Downloaded 11 times

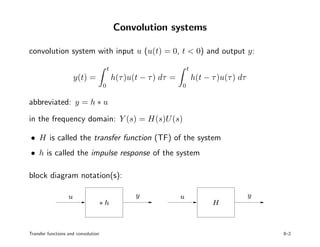
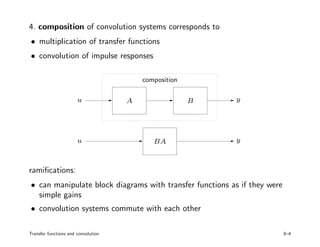
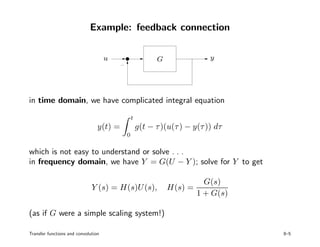
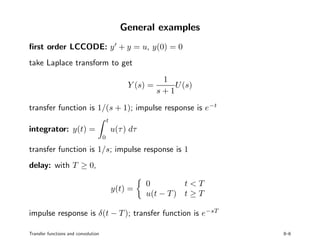
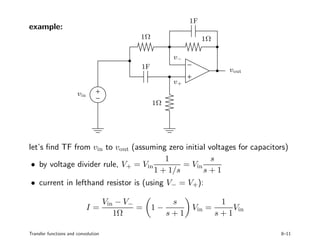
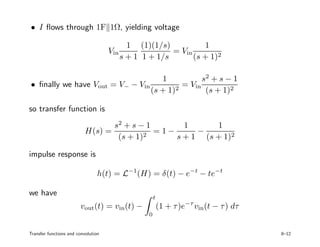
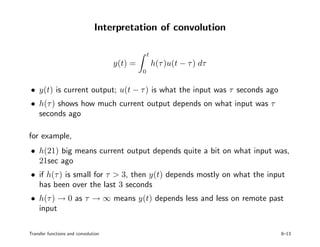
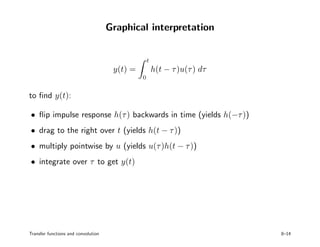
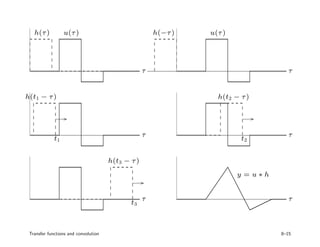
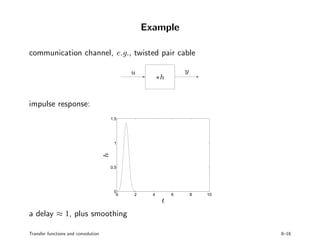
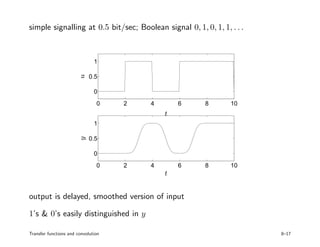
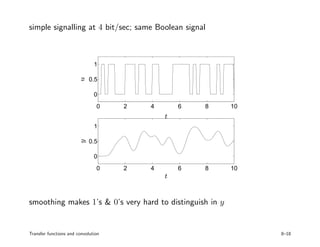

This document summarizes key concepts about transfer functions and convolution: 1. Convolution represents linear time-invariant (LTI) systems, where the output is the impulse response convolved with the input. In the frequency domain, the transfer function is the frequency response. 2. Properties of convolution systems are that they are linear, causal, and time-invariant. Composition of convolution systems corresponds to multiplication of transfer functions. 3. Examples of convolution systems and calculating their transfer functions are presented for circuits, mechanical systems, and communication channels. Interpreting the impulse response provides insight into how past inputs affect current system outputs.