This presentation summarizes Turing machines, including:
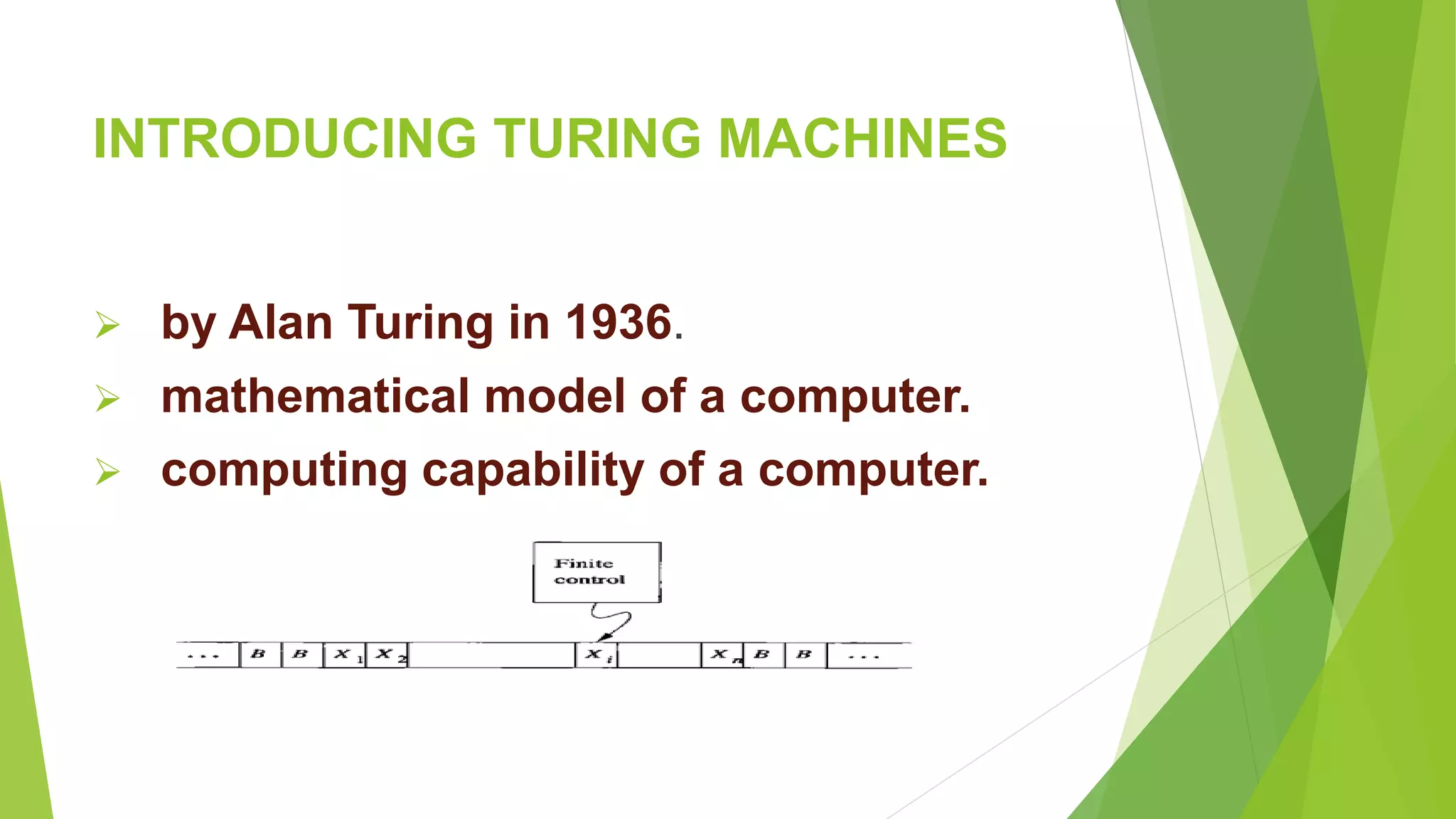
- Turing machines were introduced by Alan Turing in 1936 as a mathematical model of computation.
- A Turing machine consists of a finite state control, a tape divided into cells, and a tape head that can read and write symbols on the tape and move the tape left and right.
- Turing machines are formally defined by a 7-tuple that specifies the states, tape alphabet, transition function, blank symbol, start state, and accepting states.
Objectives
Definition
FormalDefinition
Representation of Turing Machine
Model of Turing Machine
Transition Function
Transition Diagram
Instantaneous Description
Multi-tape Turing Machine
Example
3.
INTRODUCING TURING MACHINES
by Alan Turing in 1936.
mathematical model of a computer.
computing capability of a computer.
4.
DEFINITION
a finite-statemachine
a tape head that can read or write one
tape cell and move left or right.
accepts the input string
used for input and working storage.
