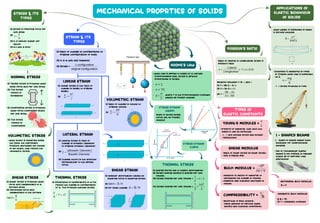
The document discusses physical quantities, distinguishing between fundamental and derived quantities, and includes the concepts of units, measurements, and dimensional analysis. It covers significant figures, errors in measurements, and principles related to motion, including uniform and accelerated motion, along with equations of motion. Additionally, it addresses vector mathematics and circular motion, providing equations and laws relevant to physics.
![Units
and
Measurements
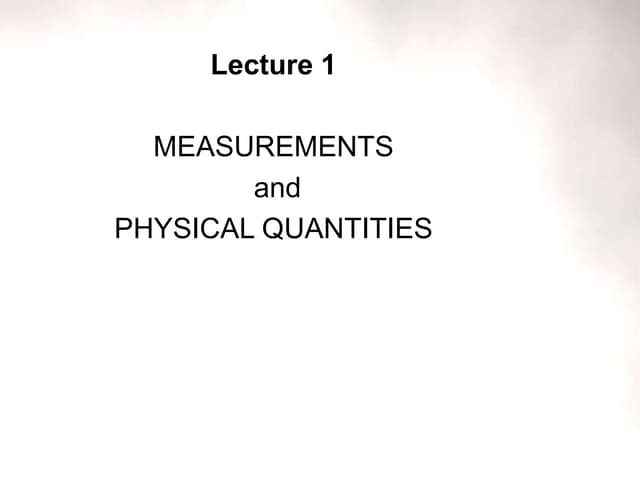
Physical Quantity
- Quantities which can be
measured by an
instrument and used to
describe Laws of physics
are physical quantities
- Physical quantity =
Numerical value (N) × Unit (U)
TYPES
Fundamental quantities do
not depend upon other
quantities:
(1) Length (2) Mass (3) Time
(4) Temperature
(5) Amount of Substance
(6) Electric current
(7) Luminous Intensity
- Derived quantities are
formed by combining more
than one fundamental
physical quantities
- Area, Volume, velocity
and acceleration are
some Derived quantities
Two supplementary S.I units are:-
(1) Radian(plane angle)
, Q= , arc
radius
(2) Steradian (solid angle),
Ω =
2
arc
(radius)
Dimensional Analysis
Dimension formula is the
expression for the unit of a
physical quantity in terms of
the fundamental quantities
Dimensional formula is
expressed in terms of
power of M, L and T.
Primary or fundamental
Dimensional Formula
Secondary or derived
dimensional Formula
(i) Other than Fundame-
ntal formula all other
are derived
dimensional Formula
(ii) example: (1) [speed] =
[MoL1T-1],
(2) [Acceleration]
= [MoL1T2]
There are seven
fundamental
dimensional formulas:
(1) Mass = [M], (2) Length
= [L], (3) Time = [T],
(4) Temperature = [K] or
[Q], (5) Electric Current
= [I], (6) Luminous
intensity = [cd],
(7) amount of matter
= [mol]
PRINCIPLE OF HOMOGENITY
Principle of homogeneity
states that the
dimension of each term
on both sides of
dimensional equation
should be same.
Conversion of Units From
are system to another
N1 = numerical part of
one system
N2 = numerical part of
another system
a b
1 1 1
2 1
2 2 2
M L T
N N
M L T
=
UNITS
(1) Unit is defined as the
reference standard used
for measurements.
(2) Measurements consists of
a numerical value along with
a relevant unit.
(3) Example: meter, newton,
joule, seconds etc.
MKS
(m, kg, s)
CGS
(m, gm, s)
FPS (Ft,
pound, s)
- The system of units
accepted internationally
- S.I units of time is ‘sec’
is the example of S.I system
S.I Units
SOME OTHER UNITS
(1) mass:- 1 quintal = 100 kg,
1 ton = 1000 kg
(2) length:- 1 light year =
9.46 × 1015 m
1 au = 1.496 × 1011 m
(3) Temperature: Oo C =
273 K 1o F = 255.928 K
KNOW YOUR LCROS
(SIGNIFICANT FIGURES)
The number of digits in the
measured values about the
correctness are known as
significant figures.
4.125 - 4 sf;
123 - 3 sf
All non – zero
digits are
significant
Leading zeroes i.e
, are never
significant placed
to the left of the
number
0.0403 - 3 sf;
0.04030 - 4 sf
10.9 - 3 sf;
400.001 - 4 sf
All zero lie in
between the non
– zero digits are
significant
38.3 × 104 - 3 sf;
38.30 × 10-9 - 4 sf
Order of magnitud
e is not considered
Constants and pure
numbers have infinite
significant figures;
Trailing zero digits
are significant only
when they appear
after decimal 4.00 - 3 sf;
0.043010 - 5 sf
RULE OF ROUNDING OFF
- Rules of Rounding off the
uncertain digits
(up to 3 Significant Figures)
If digit > 5
then, preceding digit +1
If digit <5 then, preceding
digit remain same
If insignificant digit = 5;
(a) Preceding digit
remain same when
rounded off digit is even.;
(b) Preceding digit +1 when
rounded off digit is odd
ORDER OF MAGNITUDE
It is defined as the power
of 10 which is closest to
its magnitude
N = n × 10x; x = order
of magnitude.
