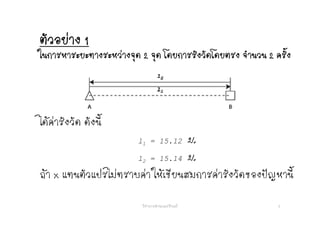
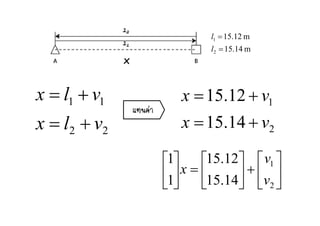
x
2 l l2l l
x
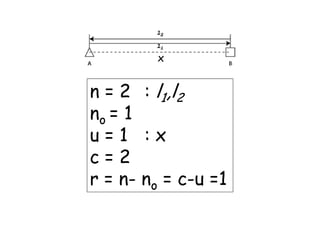
n = 2 : l1,l2
n = 1
n = 2 : l1,l2
n = 1no = 1
u = 1 : x
no = 1
u = 1 : xu = 1 : x
c = 2
u = 1 : x
c = 2
r = n- no = c-u =1r = n- no = c-u =1
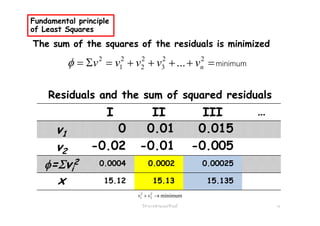
Fundamental principle
of LeastSquares
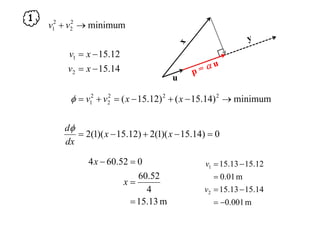
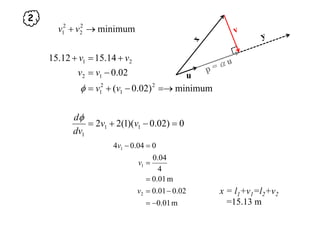
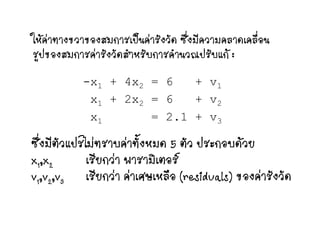
The sum of the squares of the residuals is minimized
i i++++Σ 22222
vvvvvφ minimum=++++=Σ= 321 ... nvvvvvφ
Residuals and the sum of squared residuals
I II IIII II III …
v1 0 0.01 0.015
v2 -0.02 -0.01 -0.005
φ=Σv 2 0 0004 0 0002 0 00025φ=Σvi
2 0.0004 0.0002 0.00025
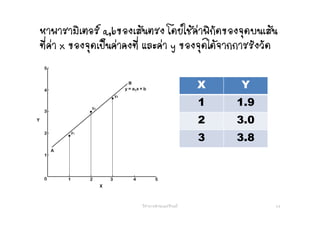
x 15.12 15.13 15.135
13วิชาการคํานวณปรับแก
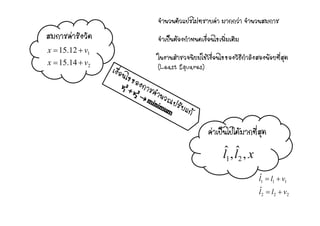
minimum2
2
2
1 →+ vv
หนังสืออางอิงและอานประกอบหนงสออางองและอานประกอบ
L S J1998 Li Al b ith A li ti 5thLeon, S.J., 1998, Linear Algebra with Applications 5th
edition – Chapter 5 Orthogonality, Prentice Hall, Inc.
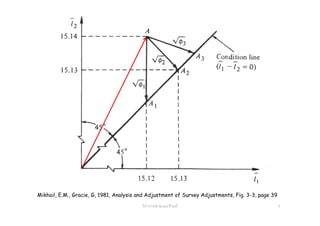
Mikhail, E.M., Gracie, G, 1981, Analysis and Adjustment of
Survey Adjustments – Chapter 3 The Concept ofy j p p
Adjustment, Van Nostrand Reinhold Co.
27.
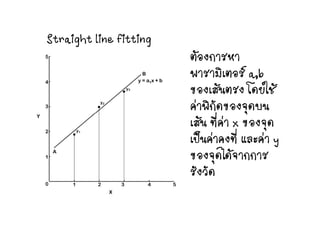
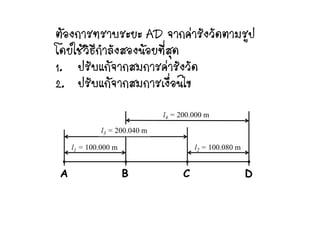
ตองการทราบระยะ AD จากคารังวัดตามรปตองการทราบระยะAD จากคารงวดตามรูป
โดยใชวิธีกําลังสองนอยที่สุด
ป ั ั ั1. ปรับแกจากสมการคารังวัด
2. ปรับแกจากสมการเงื่อนไข
l 200 000
2. กจากสมกา น ข
l3 = 200.040 m
l4 = 200.000 m
l1 = 100.000 m l2 = 100.080 m
A B C D
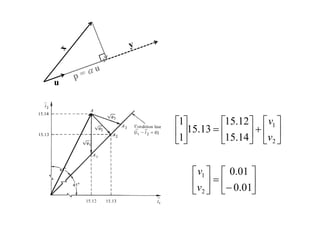
![⎥
⎦
⎤
⎢
⎣
⎡
=
1415
12.15
x
⎥
⎦
⎤
⎢
⎣
⎡
=
⎦⎣
1
1
14.15
y
[ ] ⎥
⎤
⎢
⎡
=
⎥
⎦
⎢
⎣
1
14.1512.15
1
1
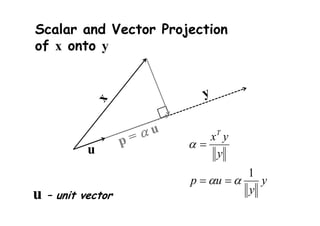
αu [ ]
=
⎥
⎦
⎢
⎣+ 22
2630
1
1
14.1512.15
11
α
=
1
26.30
2
yp α
⎥
⎤
⎢
⎡11
2630
1
y
y
p α
⎤⎡⎤⎡
⎥
⎦
⎢
⎣
=
ˆ1
12
26.30
2
l
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=⎥
⎦
⎤
⎢
⎣
⎡
=
2
1
ˆ1
1
13.15
l
l](https://image.slidesharecdn.com/xzk2xpyjrjwxtss5kwhc-signature-419e9e50dabfb46b886f468460fd859b16c072a948527abc13ffb3fc2d3b2f19-poli-150514141405-lva1-app6891/85/slide-11-320.jpg)