Haptic Chameleon: ANew Concept of Shape-Changing
User Interface Controls with Force Feedback
G. Michelitsch, J. Williams, M. Osen, B. Jimenez, and S. Rapp
2015/05/29 橋爪智 #3鬼
どのようなものか?
形を変えることによるユーザーインターフェースの提
案
コンセプト
形と触覚を変えることによって、様々なものを便利に
するだろう。
• 実世界の物を真似して形が変わる。
• 選択肢の具現化
先行研究と比べてどこがすごいか?
それ自身の形が変わるだけでなく、ユーザーは掴むな
ど自由に扱っても構わない。
活用法
車の中のインターフェースがHaptic Chameleonであれ
ば、運転手は多くを見なくても操作ができる。
今後の展望
他の技術と組み合わせながらプロトタイプを作ってい
く
関連研究
Deformable Objects as Input Tools [Murakami et al.
2
FTL(electrical focus tunablelenses)
6DOF
7 2
Extended Depth-of-Field Projector by Fast Focal Sweep Projection
4
4
4
4
(IPSF) (SSIM) 2
2
3Image Pre-compensation: Balancing Contrast and Ringing
[Y. Ji, J. Ye, S. B. Kang, and J. Yu/CVPR2014]
IEEE VR 2015
4
2 5
2
36.
A Switchable LightField Camera Architecture
with Angle Sensitive Pixels and Dictionary-based Sparse Coding
4
4
4
4
4
5 2
2
CG 1 2
PSNR 2
2 3Compressive light field photography using overcomplete dictionaries and optimized projections
[K. Marwah, G. Wetzstein, Y. Bando, and R. Raskar / TOG2013]
ICCP2014
4
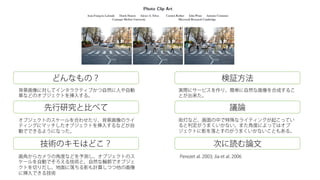
Learning to Selectand Order Vacation Photographs
4
4
4
4
42
2
9 63
5 2
2
/ 2
3Jointly aligning and segmenting multiple web photo streams for the inference of collective
photo storylines [G. Kim and E. P. Xing. / CVPR2013]
3Photo sequencing.
[T. Basha, Y. Moses, and S. Avidan.. / CVPR2012]
WACV2015
(Disney)
39.
The Shading Probe:Fast Appearance Acquisition for Mobile AR
4 4
AR 5
2
3Reciprocal shading for mixed reality
[KNECHT, M., TRAXLER, C., MATTAUSCH, O., AND WIMMER,M/ 2012]
3A single-shot light probe
[DEBEVEC, P., GRAHAM, P., BUSCH, J., AND BOLAS, M. / 2012]
SIGGRAPH Asisa 2013
(Disney)
40.
Modeling and Estimationof Internal Friction in Cloth
4
4
4
4
2
1 1
2
Dahl’s model 2
5 3D
1 5 2
3Folding and crumpling adaptive sheets
[NARAIN, R., PFAFF, T., AND O’BRIEN, J. F. / ACM Transactions on Graphics 2013]
3A solid friction model. Tech. rep., The Aerospace Corporation.
[DAHL, P. R. / 1968]
SIGGRAPH Asisa 2013
(Disney)
4
1
2
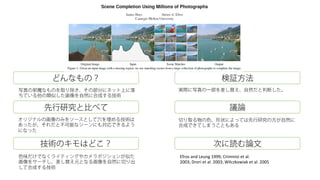
Manufacturing Layered Attenuatorsfor Multiple Prescribed Shadow Images
4
4
4
4
5
2
2
PSNR 2
PSNR 2
1
2
5 1
1 2
3Parallax stereogram and process of making same.
[IVES F. E. / 1903]
3Layered 3D: Tomographic image synthesis for
attenuation-based light field and high dynamic range displays
[WETZSTEIN G., LANMAN D., HEIDRICH W.,RASKAR R. / ACM Transactions
EUROGRAPHICS 2012
(Disney)
43.
