Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
HirakuTOIDA
PDF, PPTX
1,719 views
ロケット交流会2012
人力飛行機の電装系 ・Team'F'の計器の紹介 ・計測データ例 ・電装標準化計画
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PPTX
人力飛行機の試験飛行におけるインシデントおよび対策 20th sss
by
Fukami Yuji
PPTX
人力飛行機の試験飛行におけるインシデントおよび対策20thSSS
by
Fukami Yuji
PPTX
HPA飛行会2015 開催報告 第21回sss 公開用
by
HPAhikoukai
PDF
ロケット交流会2013
by
HirakuTOIDA
PDF
Abstract yamagata g
by
harmonylab
PDF
iTamabi 13 第8回:ARTSAT API 実践 2 衛星アプリを企画する
by
Atsushi Tadokoro
PDF
kadota b
by
harmonylab
PPTX
交流会講演@金沢工業大学
by
Fukami Yuji
人力飛行機の試験飛行におけるインシデントおよび対策 20th sss
by
Fukami Yuji
人力飛行機の試験飛行におけるインシデントおよび対策20thSSS
by
Fukami Yuji
HPA飛行会2015 開催報告 第21回sss 公開用
by
HPAhikoukai
ロケット交流会2013
by
HirakuTOIDA
Abstract yamagata g
by
harmonylab
iTamabi 13 第8回:ARTSAT API 実践 2 衛星アプリを企画する
by
Atsushi Tadokoro
kadota b
by
harmonylab
交流会講演@金沢工業大学
by
Fukami Yuji
Viewers also liked
PDF
航空力学基礎の基礎
by
Fumiya Watanabe
PPTX
オープンソースによるドローン開発の概要( #ABC2015S )
by
博宣 今村
PDF
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
PDF
深層学習時代の自然言語処理
by
Yuya Unno
PDF
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
PDF
Black Belt Online Seminar AWS Amazon RDS
by
Amazon Web Services Japan
PPTX
ドローンの仕組み( #ABC2015S )
by
博宣 今村
PPTX
クモ型ロボットにおける逆運動学計算
by
Teng Tokoro
PDF
小さくて賢いロボット『マイクロマウス』を作ろう!
by
Teng Tokoro
PDF
MATLABの3Dプロットを簡単にする
by
Teng Tokoro
PDF
論文紹介 Semi-supervised Learning with Deep Generative Models
by
Seiya Tokui
PDF
ドローン・イノベーション
by
信良 小寺
PPTX
ジャパンドローンセミナー
by
Masayuki Isobe
PPTX
Drone Space Defence
by
Kensei Demura
PPTX
ドローンと風について
by
Hiroshi Makino
PDF
北部九州における産学連携による小型電気飛行機の開発
by
platinumhandbook
航空力学基礎の基礎
by
Fumiya Watanabe
オープンソースによるドローン開発の概要( #ABC2015S )
by
博宣 今村
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
深層学習時代の自然言語処理
by
Yuya Unno
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
Black Belt Online Seminar AWS Amazon RDS
by
Amazon Web Services Japan
ドローンの仕組み( #ABC2015S )
by
博宣 今村
クモ型ロボットにおける逆運動学計算
by
Teng Tokoro
小さくて賢いロボット『マイクロマウス』を作ろう!
by
Teng Tokoro
MATLABの3Dプロットを簡単にする
by
Teng Tokoro
論文紹介 Semi-supervised Learning with Deep Generative Models
by
Seiya Tokui
ドローン・イノベーション
by
信良 小寺
ジャパンドローンセミナー
by
Masayuki Isobe
Drone Space Defence
by
Kensei Demura
ドローンと風について
by
Hiroshi Makino
北部九州における産学連携による小型電気飛行機の開発
by
platinumhandbook
Recently uploaded
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
ロケット交流会2012
1.
人力飛行機の電装系 ○ 樋田 啓
(Team’F’) 2012/11/04 ロケット交流会2012@早稲田大学
2.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 2 概要 1. 人力飛行機の計測システム 2. 開発した計器 3. 計測例 飛行ログ 後処理結果 4. 電装標準化計画 5. まとめ
3.