ERRORS
The uncertainty in
measurement is called
errors
- Error = true value –
measured Value
TYPES OF ERROR
Absolute Error, =
true value –
measured value
Mean absolute errors
1 2 n
mean
.............
n
∆α + ∆α + + ∆α
∆α =
Relative error
mean
mean
∆α
α
Percentage error,
is difference the
measured value and the
true value as a
percentage of true value
Percentage error
mean
mean
100
∆α
×
α
ACCURACY PRECCISION
Precision is the range
of variation of true
value during several
observation
Accuracy is degree of
closeness of measured
value to the true value;
- shows that how closely
the results with the
standard value.
VERNIER CALLIPERS
Least Count (L.C) =
1 MSD – 1 VSD; MSD =
main scale division;
VSD = Vernier
scale division
Total reading = Main
scale Reading
+(Vernier Coincidence
× least Count)
Zero error = N × L.C;
N = no. of coinciding
division;
L.C = Least count of an
instrunment.
displacement of screw
no. of rotations
Pitch =
L.C. =
Pitch
total no. of divisions
Unit
45
kg
Numerical
Value
coefficient
6.022 x 1023
exponent
base
Vernier scale
Main scale
Zero error = N × L.C
N = no. of circular
scale division that
coincides with the
reference line
L.C = Least Count
Positive Zero Error
10
0
5
0
Positive Zero Error
Negaitive Zero Error
0
0
95
90
Negative Zero Error
Positive zero error
0 1
0 5 10
Main Scale
Vernier scale
Negative zero error
0 1
0 5 10
Main Scale
Vernier scale
Measurments
Units And
r
r
‘A’ is
Area r2
Equivalent
in area
r
r
1](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-1-320.jpg)
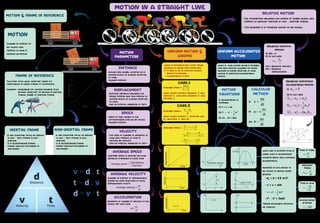
![Units
and
Measurements
Physical Quantity
- Quantities which can be
measured by an
instrument and used to
describe Laws of physics
are physical quantities
- Physical quantity =
Numerical value (N) × Unit (U)
TYPES
Fundamental quantities do
not depend upon other
quantities:
(1) Length (2) Mass (3) Time
(4) Temperature
(5) Amount of Substance
(6) Electric current
(7) Luminous Intensity
- Derived quantities are
formed by combining more
than one fundamental
physical quantities
- Area, Volume, velocity
and acceleration are
some Derived quantities
Two supplementary S.I units are:-
(1) Radian(plane angle)
, Q= , arc
radius
(2) Steradian (solid angle),
Ω =
2
arc
(radius)
Dimensional Analysis
Dimension formula is the
expression for the unit of a
physical quantity in terms of
the fundamental quantities
Dimensional formula is
expressed in terms of
power of M, L and T.
Primary or fundamental
Dimensional Formula
Secondary or derived
dimensional Formula
(i) Other than Fundame-
ntal formula all other
are derived
dimensional Formula
(ii) example: (1) [speed] =
[MoL1T-1],
(2) [Acceleration]
= [MoL1T2]
There are seven
fundamental
dimensional formulas:
(1) Mass = [M], (2) Length
= [L], (3) Time = [T],
(4) Temperature = [K] or
[Q], (5) Electric Current
= [I], (6) Luminous
intensity = [cd],
(7) amount of matter
= [mol]
PRINCIPLE OF HOMOGENITY
Principle of homogeneity
states that the
dimension of each term
on both sides of
dimensional equation
should be same.
Conversion of Units From
are system to another
N1 = numerical part of
one system
N2 = numerical part of
another system
a b
1 1 1
2 1
2 2 2
M L T
N N
M L T
=
UNITS
(1) Unit is defined as the
reference standard used
for measurements.
(2) Measurements consists of
a numerical value along with
a relevant unit.
(3) Example: meter, newton,
joule, seconds etc.
MKS
(m, kg, s)
CGS
(m, gm, s)
FPS (Ft,
pound, s)
- The system of units
accepted internationally
- S.I units of time is ‘sec’
is the example of S.I system
S.I Units
SOME OTHER UNITS
(1) mass:- 1 quintal = 100 kg,
1 ton = 1000 kg
(2) length:- 1 light year =
9.46 × 1015 m
1 au = 1.496 × 1011 m
(3) Temperature: Oo C =
273 K 1o F = 255.928 K
KNOW YOUR LCROS
(SIGNIFICANT FIGURES)
The number of digits in the
measured values about the
correctness are known as
significant figures.