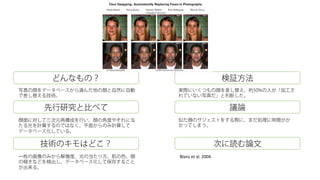
Modeling and AnimatingEye Blinks
4
4
4
4
4
5
2
( c) 1 ( b7
40 300fps
2 5 10 5
30fps 2
5 3Statistical models of appearance for eye tracking and eye-blink detection and measurement
[Bacivarov, I., Ionita, M., and Corcoran, / IEEE Transactions on Consumer Electronics 2008]
ACM Transactions 2011
(Disney)
4
1 5
2 2
44.
BetweenIT: An InteractiveTool for Tight Inbetweening
4
4
4
4
5 5 5 1
5 2
6 a,e b,c,d 6 77
5 1
5
1
5 2
3Proceedings of the 2nd international symposium on Nonphotorealistic animation and rendering
[KORT A. / MPAR2002]
Eurographics 2010
(Disney)
4
5 1 1
45.
A spatiotemporal super-resolutionalgorithm for a hybrid stereo video system
4
4
4
4
41
1
MOBILE 3DTV1Poznan 5 2
1
1 2
3 6SW-SSIM,LTG,PSNR7
5 5 1
5 5
3Super-resolution: a comprehensive survey.
[Nasrollahi,K., Moeslund, T.B / 2014]
3Subjective quality assessment of asymmetric stereoscopic 3D video.
Signal Image Video Process.
[Aflaki, P., Hannuksela, M.M., Gabbouj, M / 2015 ]
Signal, Image and Video Processing
Journal 2015
46.
SPATIOTEMPOR AL SEGMENTATIONFOR STEREOSCOPIC VIDEO
4
4
4
4
4
2 5 2
2 1 5
2 3Efficient hierarchical graph-based video segmentation
[Matthias Grundmann, Vivek K watra, Mei Han, and Irfan Essa,/ CVPR2010]
Quality of Multimedia Experience
2010
4
1 1 5
2
47.
Development of 480-fpsLED display by use of spatiotemporal mapping
4
4
4
480fps 5 5 LED
2
3D 1
2
1
2
3Parallax panoramagrams for viewing by reflected light
[H. E. Ives, / 1930]
3Viewing-Zone Control of Light-Emitting Diode Panel for Stereoscopic Display
and Multiple Viewing Distances
[H. Yamamoto, T. Kimura, S. Matsumoto, and S. Suyama / 2010]
IAS 2012
3 5
48.
Extracting 3D Layoutfrom a Single Image Using Global Image Structure
4
4
4
4
,
5 2
,
2
15 5 5 2
5 2000 2
5 12 5
2
5
2
TIP 2015
4
4
49.
Active Flattening ofCurved Document Image via Two Structured Beams
4
4
4
4
2
0
6 2
2 5 3Metric rectification of curved document images.
[G. Meng, C. Pan, S. Xiang, J. Duan, and N. Zheng / PAMI 2012]
CVPR2014
4
50.
Spatiotemporal Stereo Matchingfor Dynamic Scenes With Temporal Disparity Variation
90
0
50
0
6 0
6
6
9
5 9
,
5×5
5 6
6
7 5
2 1 belief propagation
Dense motion and disparity estimation via loopy belief propagation
[Michael Isard and John MacCormick / ACCV2006]
Non-parametric local transforms for computing visual correspondence
[Ramin Zabih and John Woodfill / ECCV1994]
Are we ready for autonomous driving? the kitti vision benchmark suite
[Andreas Geiger, Philip Lenz, and Raquel Urtasun/CVPR2012]
ICIP2013
51.
Evaluation of Super-VoxelMethods for Early Video Processing
90
0
50
0
6 0
1 1 2 8
7 3 5
4 9
8 1 9
5 5
3 1
5 1 1
8
Chellappa. Entropy rate superpixel segmentation.