ロケット交流会2012 2012/11/04
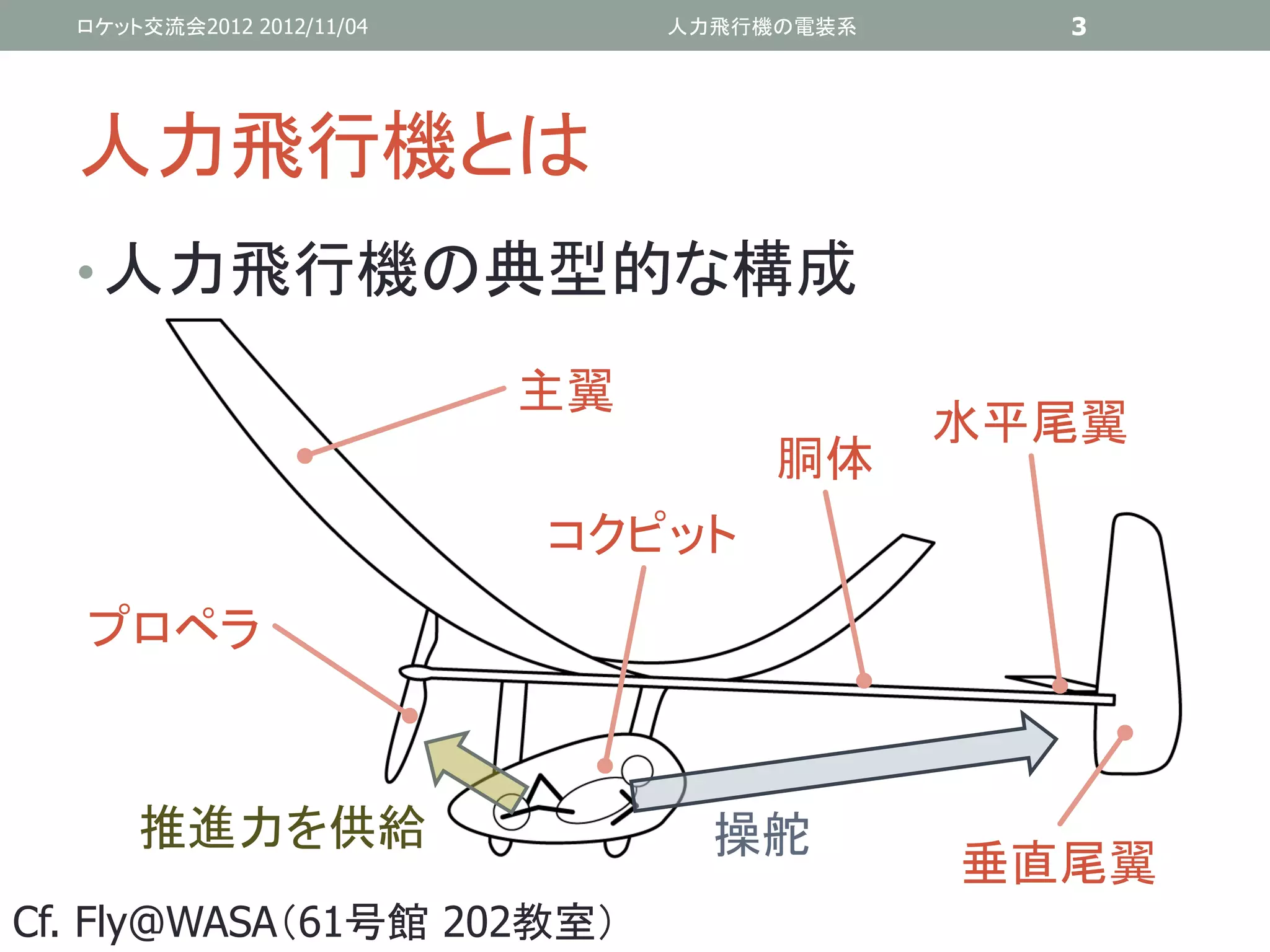
人力飛行機の電装系 3 人力飛行機とは • 人力飛行機の典型的な構成 主翼 水平尾翼 胴体 コクピット プロペラ 推進力を供給 操舵 垂直尾翼 Cf. Fly@WASA(61号館 202教室)
4.