4.125 - 4 sf;
123 - 3 sf
All non – zero
digits are
significant
Leading zeroes i.e
, are never
significant placed
to the left of the
number
0.0403 - 3 sf;
0.04030 - 4 sf
10.9 - 3 sf;
400.001 - 4 sf
All zero lie in
between the non
– zero digits are
significant
38.3 × 104 - 3 sf;
38.30 × 10-9 - 4 sf
Order of magnitud
e is not considered
Constants and pure
numbers have infinite
significant figures;
Trailing zero digits
are significant only
when they appear
after decimal 4.00 - 3 sf;
0.043010 - 5 sf
RULE OF ROUNDING OFF
- Rules of Rounding off the
uncertain digits
(up to 3 Significant Figures)
If digit > 5
then, preceding digit +1
If digit <5 then, preceding
digit remain same
If insignificant digit = 5;
(a) Preceding digit
remain same when
rounded off digit is even.;
(b) Preceding digit +1 when
rounded off digit is odd
ORDER OF MAGNITUDE
It is defined as the power
of 10 which is closest to
its magnitude
N = n × 10x; x = order
of magnitude.
ERRORS
The uncertainty in
measurement is called
errors
- Error = true value –
measured Value
TYPES OF ERROR
Absolute Error, =
true value –
measured value
Mean absolute errors
1 2 n
mean
.............
n
∆α + ∆α + + ∆α
∆α =
Relative error
mean
mean
∆α
α
Percentage error,
is difference the
measured value and the
true value as a
percentage of true value
Percentage error
mean
mean
100
∆α
×
α
ACCURACY PRECCISION
Precision is the range
of variation of true
value during several
observation
Accuracy is degree of
closeness of measured
value to the true value;
- shows that how closely
the results with the
standard value.
VERNIER CALLIPERS
Least Count (L.C) =
1 MSD – 1 VSD; MSD =
main scale division;
VSD = Vernier
scale division
Total reading = Main
scale Reading
+(Vernier Coincidence
× least Count)
Zero error = N × L.C;
N = no. of coinciding
division;
L.C = Least count of an
instrunment.
displacement of screw
no. of rotations
Pitch =
L.C. =
Pitch
total no. of divisions
Unit
45
kg
Numerical
Value
coefficient
6.022 x 1023
exponent
base
Vernier scale
Main scale
Zero error = N × L.C
N = no. of circular
scale division that
coincides with the
reference line
L.C = Least Count
Positive Zero Error
10
0
5
0
Positive Zero Error
Negaitive Zero Error
0
0
95
90
Negative Zero Error
Positive zero error
0 1
0 5 10
Main Scale
Vernier scale
Negative zero error
0 1
0 5 10
Main Scale
Vernier scale
Measurments
Units And
r
r
‘A’ is
Area r2
Equivalent
in area
r
r
1](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/75/Class-11th-Physics-NEET-formula-sheet-pdf-1-2048.jpg)
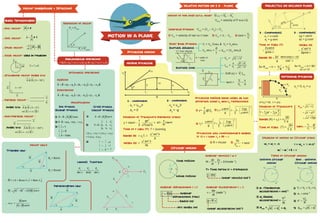
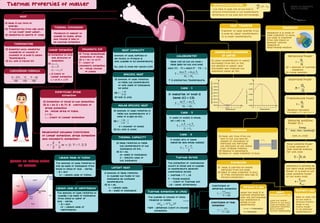
![NEWTON’S LAWS OF MOTION
Newton’s 1st law
A body Continues its sate of
rest or motion until unless an
external force is acted on it.
If ext
F o
=
; a o
=
INERTIA OF REST
The property of a
body due to which it
cannot change its
state of rest by it
self.
The property due to
which a body cannot
change its direction of
motion by itself.
The tendency of a
body to remain in
a state of uniform
motion in a
straight Line.
INERTIA OF DIRECTION INERTIA OF MOTION
FORCES
(i) Normal Contact force
(1) always acts along the
common Normal of two surface
in contact.
(2) Always directed towards the
system.
(3) It is an electromagnetic
type of force. Normal force on
block is N. N = mg
(ii) Tension Force
(1) Acts along the string and
away from the system on
which it acts.
(2) Tension in a massless string
remains constant throughout
the string if no tangential
force acts along the string.
(3) This is force applied by a
string on an object or force
applied by one part of string
on the remaining part of
string.
(4) It is an electromagnetic
type of force.
(iii) Friction Force
(1) Rolling friction:- The force of friction which
comes into play when one body Ralls or tends
to roll on the surface of a norther body.
(iV) Sliding friction
Resistance offered to the
relative motion between
the surface of two bodies
in contact.
The frictional force f is
directly proportional to
the Normal force N
exerted by the surface
on the body.