5.
Representation of TuringMachine
Turing Machine is represented by
M=(Q, ∑, Γ,δ,q0,B,F) ,
Where
Q is the finite state of states
∑ a set of Γ not including B, is the set of input symbols,
Γ is the finite state of allowable tape symbols,
δ is the next move function, a mapping from Q × Γ to Q × Γ
×{L,R} Q0 in
q0 is the start state,
B a symbol of Γ is the blank,
F is the set of final states.
TRANSITION FUNCTION
One move(denoted by |---) in a TM does the
following:
δ(q , X) = (p ,Y ,R/L)
q is the current state
X is the current tape symbol pointed
by tape head
State changes from q to p
Instantaneous Description For
TuringMachine
ID of a Turing Machine is a snapshot of Turing Machine to describe the
current situation of the Turing Machine.
X1 X2…Xi-1 q Xi Xi+1 …Xn
Means:
• q is the current state
• Tape head is pointing to Xi
• X1X2…Xi-1XiXi+1… Xn are the current tape symbols
δ (q , Xi ) = (p ,Y , R ) is same as:
X1 X2…Xi-1 q Xi Xi+1 …Xn |---- X1 X2…Xi-1 Y p Xi+1…Xn
δ (q ,Xi) = (p, Y ,L) same as:
X1 X2…Xi-1 q Xi Xi+1 …Xn |---- X1 X2…pXi-1Y Xi+1 …Xn
10.
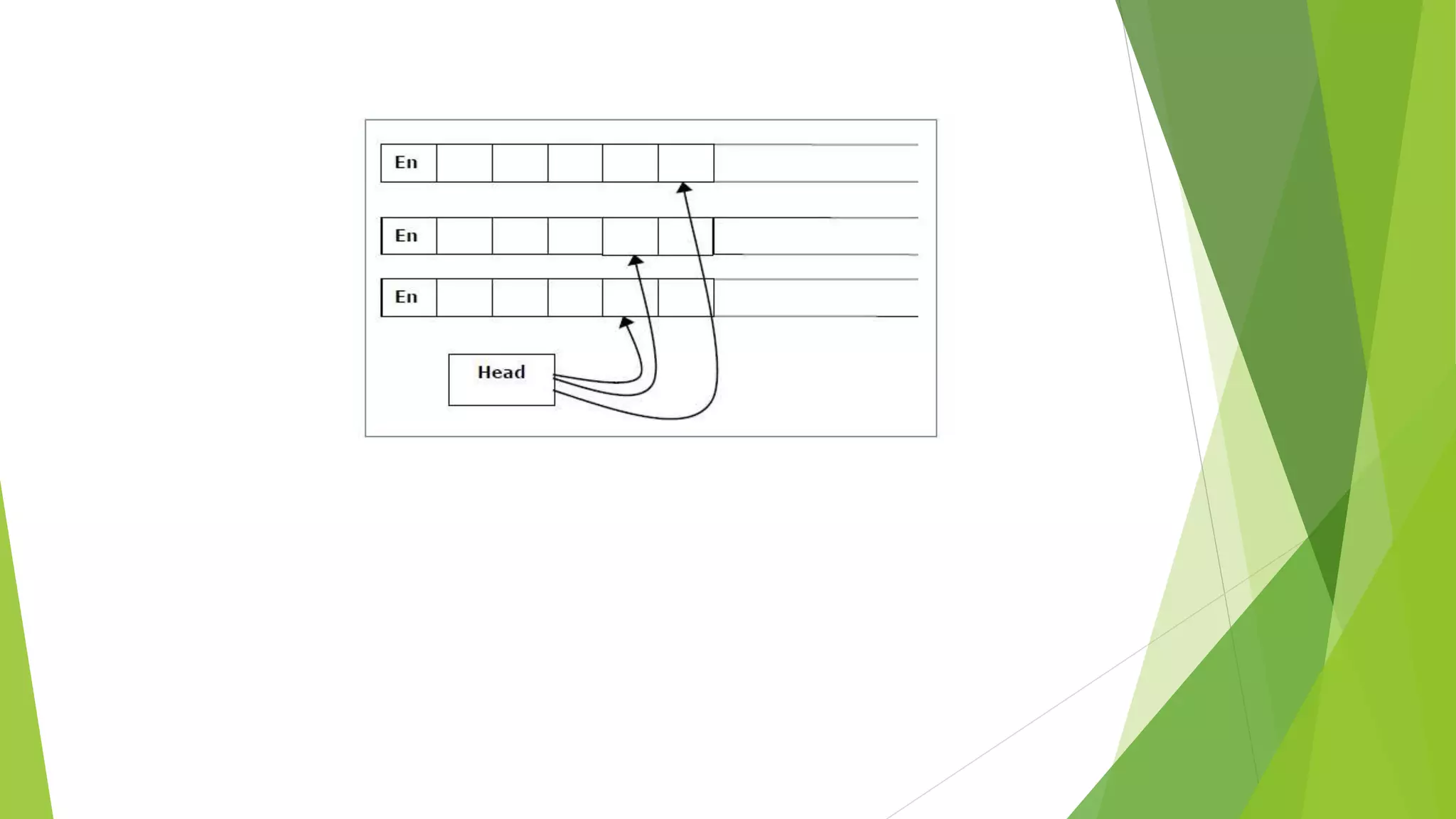
MULTITAPE TURING MACHINES
A Turing Machine with several tapes
Every Tape have their Controlled own R/W
Head
For N- tape TM M=(Q,∑, Γ,δ,q0,B,F)
we define δ : Q X ΓN Q X ΓN X { L , R} N
11.