ロケット交流会2012 2012/11/04
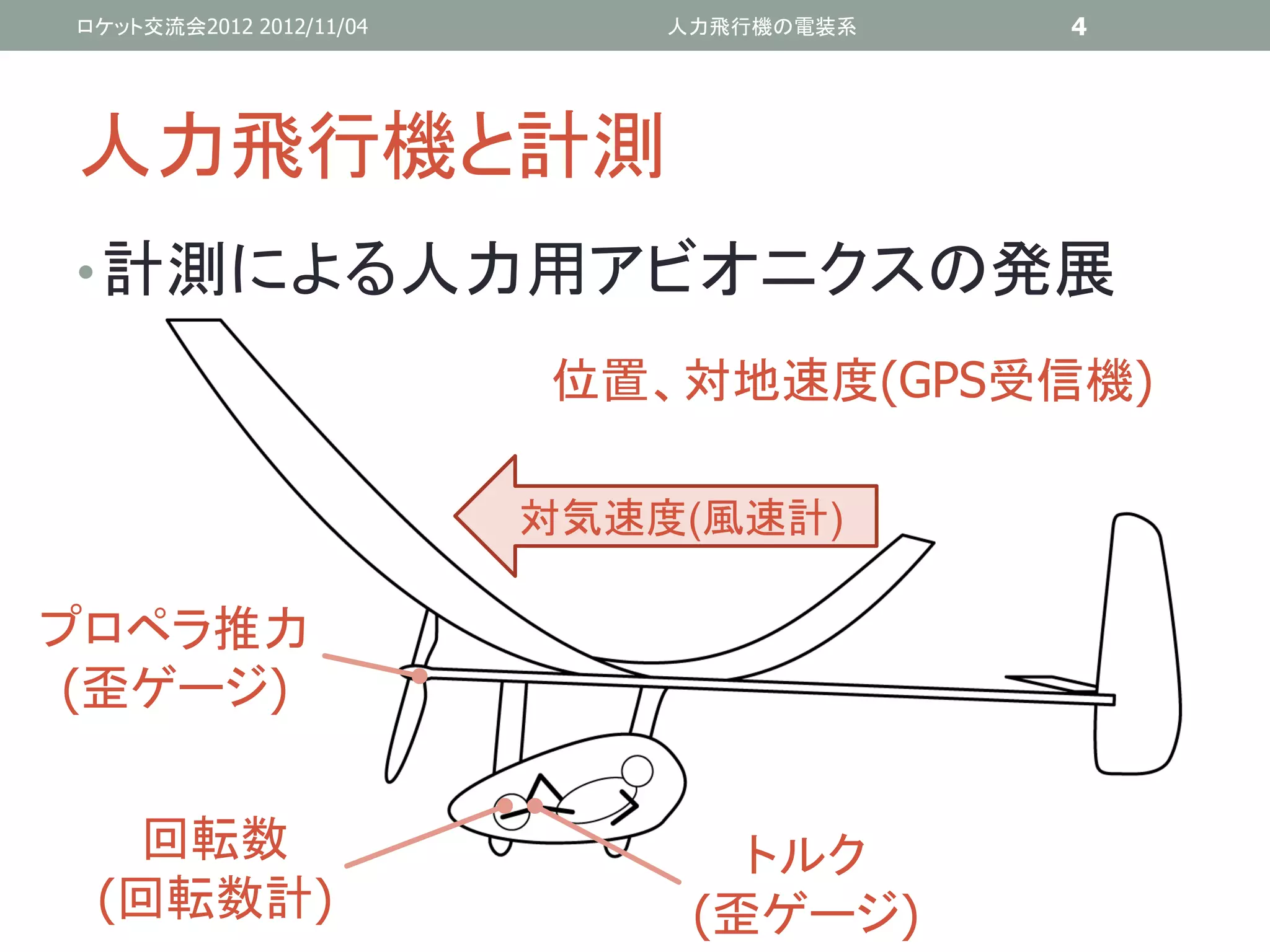
人力飛行機の電装系 4 人力飛行機と計測 • 計測による人力用アビオニクスの発展 位置、対地速度(GPS受信機) 対気速度(風速計) プロペラ推力 (歪ゲージ) 回転数 トルク (回転数計) (歪ゲージ)
5.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 5 それでも貧弱なアビオニクス • 一般の航空機と比較して特に劣る要素 • 精度よく航空機の状態を知るための機器 • パイロットを支援するための各種表示機器 姿勢は? 『どう飛んでいるの?』 (表示機器)
