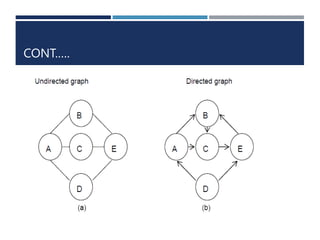
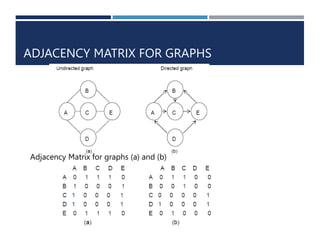
The document discusses graphs and graph algorithms. It begins by defining what a graph is - a collection of vertices connected by edges. It then lists four learning objectives related to representing graphs, traversing graphs, calculating minimum spanning trees, and finding shortest routes. The document goes on to describe different ways of representing graphs through adjacency matrices and lists. It also explains graph traversal algorithms like depth-first search and breadth-first search. Finally, it discusses algorithms for finding minimum spanning trees and shortest paths in weighted graphs.







![ADJACENCY LISTS
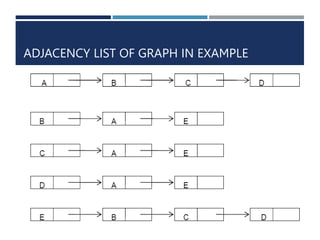
An Adjacency List is a linked list of Vertices adjacent to a given
vertex
Let G be a graph with n vertices, where n > 0.
Let V(G) = {v1, v2, ..., vn}.
In the adjacency list representation, corresponding to each vertex,
v, there is a linked list such that each node of the linked list
contains the vertex u, such that (v, u) ⊆ E(G).
Because there are n nodes, we use an array, A, of size n, such that
A[i] is a reference variable pointing to the first node of the linked
list containing the vertices to which vi is adjacent. Each node has
two components, say vertex and link.
The component vertex contains the index of the vertex adjacent to
vertex i](https://image.slidesharecdn.com/datastructures-230331115304-074db38a/85/DATA-STRUCTURES-pptx-16-320.jpg)






















![SHORTEST PATH
Given a vertex, say vertex (that is, a source), this section
describes the shortest path algorithm.
The general algorithm is:
1. Initialize the array smallest Weight so that smallest
Weight[u]=weights[vertex, u].
2. Set smallest Weight[vertex] = 0.
3. Find the vertex, v, that is closest to vertex for which the shortest path has
not been determined.
4. Mark v as the (next) vertex for which the smallest weight is found.
5. For each vertex w in G, such that the shortest path from vertex to w has
not been determined and an edge (v, w) exists, if the weight of the path
to w via v is smaller than its current weight, update the weight of w to the
weight of v + the weight of the edge (v, w).](https://image.slidesharecdn.com/datastructures-230331115304-074db38a/85/DATA-STRUCTURES-pptx-45-320.jpg)