More Related Content

PDF
DataRobotを用いた要因分析 (Causal Analysis by DataRobot) 
PDF
数学カフェ 確率・統計・機械学習回 「速習 確率・統計」 
PPTX

PDF
Optuna Dashboardの紹介と設計解説 - 2022/12/10 Optuna Meetup #2 
PPTX
深層強化学習による自動運転車両の経路探索に関する研究 
PDF

PPTX

PPTX
What's hot

PDF

PDF
最近強化学習の良記事がたくさん出てきたので勉強しながらまとめた 
PDF

PPTX

PDF

PDF

PDF

PDF
Surveyから始まる研究者への道 - Stand on the shoulders of giants - 
PDF

PDF
Pythonによる、デジタル通信のための ビタビ符号化・復号ライブラリの作成 
PDF

PPTX
これからの Vision & Language ~ Acadexit した4つの理由 
PDF
マイクロマウスのための MATLAB/Simulink 講座 第1回 - MATLAB入門 
PDF
「あなたがいま読んでいるものは文字です」~画像情報学から見た文字研究のこれから 
PDF
![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法 
PPTX
【DL輪読会】Is Conditional Generative Modeling All You Need For Decision-Making? 
PDF
【DL輪読会】Mastering Diverse Domains through World Models 
PDF

PDF
Viewers also liked

PDF

PDF
超小型クアッドロータ "Quadruptor" の製作とその制御 
PDF

PDF
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう 
PDF

PDF

PPTX

PPTX
さるでも分かりたい9dofで作るクォータニオン姿勢 
PDF

PDF

PDF

PDF
北部九州における産学連携による小型電気飛行機の開発 
PDF

PDF
楽しいクォータニオンの世界 田所 第二回Rogyゼミ 
PPTX

PPTX

PPTX
オープンソースによるドローン開発の概要( #ABC2015S ) 
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発 
PPTX

PDF
論文紹介 Semi-supervised Learning with Deep Generative Models Similar to クモ型ロボットにおける逆運動学計算

PDF

PPTX

PDF
201110 01 Polytech Center 1 
PDF

PDF

PDF

PDF
coma Study Room vol.2 Arduino Workshop ![[DL輪読会]Learning agile and dynamic motor skills for legged robots](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar0125nishimura-190125001509-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Learning agile and dynamic motor skills for legged robots 
PDF

PDF

PDF

PDF
RTミドルウェアによるロボットプログラミング技術 �1.コース概要 
PDF
Variable Stiffness Mechanism(VSM):可変剛性機構に関する研究紹介 
PDF

ODP

PDF
ロボットマニピュレーションの作業・動作計画 / rosjp_planning_for_robotic_manipulation_20240521 ![[DL輪読会]Learning quadrupedal locomotion over challenging terrain](https://cdn.slidesharecdn.com/ss_thumbnails/dl20201029koheinishimura-201113025552-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Learning quadrupedal locomotion over challenging terrain クモ型ロボットにおける逆運動学計算
- 1.
- 2.
- 3.
- 5.
- 6.
どうせなら
モーション:自動生成
フレームレート :高
外界のフィードバック :モーション自動生成なので可
→楽しい!!✌(‘ω’✌ )三✌(‘ω’)✌三(✌‘ω’)✌
- 7.
でも制御用のプログラムも…
→楽しい!!✌( ◞‸◟✌)三✌(◞‸◟)✌三(✌◞‸◟)✌
ことになってしまう
複雑なシステムを構築する際の考え方
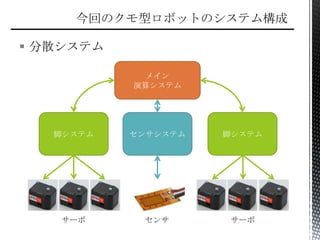
分散システム (システムを並列化) (´・ω・`)(´・ω・`)
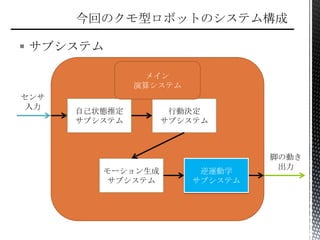
サブシステム (システムを入れ子状化)(´・(´・ω・`)・`)
双方を利用して,処理を分散・コンポーネント化
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.