6.
ロケット交流会2012 2012/11/04
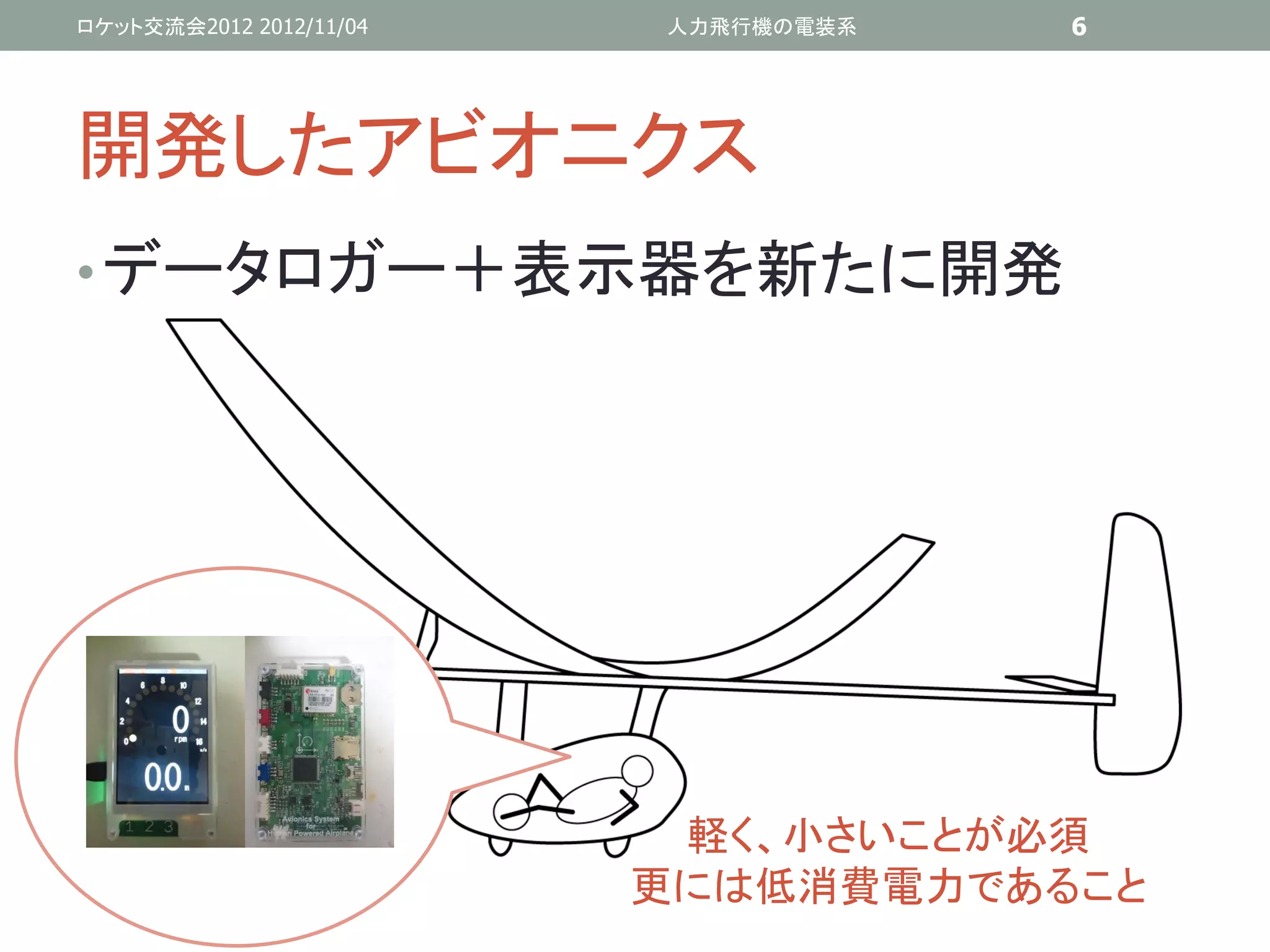
人力飛行機の電装系 6 開発したアビオニクス • データロガー+表示器を新たに開発 軽く、小さいことが必須 更には低消費電力であること
7.
ロケット交流会2012 2012/11/04
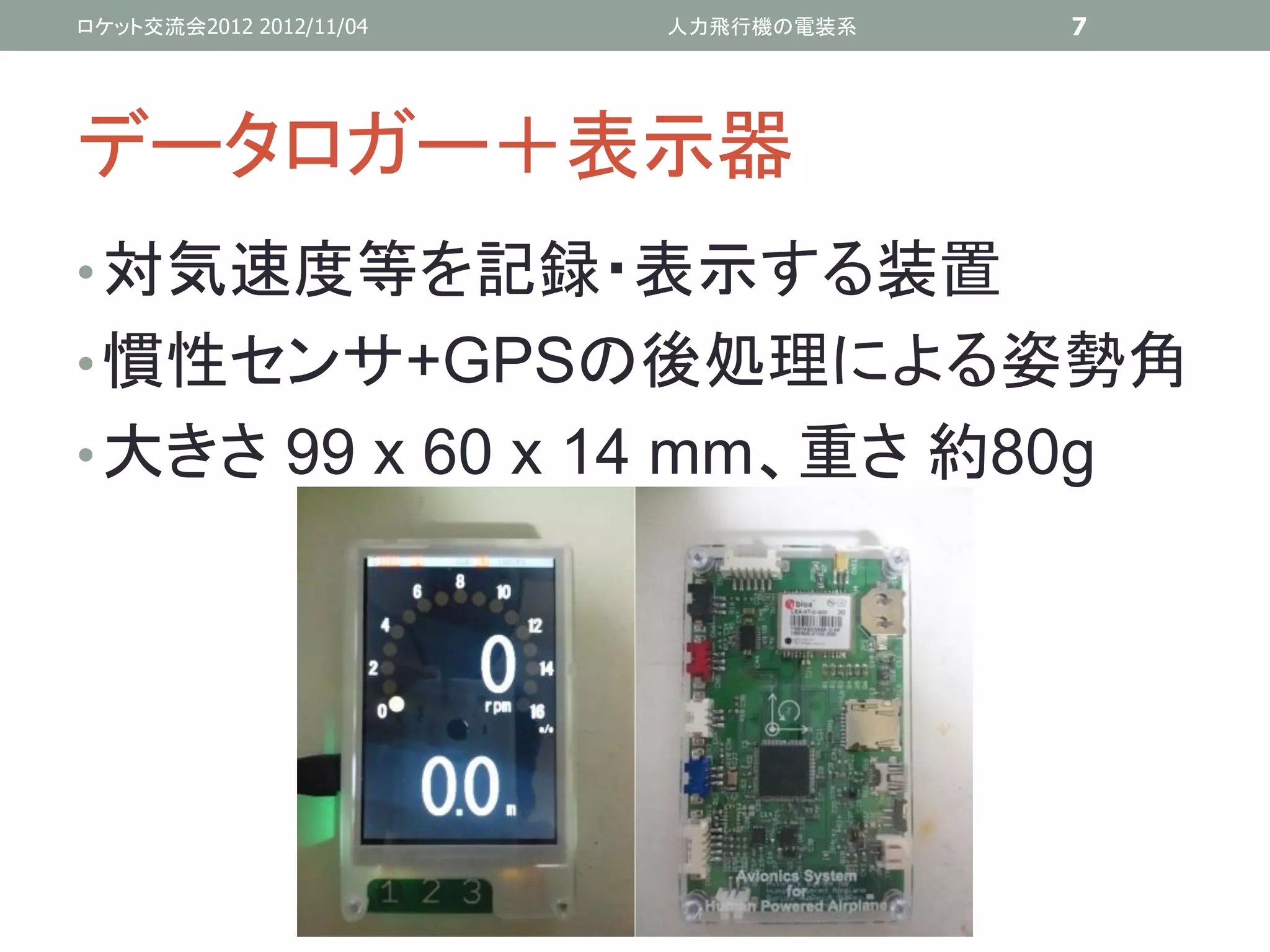
人力飛行機の電装系 7 データロガー+表示器 • 対気速度等を記録・表示する装置 • 慣性センサ+GPSの後処理による姿勢角 • 大きさ 99 x 60 x 14 mm、重さ 約80g