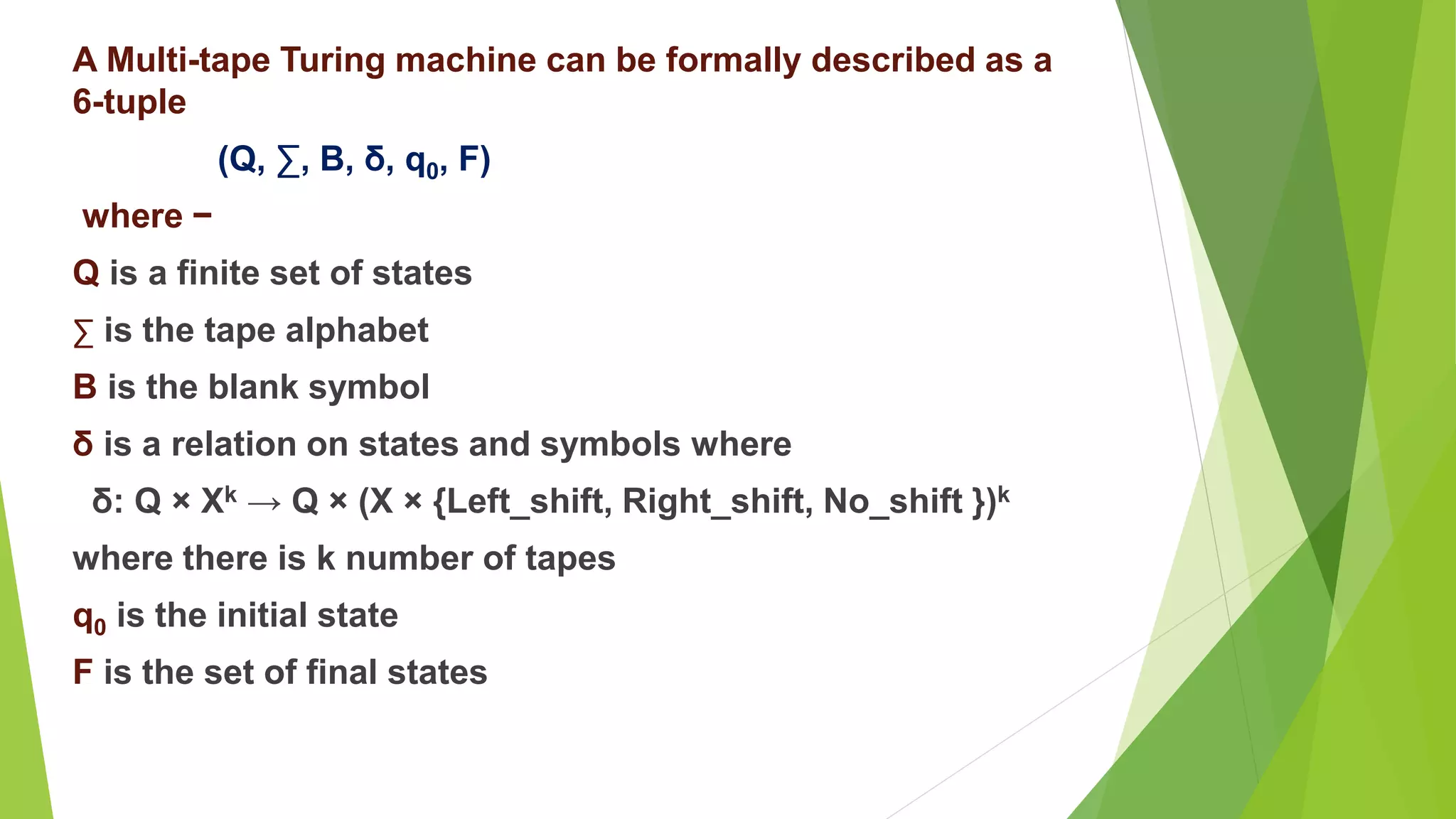
A Multi-tape Turingmachine can be formally described as a
6-tuple
(Q, ∑, B, δ, q0, F)
where −
Q is a finite set of states
∑ is the tape alphabet
B is the blank symbol
δ is a relation on states and symbols where
δ: Q × Xk → Q × (X × {Left_shift, Right_shift, No_shift })k
where there is k number of tapes
q0 is the initial state
F is the set of final states
13.