(F ∝ N or f/N = Constant = µ).
The friction force depends
upon the nature of surfaces
in Contact and independent
of the area of Contact.
Types of friction
fs = µsN.
acts when a body is
just at the verge
of movement
acts when a body is
at rest on application
of a force
Fl = µsN.
acts when a body
is actually sliding
fk = µKN
Newton’s 2nd Law
The rate of change of linear momentum of a body
is directly proportional to the external force applied on
the body in the direction of force.
dp
F ma
dt
= =
S.I . Unit of force = Newton (W)
dimensional formula = [M1L1T-2]
if m = const
mdv
F ma
dt
= =
⇒
if V Cost
=
=
dm
F V
dt
=
convey or belt &
rocket propulsion
Conservation of linear momentum:-
if there is no external force
acting on it, total momentum of
an isolated system of interacting
particles is conserved
ext initial final
dp
F o or P P
dt
= = =
Impulse
avg
I F t P
= ∆ = ∆
⇒ I = P F.dt
∆ = ∫ = area under f – t curve
Newton’s 3rd law
To every action there is always on
equal and opposite reaction.
AB BA
F F
= −
Action & Reaction act on different
bodies and not on the same body. -
action – reaction forces are of
same type.
We cannot produce a single isolated
force in nature force are always
produce in action – reaction pair.
due to no time gap, any one force
can be action, and other reaction.
applicable for all the interactive
forces eg. Gravitational,
electrostatic, electromagnetic,
Tension, friction, viscous forces, etc.
For Non – inertial frame
ext Pseudo
F F ma
+ =
pseudo frame
F Ma
= −
• Draw FBD of bodies in the system.
• Choose a convenient part of the assembly as one
system.
• Identify the unknown force and accelerations.
• Resolve forces into their Components.
• Apply F ma
=
∑
in the direc�on of mo�on.
• Apply F O
=
∑
in the direc�on of equilibrium
• Write constraint rela�on if exists.
• Solve the equa�on F ma & F O
= =
∑ ∑
.
Horizontal Circular motion
(Conical Pendulum):-
2
Sin cos
mv
T & T mg
r
θ θ
= =
V rgtan
= θ
Angular Speed, w =
v gtan
W
r r
θ
= =
2
T
w
π
= r Lcos
2 2
gtan g
θ
π = π
θ
Time Period
Vertical Circular motion
Particle ossillates in lower half circle.
Condition of ossillation (O u 2gR)
< ≤
1.
2.
3.
Particles moves to upper half circle but not able to complete the loop.
Condition of leaving the circle: ( )
2gR u 5gR
< <
particle completes loop. Condition of looping the loop ( )
u 5gR
≥
MOTION OF A CAR M LEVEL ROAD
(by friction only):-
Vmax S
Rg
≤ µ
MOTION OF A CAR ON
BANKED ROAD
(i) Optimum speed of a vehicle on a banked road. V rgtan
= θ
maximum safe speed on a banked frictional road. max
rg( tan )
V
1 tan
µ + θ
=
−µ θ
minimum safe speed on a banked frictional road min
Rg(tan )
V
(1 tan )
θ − µ
=
+µ θ
Kinematics of Uniform Circular motion
1.A particle moves in a circle at a constant
speed
2. Angular displacement (θ) SI Unit: rad or
degree.
3. Angular Velocity (W):
avg
W [Unit . rad / sec]
t
∆θ
=
∆
ins
d
W
dt
θ
=
Centripetal Force
Fc = mac =
2
mv
r
= mrw2
S r O
∆ = ∆ v = wr
V w r
= ×
V
is linear velocity (tangential vector)
w
(axial vector)
r
= radius vector
Speed of the particle in a
horizontal circular motion
changes with respect to time.
f
N
mg
R
Speed = v
a = v² / R
O
Tangential acceleration:
t
a r
= α ×
Centripetal force
Fc = mac =
2
2
mv
mrw
r
=
Tangential force Ft = mat
Net force Fnet = 2 2
c t
m a a
+
C
a
responsible for change in direc�on of movement of particle
Static friction Limiting friction Kinetic friction
Circular
motion
N
f
mg
Kinematics of non – Uniform
circular motion
SOLVING PROBLEMS IN MECHANICS
T
O
P
L
mg cos
mg sin
mg
F Cosθ
F sinθ
θ
θ
h
r
l
F
mg](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-4-320.jpg)
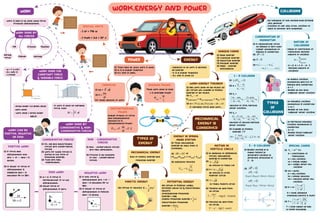
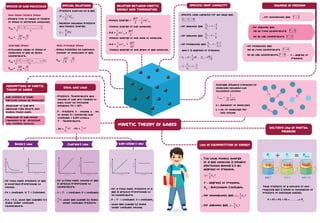
![System of particles and
rotational motion
CENTRE OF MASS
The point where whole mass of system is
supposed to be concentrated
1. Position of centre of mass depends upon shaped, size
and distribution of mass of body
2. Position of centre of mass of an object changes in
translation motion.