8.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 8 計測システムの構成
9.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 9 計測例(1): フライトデータの収集
10.
ロケット交流会2012 2012/11/04
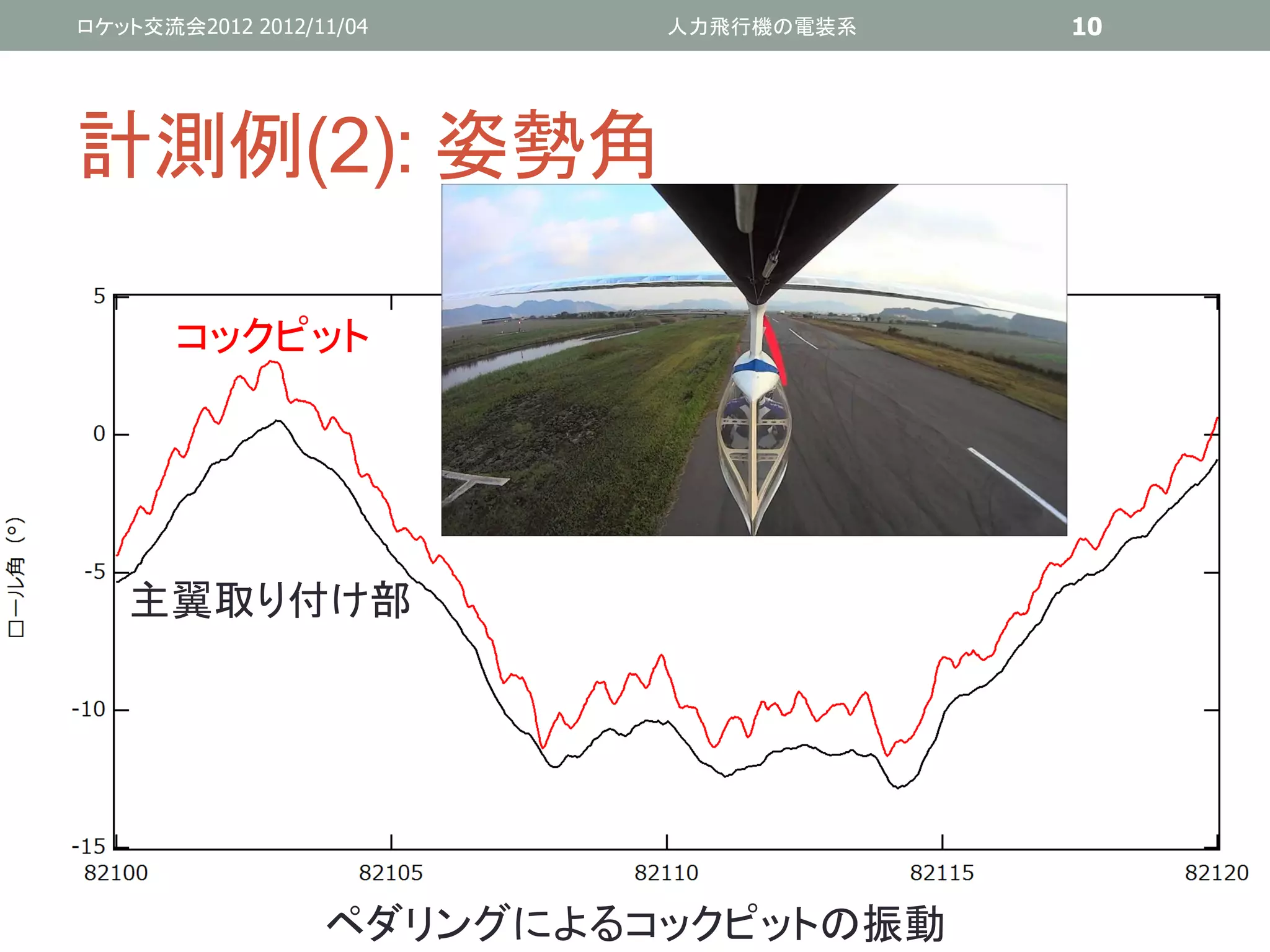
人力飛行機の電装系 10 計測例(2): 姿勢角 コックピット 主翼取り付け部 ペダリングによるコックピットの振動
11.