Uses Of TuringMachine
language recognizer
language generator
language evaluator
language decider
14.
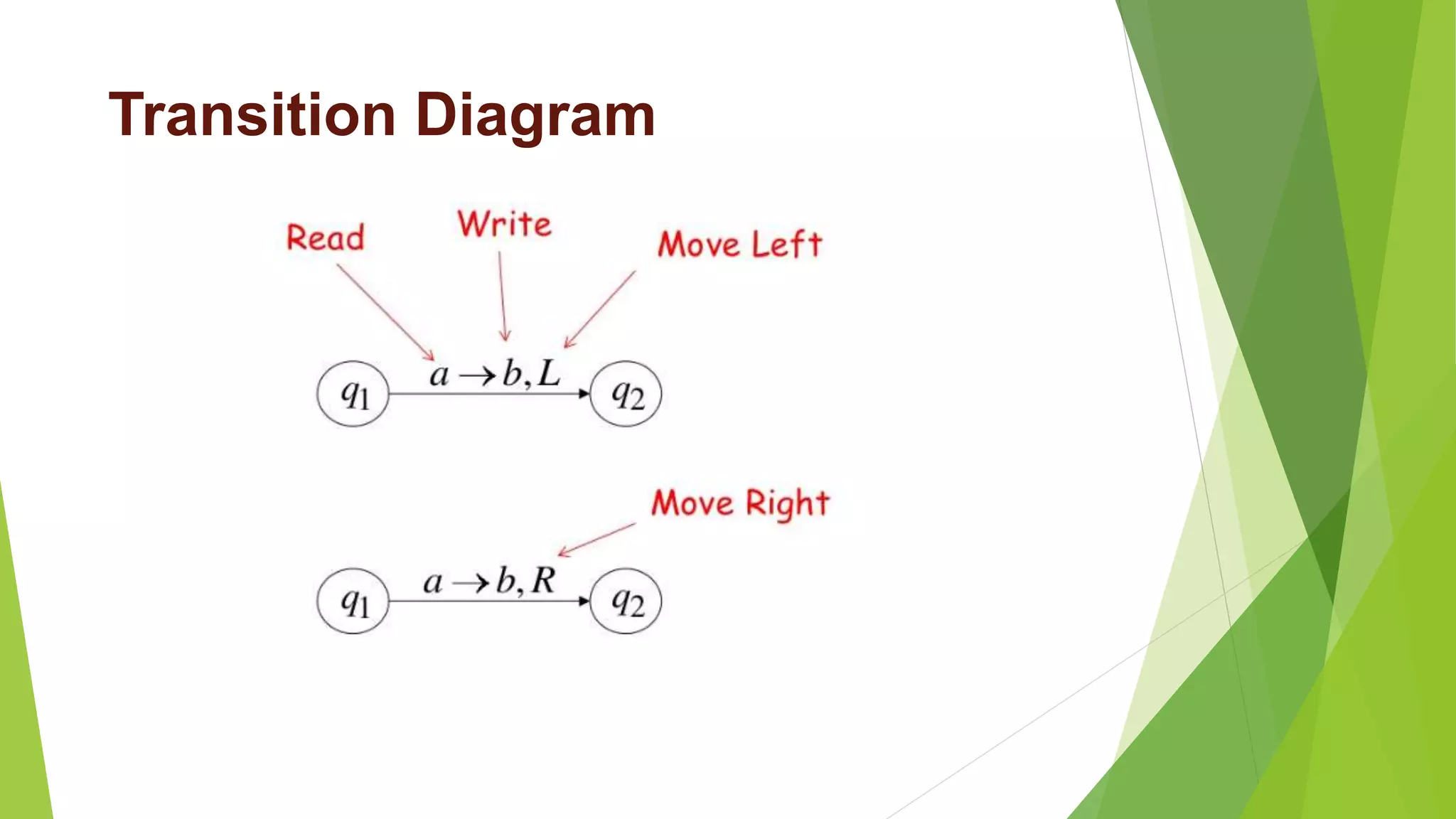
Transition Diagram ofTuring Machine
The formal specification of the Turing Machine M that accept the language
{0n1n | n ≥ 1}is,
M = ({q0, q2, q3,q4},{0,1},{0,1,X,Y,B}, δ, q0, B, {q4})
where δ is given in the table below,