3. For bodies of normal dimensions centre of mass &
center of gravity coincide.
4. Centre of mass of rigid bodies is independent of the
state i.e rest or motion of the body.
Position of Centre of
mass of system
i i
cm
i
m r
r
m
=
∑
∑
Velocity of centre of
mass of system
i i
cm
i
m v
V
m
=
∑
∑
Acceleration of Centre
of mass of system
i i
cm
i
m a
a
m
=
∑
∑
RIGID BODY
A body with perfectly definite and
unchanging shape.
Rotational Equilibrium
ext
ext r F O
τ = ε × =
Translational Equilibrium
ext
F O
=
∑
PRINCIPLE OF MOMENTS FOR A LEVER
According to this principle;-
Load × Load arm = effort × effort arm
Analogy between linear & Rotational motion
Linear motion
Velocity
ds
V
dt
=
acceleration
ds
a
dt
=
Force
mdv
F ma
dt
= =
work done
W F.S
=
linear K.E
2
1
mv
2
Power
P = F.V,
Linear momentum
P = mv
Impulse
F t mv mu
∆ = −
Rotational Motion
Angular velocity
dQ
W
dt
=
angular acceleration
dw
dt
α =
torque
d
I (Iw)
dt
τ = ∝ =
Work – done
w .Q
= τ
rotational K.E
2
1
Iw
2
Power
P = .w
τ ,
angular momentum
L = Iw
angular Impulse
f i
pt Iw Iw
τ = −
MOMENT OF INERTIA
Inertia of Rotational motion
n
2 2
i i
i 1
mr MK
=
=
∑
M.I. I =
where r is distance perpendicular to the
axis of Rotation.
Radius of gyration
2 2 2
1 2 n
r r ..........r
K
n
+
=
I
K
M
=
Factors & radius of
gyration depends
(1) Position & configuration
of the axis of rotation
(2) distribution of mass
about the axis of
Rotation.
Perpendicular axis theorem
Theorem of moment of Inertia
Parallel – axis theorem
IZ = IX + Iy
, Itanget = Idia + MR2
Hollow sphere,
radius R
(9) Diameter 2
2
mR
3
Shape of area Distance x Distance y Area
Square a/2 a/2 a2
Rectangle a/2 b/2 ab
Circle r r r2
Semi-circle 4r/3 r r2
/2
Right-angled triangle b/3 h/3 bh/2
MOTION OF SYSTEM OF PARTICLES
& RIGID BODY
Pure Rotational Motion:-
(1) Since distance between two particles of
a rigid body remains constant, So the
relative motion of one particle w.r.t other
particle is circular motion.
(2) Angular velocity of all the particles
about a given point of a Rigid body is
same
S = RQ, V Rw
= ;
(3) If α = Constant (angular acceleration),
), Wf = wi + α t ,
Qf = wit + 2
1
t
2
α 2
f
w =
2
i
w + 2αθ, θ = i f
w w
t
2
+
θ = wft - 2
1
t
2
α → K.Erolling = 2 2
1 1
mv Iw
2 2
+ ,
2
2 2
2
1 1 V
mv mk
2 2 r
+
2
2
2
1 K
mv 1
2 R
+
Combined Rotation + translation Motion
(CRTM):-
CRTM pure rotation translational
V V V
= +
CRTM pure rotation translational
a a a
= +
Dynamics of CRTM
for analysing its motion we apply two
equation
ext cm
Ma
τ =
∑
ext
ext I r F
τ = α = ×
∑
Newton’s laws of motion is valid in inertial
frame.
To apply second equation of Newton about Non
– inertial Point, Pseudo – force is applied at
Com of body Σ of pseudo force is also taken
into account.
→ K.ECRTM = K.Erotation + K.Etranslation;
K.E = 2
2
cm
cmw
1 1
I MV
2 2
+ ;
K.E = 2 2 2
cm
1 1
MK w MV
2 2
+
→ angular momentum of Rigid body per forming
CRTM; Pure Rotational as a Rigid body about
C.O.M; Translation as a particle
(EK)r = rota�onal K.E (EK)t = transla�on K.E
(a) for solid sphere, (Ek)r = 40% of (Ek)t,
(b) For snell (Ek)r = 66% of (Ek)t,
(c) For disc, (Ek)r = 50% of (Ek)t of (Ek)t,
(d) For ring, (Ek)r = (Ek)t
(1) ROLLING ON INCLINED PLANE
(2) VELOCITY AT LOWEST POINT
2
2
2gh
V
K
1
R
=
+
(3) ACCELERATION ALONG INCLINED PLANE
a = 2
2
gsin
K
1
R
θ
+
(4) Time taken to reach the bottom of the inclined plane is.