[M.-Y. Liu, O. Tuzel, S. Ramalingam, and R. / CVPR2011]
CVPR2012
4 90
1 5
5
52.
Label Propagation fromImageNet to 3D Point Clouds
90
0
50
0
3D 9 ,
6
2D 1 9 1
1 5 9
Exemplar SVM graphical model
Segmentation Propagation in ImageNet
[D. Kuettel, M. Guillaumin, and V. Ferrari / ECCV2012]
Ensemble of Exemplar-SVMs for Object Detection and Beyond
[T. Malisiewicz, A. Gupta, and A. A. Efros / ICCV2011]
SIGGRAPH Asisa 2013
(Disney)
53.
Predicting Matchability
0
50
0
6 0
3D85
6
99
5
1000 1 (4fps) 1
1320 185°
Modeling and recognition of landmark image collections using iconic scene graphs.
[X. Li, C. Wu, C. Zach, S. Lazebnik, and J.-M. Frahm / ECCV2008]
Reconstructing the world from internet photos
[N. Snavely. BigSFM / http://www.cs.cornell.edu/projects/bigsfm , 2012]
CVPR2014
54.
Multiview Shape andReflectance from Natural Illumination
90
0
50
0
6 0
85 1
2 3 1 5 1 5
5
5 5
5
Color Constancy, Intrinsic Images, and Shape Estimation.
[J. Barron and J. Malik / ECCV2012]
Light Probe Image Gallery
[P. Debevec / http://www.pauldebevec.com/Probes/, 2012.]
CVPR2014
55.
Small Baseline Stereovision
90
0
50
0
60
5
5 5
6
1
Appariement fin d’images stéréoscopiques et instrument dédié avec un faible coefficient
stéréoscopique.
[Giros, A., Rougé, B., Vadon, H / 2004]
Journal of Mathematical
Imaging and Vision 2007
Gaze Estimation basedon 3D Face Structure and Pupil Centers
90
0
50
0
6 0
1
5 9
5
6
5
Combining head pose and eye location information for gaze estimation
[R. Valenti, N. Sebe, and T. Gevers, / IEEE T-IP2012]
ICPR2014
4 90
9 5 5
4 0
58.
Multi-UAV-based stereo visionsystem without GPS for ground
obstacle mapping to assist path planning of UGV
0
0
(UAV) 1
GPS 5 5
7 1
Collaborative navigation of UAV and UGV using vision and LIDAR sensors’
[Kim, J.H., Bae, I., Quan, C.H., Lee, S.H., Son, P.W., Rhee, J.H., Kim, S.,and Seo, J / 2013]
An aerialground robotic system for navigation and obstacle mapping in large outdoor areas
[Garzon, M., Valente, J., Zapata, D., and Barrientos, A / 2013]
ELECTRONICS LETTERS 2014
4 90
1 5
5 640×480 4
5 9
4
6 0
2.7 1 1
59.
Revisiting Depth Layersfrom Occlusions
900
4 90
0
6 0
5
1 2 39
6 0
24 6 18
[7] 1 6 ”Sound of
music”9
9 1
1
1
Probabilistic multi-view dynamic scene reconstruction and occlusion reasoning from
silhouette cues
[L. Guan, J. Franco, and M. Pollefeys / IJCV2010]
CVPR2014
![201211106 河原圭佑 #3 (人間)
Extension Sticker : A Method for Transferring External
Touch Input Using a Striped Pattern Sticker
Kunihiro Kato Homei Miyashita UIST 2014
何をしたか
縞模様の導電性インクのシールを使うことで,
スマートフォンの画面に直接触っていなくても,
タッチイベントやスワイプイベントを生成でき
る手法の提案
何が新しい
同じようにタッチパネルに導電性の何かを付け
て, 拡張して操作できる研究はあったが,
導電性インクを使ってプリントすることで, ユー
ザ自身が簡単にインターフェイスを設計できる.
やりのこしてること
一次元しかできてないから, 任意のx-yの点
をタッチできるメカニズム.
