where k is a constant and the acceleration due to gravity is g. (You are NOT required to show these)
- 93. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1
- 94. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t
- 95. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t
- 96. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt
- 97. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt
- 98. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd
- 99. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin
- 100. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin y ugyk k t sinlog 1
- 101. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin y ugyk k t sinlog 1 gkugykkt sinloglog
- 102. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin y ugyk k t sinlog 1 gkugykkt sinloglog gku gyk kt sin log
- 103. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin y ugyk k t sinlog 1 gkugykkt sinloglog gku gyk kt sin log kt e gku gyk sin
- 104. cosresulttheDerivea) kt uex xk dt xd x u x xd k t cos 1 x ux k t coslog 1 cosloglog 1 ux k t cos log 1 u x k t cos cos cos log kt kt uex e u x u x kt conditioninitialandmotionofequation eappropriatthesatisfiessin 1 tVerify thab) gegku k y kt gyk dt yd y u gyk yd t sin y ugyk k t sinlog 1 gkugykkt sinloglog gku gyk kt sin log kt e gku gyk sin gegku k y kt sin 1
- 105. c) Find the value of t when the particle reaches its maximum height
- 106. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y
- 107. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t
- 108. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1
- 109. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1
- 110. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle?
- 111. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle? cos cos kt kt ue dt dx uex
- 112. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle? cos cos kt kt ue dt dx uex 0 coslim dteux kt t
- 113. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle? cos cos kt kt ue dt dx uex 0 coslim dteux kt t t kt t e k ux 0 1 coslim
- 114. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle? cos cos kt kt ue dt dx uex 0 coslim dteux kt t t kt t e k ux 0 1 coslim 1 cos lim kt t e k u x
- 115. c) Find the value of t when the particle reaches its maximum height 0whenoccursheightMaximum y 0 sinlog 1 ugyk k t gkug k t sinloglog 1 g gku k t sin log 1 d) What is the limiting value of the horizontal displacement of the particle? cos cos kt kt ue dt dx uex 0 coslim dteux kt t t kt t e k ux 0 1 coslim 1 cos lim kt t e k u x k u x cos
- 116. Exercise 9E; 1 to 4, 7 Exercise 9F; 1, 2, 4, 7, 9, 12, 14, 16, 20, 22, 25