ロケット交流会2012 2012/11/04
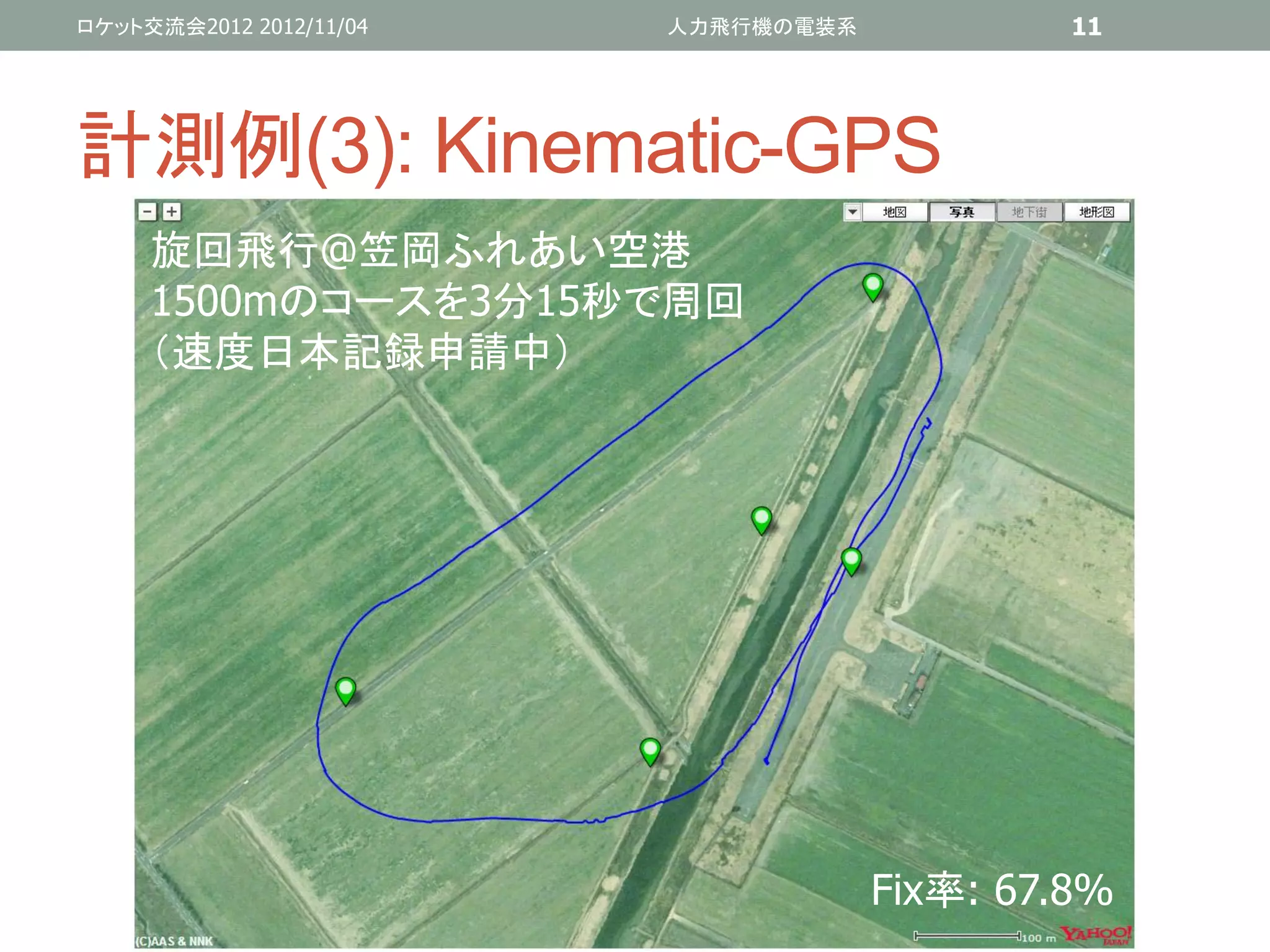
人力飛行機の電装系 11 計測例(3): Kinematic-GPS 旋回飛行@笠岡ふれあい空港 1500mのコースを3分15秒で周回 (速度日本記録申請中) Fix率: 67.8%
12.