次
Clip-on Gadget [UIST 11]](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-1-320.jpg)
![201211106 河原圭佑 #3 (人間)
Clip-on Gadgets : Expanding Multi-touch
Interaction Area with Unpowered Tactile Controls
Neng-Hao Yu1, Sung-Sheng Tsai2, I-Chun Hsiao2, Dian-Je Tsai1, Meng-Han Lee2, Mike Y. Chen1,2, Yi-Ping Hung1,2 UIST11
何をしたか
スマートフォン画面のバーチャルキーボードやバーチャ
ルゲームパッドは触覚フィードバックが無い & 画面上
のコンテンツに手が重なって, 見えなくなる.
→ ディスプレイ外部に付けられる導電性の操作ボタン
他の例は?
Bluetooth接続のコントローラ → バッテリーが必要
つぎ
TUIC [CHI 2011]
アプリケーション](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-2-320.jpg)


















![wUbi-Pen : Windows Graphical User Interface
Interacting with Haptic Feedback Stylus
Ki-Uk Kyung , Jun-Young Lee
どのようなものか?
鉛筆タイプの触覚インターフェース
先行研究と比べてどこがすごいか?
ディスプレイに装置が組み込まれているわけではない
ので、各端末ごとに適応させる必要はない
技術や手法のキモ
様々な触覚を一つのデバイスに搭載した。
vibrator, impact(linear vibrator), speaker, texture(3*3
pin array), microphone
Type 2はtexture feedbackをなくした代わりに
microphoneを搭載し、軽量化をした。
活用法
●Windows Interface
Button Clicking : impact, Menu Selection :
vibration and impact , Scroll : tactile bit etc..
●pin array を使用することで、tactile pattern
displayが実現できる
関連研究
Ubi-Pen [Kyung & Lee, 2008].
2015/05/29 橋爪智 #3鬼](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-27-320.jpg)

![MudPad: Tactile Feedback and Haptic Texture
Overlay for Touch Surfaces
Yvonne Jansen, Thorsten Karrer, Jan Borchers
2015/05/29 橋爪智 #3鬼
どのようなものか?
マルチタッチに対応した、電磁石を用いたアクティブ
触覚フィードバック
先行研究と比べてどこがすごいか?
レスポンスが早く、マルチタッチに対応
技術や手法のキモ
電磁石をアレイ状に配置。それぞれ独立して操作可能
+ マルチタッチセンシング層
+ fluid-filled pouch : 電磁石の磁力によって、中の液
体の粘度が変わる。
+ ラテックスカバー
活用法
Virtual Keyboard : キーの位置が識別しやすくなる
Music Sequencer
Secure Touchpad Input : 触感はプライベート
今後の展望
テスト環境を作って有効性の確認
関連研究
TeslaTouch[Bau et al. 2010]](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-29-320.jpg)


![Novel Tactile Display for Emotional Tactile Experience
Yuki HASHIMOTO , Satsuki NAKATA , Hiroyuki KAJIMOTO
2015/05/29 橋爪智 #3鬼
どのようなものか?
スピーカーを使って、感情を伝えるデバイス
先行研究と比べてどこがすごいか?
感情を伝えることができる。
引く押す、両方の力を再現できる。
技術や手法のキモ
音:永久的に使えて低解像度
スピーカーを手に持ち、コーンの押し引きで触感を与
える
活用法
Sense of Being Alive : 人工的ないきものの感情を表す。
実験では心拍と呼吸を表現した。
Tactile Communication : 人間同士の自然な触覚コミュ
ニケーション。利用者の動作を伝えたり、手の握り強
さなどを伝える。
Realistic Physical Sensation : 物理的な触感を再現する
(ex スライムの動き)
関連研究
Hapticat [Yohanan et al. 2005]](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-33-320.jpg)
![HaptoMime: Mid-Air Haptic Interaction with a Floating Virtual Screen
Yasuaki Monnai, Keisuke Hasegawa, Masahiro Fujiwara,
Kazuma Yoshino, Seki Inoue, Hiroyuki Shinoda
2015/05/29 橋爪智 #3鬼
どのようなものか?
