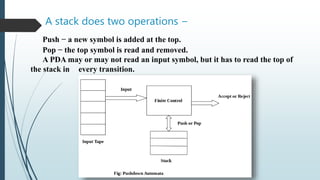
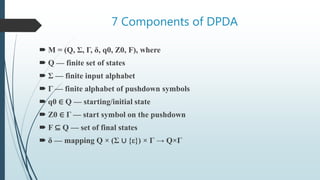
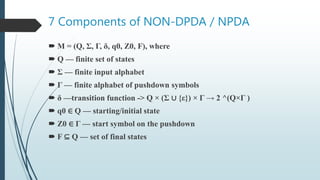
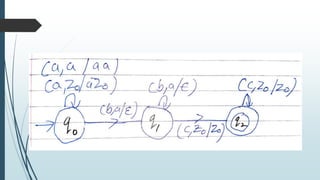
The document discusses pushdown automata (PDA), which are more powerful than finite automata (FA) as they can accept languages that FA cannot. A PDA comprises a finite state machine and an infinite-size stack, with operations to push and pop symbols. It describes the components of deterministic PDAs (DPDA) and non-deterministic PDAs (NPDA), emphasizing their structural differences.