Downloaded 85 times
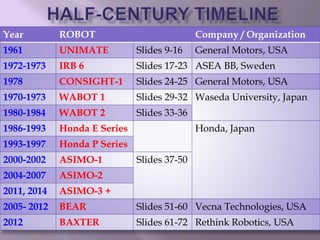
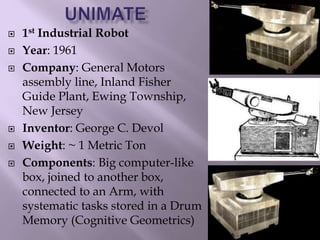
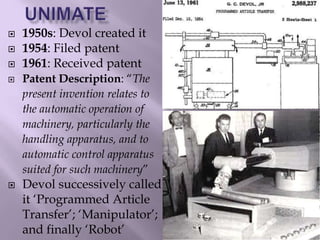














The document provides an extensive overview of the evolution of robotics, detailing the history, definition, and classifications of robots from their inception to modern advancements. Highlighted are significant robots such as Unimate, IRB 6, and Asimo, discussing their capabilities and applications across various fields including industrial, military, and healthcare. It emphasizes that contemporary robots, while fascinating, do not possess self-awareness or the dramatic capabilities often depicted in science fiction.