空中インタラクションシステム
先行研究と比べてどこがすごいか?
ハンズフリーで空中のバーチャルスクリーンに触感を
与えることができる。
技術や手法のキモ
Aerial Imaging Plate : corner-reflector arrayを有する透
過鏡
IR touch sensor , LCD
ultrasonic phased array transducer : 高速度、高解像度、
比較的長い距離でも大丈夫。焦点位置を移動させて、
触感を指先に与える。
活用法
仮想的なスクリーンなのでセキュア。手が汚れていた
り、濡れていても大丈夫。空中に絵が描ける。
関連研究
Non-contact method for producing tactile sensation
using airborne ultrasound[Iwamoto et al. 2008]](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-34-320.jpg)
![2
FTL(electrical focus tunable lenses)
6DOF
7 2
Extended Depth-of-Field Projector by Fast Focal Sweep Projection
4
4
4
4
(IPSF) (SSIM) 2
2
3Image Pre-compensation: Balancing Contrast and Ringing
[Y. Ji, J. Ye, S. B. Kang, and J. Yu/CVPR2014]
IEEE VR 2015
4
2 5
2](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-35-320.jpg)
![A Switchable Light Field Camera Architecture
with Angle Sensitive Pixels and Dictionary-based Sparse Coding
4
4
4
4
4
5 2
2
CG 1 2
PSNR 2
2 3Compressive light field photography using overcomplete dictionaries and optimized projections
[K. Marwah, G. Wetzstein, Y. Bando, and R. Raskar / TOG2013]
ICCP2014
4](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-36-320.jpg)

![Learning to Select and Order Vacation Photographs
4
4
4
4
42
2
9 63
5 2
2
/ 2
3Jointly aligning and segmenting multiple web photo streams for the inference of collective
photo storylines [G. Kim and E. P. Xing. / CVPR2013]
3Photo sequencing.
[T. Basha, Y. Moses, and S. Avidan.. / CVPR2012]
WACV2015
(Disney)](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-38-320.jpg)
![The Shading Probe: Fast Appearance Acquisition for Mobile AR
4 4
AR 5
2
3Reciprocal shading for mixed reality
[KNECHT, M., TRAXLER, C., MATTAUSCH, O., AND WIMMER,M/ 2012]
3A single-shot light probe
[DEBEVEC, P., GRAHAM, P., BUSCH, J., AND BOLAS, M. / 2012]
SIGGRAPH Asisa 2013
(Disney)](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-39-320.jpg)
![Modeling and Estimation of Internal Friction in Cloth
4
4
4
4
2
1 1
2
Dahl’s model 2
5 3D
1 5 2
3Folding and crumpling adaptive sheets
[NARAIN, R., PFAFF, T., AND O’BRIEN, J. F. / ACM Transactions on Graphics 2013]
3A solid friction model. Tech. rep., The Aerospace Corporation.
[DAHL, P. R. / 1968]
SIGGRAPH Asisa 2013
(Disney)
4
1
2](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-40-320.jpg)
![SHADOWPIX: Multiple Images from Self Shadowing
4
4
2
23D
2 8
3Reliefs as images.
[ALEXA M., MATUSIK W / ACM 2010]
EUROGRAPHICS 2012
(Disney)
4
6 7 2
2
4
PSNR](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-41-320.jpg)
![Manufacturing Layered Attenuators for Multiple Prescribed Shadow Images
4
4
4
4
5
2
2
PSNR 2
PSNR 2
1
2
5 1
1 2
3Parallax stereogram and process of making same.