2
2
K
2n (1
1 R
t
sin g
+
=
θ
ANGULAR MOMENTUM CONSERVATION
O OA
L r P (angular momentumabout point O)
= ×
OA
= r (mv)
×
OA
mr v
= ×
O OA OA
L r P r Psin
= × = θ
OA
r mv sin
= θ
ANGULAR MOMENTUM CONSERVATION
net
d
dt
τ
τ =
if net
τ
= O ⇒ L =constant
n
system i
i 1
L L
=
=∑
Angular momentum of rigid body performing pure
rotation about fixed axis (Lsys)AOR = IAOR
w
Relation between Torque & Angular momentum:
• net
dt
dt
τ =
• Unit of Torque = N.m
• Dimensional formula = [m1
L2
T-2
] Valid in only iner�al frame.
Angular Impulse:- J .dt
= ∫ τ
, f i
net
J L L
= −
, J r I
= ×
, Unit → NmS
Linear Impulse:- I F dt
= ∫
, net f i
I P P
= −
, Unit → N.S](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-6-320.jpg)
![GRAVITATION
• Energy required to bring a mass
from an infinite position to point
under gravitational field of earth
with constant velocity
• Generally, infinite is reference
point
= 1 2
Gm m
u
r
Every planet revolves around the
sun in an elliptical orbit and sun is
at it’s one of the foci points.
LAW OF ORBIT
KEPLER's
LAW OF
PLANETARY
MOTION
LAW OF AREA
(i) The line joins any planet to the
sun sweeps equal area in equal
intervals of time
(ii]
LAW OF PERIODS
(i) The square of time period of
revolution of a planet is
proportional to cube of semi –
major axis of an ellipse
THE gravitational Force acting between
two bodies separated by distance ‘r’ is
directly proportional to product of their
masses and inversely proportional to
square of distance between them
(1) During Free fall under gravity in
side a spacecraft or satellite, body
is weightless.
(2) Effective weight of body becomes
Zero.
WEIGHTLESSNESS
Minimum speed required by an
object to escape Gravitational
Field of Earth
e
2GM
V 2gR
R
= =
Ve = 11.2 Km/s
(iii) Areal velocity is constant
dA L
dt 2m
=
(ii)
(iii)
2 3
T R
∝
2 3
2 4 R
T
Gm
π
=
(1) GEOSTATIONARY SATELLITE
Height from earth’s surface = 36,000 km
RADIUS = 42,400 Km
Time Period = 24 hours.
(2) POLAR SATELLITE
Height from earth’s surface = 330 Km
Time Period = 84 Min
Orbital Velocity = 7.92 Km/s
GEOSTATIONARY & POLAR
SATELLITE
GM
r
GMM GMM
2r r
=
GMM
2r
= −
(i) orbital velocity =
(ii) Total energy of satellite =
Constant
K.E + P.E = constant
(iii) Total energy =
Relation between
Gravitational potential
& Intensity
dv
E
dr
=
V E . dr
∆ = ∫
(i)
(ii)
(i)
(ii)
(iii)
(i)
(ii)
(iii)
Strength of Gravitational field
applied per unit test mass is
defined as Gravitational Field
Intensity
2
GM
E r
r
−
=
2 2
3
(3R r )
r R v GM
2R
−
< → = −
GM
r R v
R
= → = −
GM
r R v
r
> → = −
Amount of work done in moving a
unit test mass from - position
to point under gravitational field
of earth
Gm U
V
r M
= =
Variation of ‘g’ from equator to pole
2 2
g g Rw cos
= −
Variation of ‘g’ with depth
d s
d
g g (1 )
Rc
= −
2
n s
1 h
g g ( )
Rc
−
+
=
if h <<<< Rc
h s
2h
g g (1 )
Rc
= −
At surface of earth,
Fgravitational
= Weight
2
c
GmMe
Mg
R
=
2
c
Gme
gs
R
=
GRAVITATIONAL
ACCELERATION
1 12 13 1n
F F F ....... F
= + + +
Resultant force acting on a
particle due to other particles is
vector sum of forces exerted by
individual particle in it
F1 = F12 + F13 + ……. + F1n
12 21
F F
= −
1 2 1 2
12 3
1 2
Gm m (r r )
F
r r
−
=
−
1 2
12
12 2
1 2
Gm m
F r
r r
=
−
12
r Force between them.