ロケット交流会2012 2012/11/04
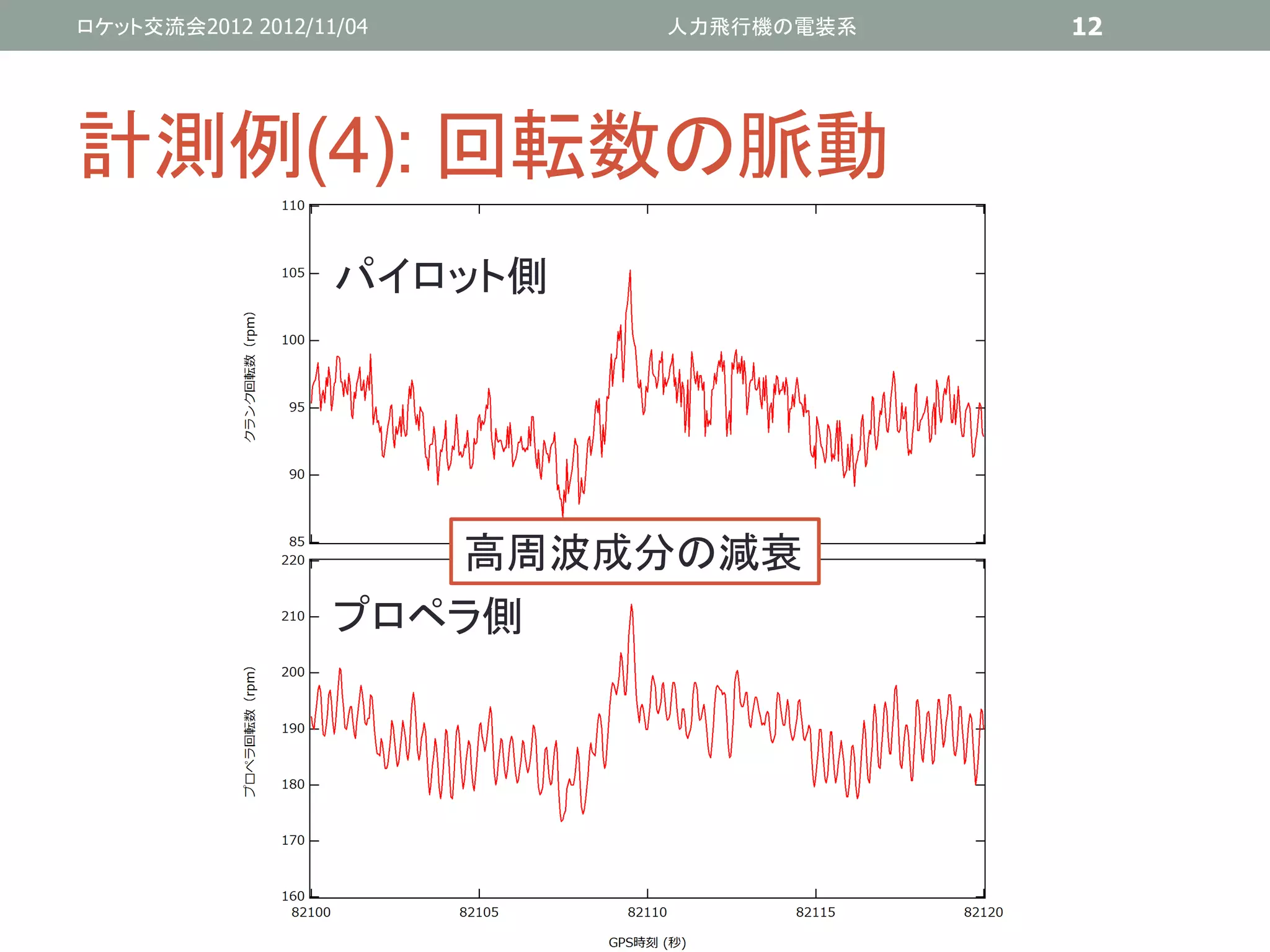
人力飛行機の電装系 12 計測例(4): 回転数の脈動 パイロット側 高周波成分の減衰 プロペラ側
13.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 13 人力飛行機の電装系の課題 • 同じようなものを毎年作り直している • 同じような失敗を繰り返す • ログが取得できれば御の字? • 解析はあまり行われていない? • 勉強のため? データのため? • 単にデータが欲しいだけでも労力がかかる
14.