[IVES F. E. / 1903]
3Layered 3D: Tomographic image synthesis for
attenuation-based light field and high dynamic range displays
[WETZSTEIN G., LANMAN D., HEIDRICH W.,RASKAR R. / ACM Transactions
EUROGRAPHICS 2012
(Disney)](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-42-320.jpg)
![Modeling and Animating Eye Blinks
4
4
4
4
4
5
2
( c) 1 ( b7
40 300fps
2 5 10 5
30fps 2
5 3Statistical models of appearance for eye tracking and eye-blink detection and measurement
[Bacivarov, I., Ionita, M., and Corcoran, / IEEE Transactions on Consumer Electronics 2008]
ACM Transactions 2011
(Disney)
4
1 5
2 2](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-43-320.jpg)
![BetweenIT: An Interactive Tool for Tight Inbetweening
4
4
4
4
5 5 5 1
5 2
6 a,e b,c,d 6 77
5 1
5
1
5 2
3Proceedings of the 2nd international symposium on Nonphotorealistic animation and rendering
[KORT A. / MPAR2002]
Eurographics 2010
(Disney)
4
5 1 1](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-44-320.jpg)
![A spatiotemporal super-resolution algorithm for a hybrid stereo video system
4
4
4
4
41
1
MOBILE 3DTV1Poznan 5 2
1
1 2
3 6SW-SSIM,LTG,PSNR7
5 5 1
5 5
3Super-resolution: a comprehensive survey.
[Nasrollahi,K., Moeslund, T.B / 2014]
3Subjective quality assessment of asymmetric stereoscopic 3D video.
Signal Image Video Process.
[Aflaki, P., Hannuksela, M.M., Gabbouj, M / 2015 ]
Signal, Image and Video Processing
Journal 2015](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-45-320.jpg)
![SPATIOTEMPOR AL SEGMENTATION FOR STEREOSCOPIC VIDEO
4
4
4
4
4
2 5 2
2 1 5
2 3Efficient hierarchical graph-based video segmentation
[Matthias Grundmann, Vivek K watra, Mei Han, and Irfan Essa,/ CVPR2010]
Quality of Multimedia Experience
2010
4
1 1 5
2](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-46-320.jpg)
![Development of 480-fps LED display by use of spatiotemporal mapping
4
4
4
480fps 5 5 LED
2
3D 1
2
1
2
3Parallax panoramagrams for viewing by reflected light
[H. E. Ives, / 1930]
3Viewing-Zone Control of Light-Emitting Diode Panel for Stereoscopic Display
and Multiple Viewing Distances
[H. Yamamoto, T. Kimura, S. Matsumoto, and S. Suyama / 2010]
IAS 2012
3 5](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-47-320.jpg)

![Active Flattening of Curved Document Image via Two Structured Beams
4
4
4
4
2
0
6 2
2 5 3Metric rectification of curved document images.
[G. Meng, C. Pan, S. Xiang, J. Duan, and N. Zheng / PAMI 2012]
CVPR2014
4](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-49-320.jpg)
![Spatiotemporal Stereo Matching for Dynamic Scenes With Temporal Disparity Variation
90
0
50
0
6 0
6
6
9
5 9
,
5×5
5 6
6
7 5
2 1 belief propagation
Dense motion and disparity estimation via loopy belief propagation
[Michael Isard and John MacCormick / ACCV2006]
Non-parametric local transforms for computing visual correspondence
[Ramin Zabih and John Woodfill / ECCV1994]
Are we ready for autonomous driving? the kitti vision benchmark suite
[Andreas Geiger, Philip Lenz, and Raquel Urtasun/CVPR2012]
ICIP2013](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-50-320.jpg)
![Evaluation of Super-Voxel Methods for Early Video Processing
90
0
50
0
6 0
1 1 2 8
7 3 5
4 9
8 1 9
5 5
3 1
5 1 1
8
Chellappa. Entropy rate superpixel segmentation.