=
2
r position of second particle
=
1
r position of first particle
=
1 2
2
Gm m
F
r
=
2
11
2
Nm
G 6.67 10
Kg
−
⇒ = ×
Y
m1
m2
F12
r21
F21
O
r1
r2
X
F02
F0n
rn
r3
F03
r1
r2
F01
SUPERPOSITION
PRINCIPLE IN SCALAR FORM
SUPERPOSITION
PRINCIPLE IN VECTOR
FORM
h
R
R+h
m
v0
POLAR ORBIT
T = 2-3
ROTATION OF EARTH
T = 24 hours
ESCAPE SPEED &
ENERGY CONSERVATION
GRAVITATIONAL POTENTIAL
& GRAVIATATION POTENTIAL
M r
Ms ME
NEWTON'S LAW OF
GRAVITATION](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-7-320.jpg)
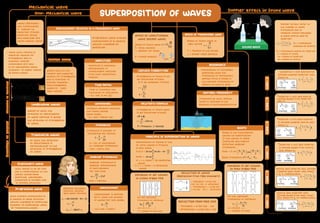
![MECHANICAL PROPERTIES
OF FLUIDS
INTRODUCTION
Anything which can
flow like liquid &
Gases Known as
Fluids.
Pressure
P = F
Force acting per unit
Area.
Atmospheric
Pressure
Force exerted by
Atmospheric Column
on Unit area at
mean sea level.
[P0
= 1.013 × 105
N/m2
]
Gauge Pressure
Exass Pressure over
the Atmospheric
Pressure (Po - Patm
Measured with
instrument.
Pgauge
= P – P0
= rgh
Hydraulic Paradax
water is filled to a
height H behind a
dam of width w. The
resultant Pressure
on dam will be –
Pnet
= rgH
A
HYDRODYNAMICS
Equation of
Continuity
A1
V1
= A2
V2
Characteristics of
Ideal Fluids
Pascal Law
Whenever external
Pressure is applied
on any part of Fluid
Contained in a Vessel,
it is transmitted
undiminished and
equally in all direction
is known as Pascal Law.
Hydraulic lift
1 2
1 2
1 2
F F
P P
A A
= = = 1 2
2
1
FA
F
A
=
,
Hydraulic Brakes
A1
d1
= A2
d2
Hydraulic Machine
PA
= PB
= PC
= PO
C
A B D
F
F F F
A B C D
F1
A2
A1
F2
Master
cylinder
Brake
pedal
Brake
shoe
Lever system
P
Tube T
To other
wheels
Wheel
cylinder
P1 P2
S 1 S 2
Hydraulic Brakes
D
C
B
A
Archimedes Principle
“Whenever a body is immersed
inside a liquid then an up thrust
forces states acting on it,
whose magnitude is Equal to the
weight of the liquid displaced”.
Upthrust Force - FB
= (∫e × g × Vd) = weight of liquid
displaced.
∫l = density of liquid.
g = gravity ; Vd = volume of
liquid displaced.
Law of Floating
b S
l
V
V
=
V = Volume of body
Vs
= Volume of
submerged part.
∫b
= density of body.
∫e
= density of liquid.
Case – I
Case – 2
Case – 3
[Vs
< V ∫b
< ∫l
]
[Vs
= V ∫b
= ∫l
]
[Vs
> V ∫b
> ∫l
]
Incompressible
. Non – Viscous
. Irrotational
. Steady (Liminas)
Bernoulli Theorem
P + ∫gh + ∫V2 = Constant
P = Pressure; V = Volume
∫ = density ; h = height
g = gravity
Applications
Magnus Effect:
speed of air flow decreases
pressure increased
force on ball
speed of air flow
increases
pressure
reduces
Spin
Blowing off of thin Roof in
storm:
wind
p0
v large so
p<p0
p
Speed of Efflux: B
V 2g H
=
H
H –h
h
V
B
A
P0
H = Height from the Top
Venturi meter:
V2
V1
A1
A2
p0
p0
h
H
The entering
Velocity of fluids is given by
1 2 2 2
1 2
2gh
V A
A A
=
SURFACE TANSION
ANGLE OF CONTACT
Angle between tangent Plane at the liquid surface and tangent plane
at point of contact of solid.
Surface energy
Additional potential
energy exhibited by
liquid molecules present
at the surface of the
molecules.
Excess Pressure Inside a Curved Liquid Surface
Excess pressure inside
the drop
ex i 0
2
( )
S
P P P
r
P0
P1
dr
r
= +
Excess pressure inside a
cavity or air bubble in liquid
ex
inside atm
2
2
S
P gh
r
S
P P gh
r
Pout
= Patm
h
Pin
=
=
+ +
+ ρ
ρ
Excess pressure inside a
soap bubble
ex i 0
4S
P P P
r
P0
Pi
P
r
= =
-
Relation between
cohesive and
adhesive force
C
A
2
F
F >
glass
water
concave surface
FR
FC
FA
C
A
2
F
F =
silver
FR
FC
FA horizontal surface
water
C
A
2
F
F <
glass
mercury
convex surface
FR
FC
FA
Angle of contact 90
(Acute angle)
90
(Right angle)
90
(Obtuse angle)
Shape of meniscus Concave Plane Convex
Wetting property Liquid wets the solid
surface
Liquid does not wet
the solid surface
Liquid does not wet the
solid surface
Level of Liquid Liquid rises up Liquid neither rises
nor falls
Liquid does not wet the
solid surface
Example Glass-Water Silver-Water Glass-Mercury
θ >
θ < θ =
ο ο ο
Cohesive Force and Adhesive Force
Cohesive Force:- Attractive Force between the molecules of same
materials.