ロケット交流会2012 2012/11/04
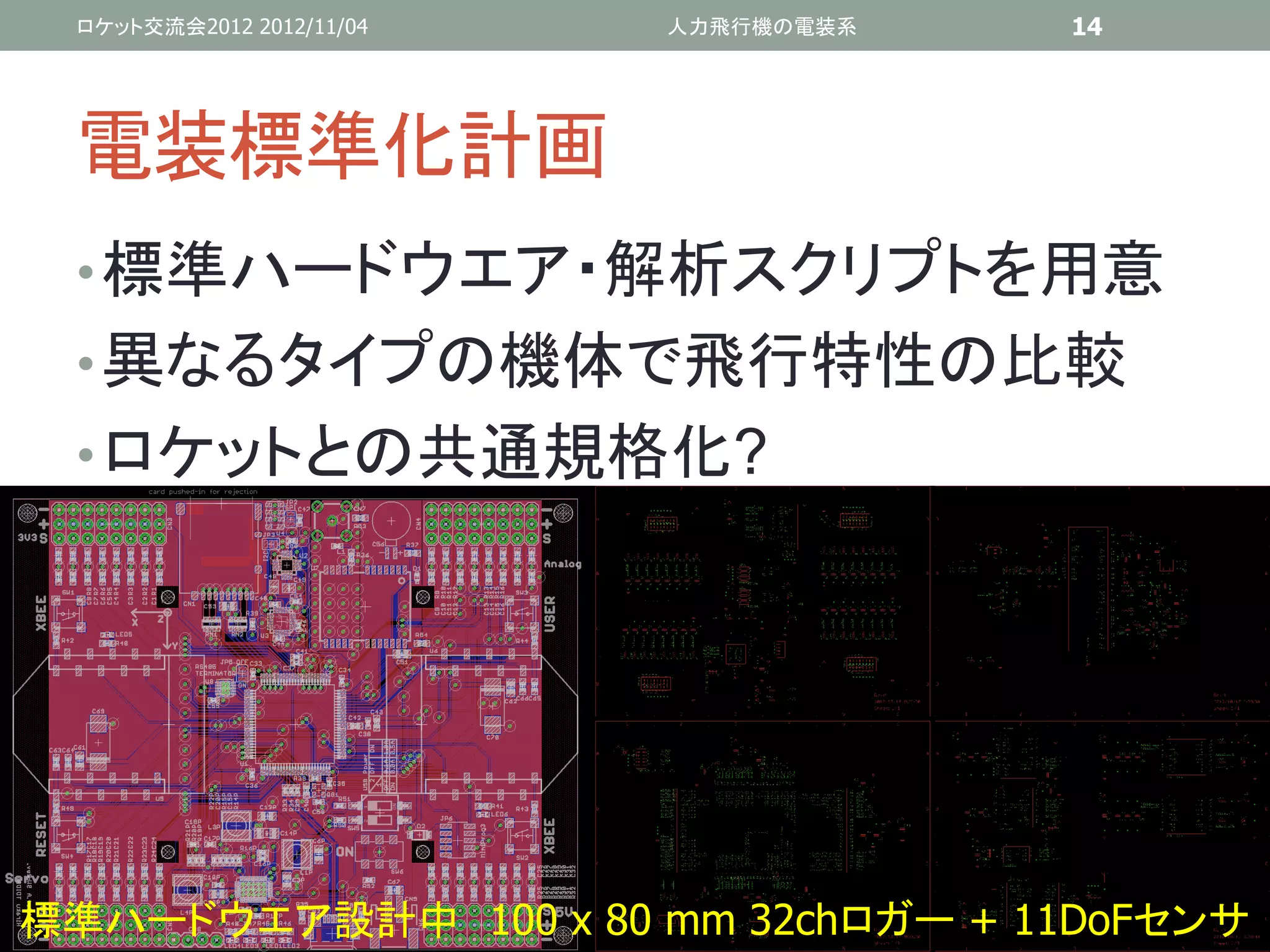
人力飛行機の電装系 14 電装標準化計画 • 標準ハードウエア・解析スクリプトを用意 • 異なるタイプの機体で飛行特性の比較 • ロケットとの共通規格化? 標準ハードウエア設計中 100 x 80 mm 32chロガー + 11DoFセンサ
15.
ロケット交流会2012 2012/11/04
人力飛行機の電装系 15 まとめ • 姿勢角を含むフライトログを収集 • カラー液晶による表示器を作製 • 電装系の標準化?
Download