[M.-Y. Liu, O. Tuzel, S. Ramalingam, and R. / CVPR2011]
CVPR2012
4 90
1 5
5](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-51-320.jpg)
![Label Propagation from ImageNet to 3D Point Clouds
90
0
50
0
3D 9 ,
6
2D 1 9 1
1 5 9
Exemplar SVM graphical model
Segmentation Propagation in ImageNet
[D. Kuettel, M. Guillaumin, and V. Ferrari / ECCV2012]
Ensemble of Exemplar-SVMs for Object Detection and Beyond
[T. Malisiewicz, A. Gupta, and A. A. Efros / ICCV2011]
SIGGRAPH Asisa 2013
(Disney)](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-52-320.jpg)
![Predicting Matchability
0
50
0
6 0
3D 85
6
99
5
1000 1 (4fps) 1
1320 185°
Modeling and recognition of landmark image collections using iconic scene graphs.
[X. Li, C. Wu, C. Zach, S. Lazebnik, and J.-M. Frahm / ECCV2008]
Reconstructing the world from internet photos
[N. Snavely. BigSFM / http://www.cs.cornell.edu/projects/bigsfm , 2012]
CVPR2014](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-53-320.jpg)
![Multiview Shape and Reflectance from Natural Illumination
90
0
50
0
6 0
85 1
2 3 1 5 1 5
5
5 5
5
Color Constancy, Intrinsic Images, and Shape Estimation.
[J. Barron and J. Malik / ECCV2012]
Light Probe Image Gallery
[P. Debevec / http://www.pauldebevec.com/Probes/, 2012.]
CVPR2014](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-54-320.jpg)
![Small Baseline Stereovision
90
0
50
0
6 0
5
5 5
6
1
Appariement fin d’images stéréoscopiques et instrument dédié avec un faible coefficient
stéréoscopique.
[Giros, A., Rougé, B., Vadon, H / 2004]
Journal of Mathematical
Imaging and Vision 2007](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-55-320.jpg)
![Parallax-tolerant Image Stitching
0
50
0
6 0
5 5 5
Photoshop, AutoStitch,as-projective-as-possible
stitching(APAP) 6
Smoothly varying affine stitching
[W.-Y. Lin, S. Liu, Y.Matsushita, T.-T. Ng, and L.-F. Cheong / CVPR2011]
CVPR2014
4 90
5 5 6](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-56-320.jpg)
![Gaze Estimation based on 3D Face Structure and Pupil Centers
90
0
50
0
6 0
1
5 9
5
6
5
Combining head pose and eye location information for gaze estimation
[R. Valenti, N. Sebe, and T. Gevers, / IEEE T-IP2012]
ICPR2014
4 90
9 5 5
4 0](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-57-320.jpg)
![Multi-UAV-based stereo vision system without GPS for ground
obstacle mapping to assist path planning of UGV
0
0
(UAV) 1
GPS 5 5
7 1
Collaborative navigation of UAV and UGV using vision and LIDAR sensors’
[Kim, J.H., Bae, I., Quan, C.H., Lee, S.H., Son, P.W., Rhee, J.H., Kim, S.,and Seo, J / 2013]
An aerialground robotic system for navigation and obstacle mapping in large outdoor areas
[Garzon, M., Valente, J., Zapata, D., and Barrientos, A / 2013]
ELECTRONICS LETTERS 2014
4 90
1 5
5 640×480 4
5 9
4
6 0
2.7 1 1](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-58-320.jpg)
![Revisiting Depth Layers from Occlusions
900
4 90
0
6 0
5
1 2 39
6 0
24 6 18
[7] 1 6 ”Sound of
music”9
9 1
1
1
Probabilistic multi-view dynamic scene reconstruction and occlusion reasoning from
silhouette cues
[L. Guan, J. Franco, and M. Pollefeys / IJCV2010]
CVPR2014](https://image.slidesharecdn.com/ftma1503oni-150704120145-lva1-app6892/85/FTMA15-59-320.jpg)















![[DL輪読会]A Hierarchical Latent Vector Model for Learning Long-Term Structure in...](https://cdn.slidesharecdn.com/ss_thumbnails/180810musicvae-181026012108-thumbnail.jpg?width=640&height=640&fit=bounds)











