Adhesive Force:- A Hr active Force between the molecules of
different Materials.
Capillarity
It is Property due to which liquid elevates & depressed in a
capillary Tube. The Rise in height of liquid in
25 Cos
r g
capillary tube is given by – h =
Shape of Meniscus
VISCOSITY
Newton’s Law of Viscosity:-
Viscous Force
A = Area
velocity Gradient=
Stoke’s Law:-
When a small sphere of radius
r is moving with velocity v
through a homogeneous Fluid,
then viscous force acting on
sphere – FV
= 6 πnrv;
Where n = Coefficient of
viscosity; Unit of n = Poise.
Terminal Velocity
Constant Velocity achieved Before net force on a body
becomes Zero.
Reynold number
It tell us about the nature of fluid flow Re =
Vd
n
Where ∫ = density; V = velocity; d = pipe parameter.
Critical speed:- Maximum Value of speed for which fluid will
remain laminar. [VC = Re
n/∫d]
dv
nA
dx
F =
dv
dx
h2
h1
A
L
F1
F2
A
P0](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-9-320.jpg)
![CHARACTERISTICS OF LINEAR SHM
- Differential Equation of S.H.M
2
2
x
2
d x
0
dt
+ ω =
- Displacement - x =
- Velocity -V = dx
dt
= ω A Cos(ωt + φ)
A sin (ωt + φ)
- Acceleration - a = A sin(wt + ) = -ω2x
2
acceleration
(a)
ω2
A
T
T
t
–
0
Displacement
A
A
X
t
T t
T
2
)
v
(
y
t
i
c
o
l
e
v
Graph of v - t
Graph of X - t Graph of a - t
ENERGY OF LINEAR S.H.M
→ P.E → U = 2
1
Kx
2
K.E → K = 2 2
1
K(A x )
2
−
→ P.E → U = 2 2
1
K A sin ( t )
2
ω + φ
K.E → K = 2 2
1
K A cos ( t )
2
ω + φ
TIME PERIOD CALCULATION
(1) Force → 2
x
F m or F k x
= − ω = −
;
k
m
ω =
Time period T =
2π
ω
=
m
2
k
π
K → spring Constant
Spring Block System
Time Period → T =
eq
m
2
k
π
T =
eq
m
2
k
π ;
(i) keq = K1 + K2
T =
1 2
m
2
k k
π
+
(ii) Keq = 1 2
1 2
K K
K K
+
;
T =
eq
m
2
k
π
T = 1 2
1 2
m(k k )
2
K K
+
π
TWO BLOCKS SPRING SYSTEM
Reduced Mass: µ = 1 2
1 2
m m
m m
+
T = 1 2
1 2
m m
2 2
K(m m ) k
µ
π = π
+
DAMPED
AND
FORCE
OSCILLATIONS
DAMPED OSCILLATION
(1) Amplitude → A1 = Ae-bt/2m
(2) Angular Frequency → w1 =
2
2
k b
m 4m
− ,
Where – b = damping
Constant
FORCED OSCILLATION
(1) Amplitude (For → wd >> ω) → A1 = o
2 2
d
F
m(w w )
−
(2) Amplitude → A1 = Fo/wdb
ωd → Driving Frequency
ω → Natural Frequency
ANGULAR S.H.M
(i) Different Equation →
2
2
2
d
t 0
dt
θ
ω θ =
⇒ Displacement → θ = θo sin (ωt + S)
⇒ Torque → T = Kθ
⇒ Angular Velocity → W =
K K
; Angular accelartion
I 1
− θ
→ ∝ =
⇒ Time period – T =
I
2
K
π
PENDULUM
Simple Pendulum
F ∝ -θ;
F = -Kθ;
Time period → = 2
g
π
Physical Pendulum
:- Time period → T =
I
2
mgd
π
I : MoI of system
M : Mass of System
d: distance between com and hinge
Torsional Pendulum
T ∝ θ
T = -Cθ [C = Torsional Constant]
Time period – T =
I
2
C
π
I : Moment of Inertia
SIMPLE HARMONIC MOTION
m
k2
k1 m
k1 k2
m2
m1
k
ωt
P.E.
P.E.
Kmax
or Umax
or ET
K,
U
m
0.6 0.8 1.0 1.2 1.4
oscillator as a function of the angular
frequency of the driving force
Amplitude
1
2
3
Energy
T.E
K.E
P.E
-A A
X
mg
mg
sinθ
θ](https://image.slidesharecdn.com/ilovepdfmerged-240430215148-10c4b350/85/Class-11th-Physics-NEET-formula-sheet-pdf-13-320.jpg)