Download as PDF, PPTX


![③Processingから回転数を変更する
int
speed;
void
setup(){
Serial.begin(9600);
//シリアル通信を9600bpsで開始
}
void
loop(){
//シリアル通信で送られてきたデータがあれば以下を実行
if
(Serial.available()>0){
speed
=
Serial.read();
//変数speedに受信した値を入れる
analogWrite(6,
speed);
//回転数=speedでモーターを回転させる
digitalWrite(5,
LOW);
}
}
!
!
Arduino
dcmotor_̲3.ino
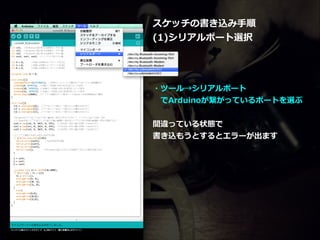
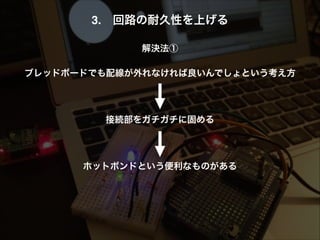
シリアルで受信した値を回転数に使うスケッチ
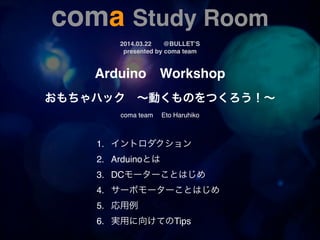
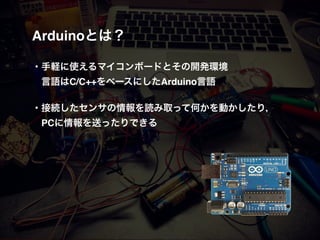
・シリアル通信でProcessingからモーターの回転数を制御してみます
・Processingを使うことでキーやGUIによる制御が簡単にできます
import
processing.serial.*;
//シリアル通信ライブラリのインポート
Serial
myPort;
//オブジェクト変数の宣言
int
ArduinoPortNum
=
5;
//コンソールに表示されたポート番号に設定
int
speed;
//回転数の変数
void
setup(){
frameRate(30);
//画面のフレームレートを30fpsに
size(255,
300);
//画面サイズの設定
println(Serial.list());
//コンソールにポート一覧を表示
//ポート番号ArduinoPortNumを9600bpsでオープンする
myPort
=
new
Serial(this,
Serial.list()[ArduinoPortNum],
9600);
}
void
draw(){
background(100,250,250);
stroke(255);
line(0,235,250,235);
//マウスX座標を回転数の値に使う
speed
=
mouseX;
//スライダーとして円を表示
fill(0,110,220);
ellipse(mouseX,235,10,10);
//画面に回転数の値を表示する
textAlign(CENTER,
CENTER);
text("speed",width/2,80);
text(speed,width/2,100);
//回転数の値を送信
myPort.write(speed);
}
! !
!
Processing
dcmotorController.pde
マウス座標をArduinoに送信するスケッチ
シリアル通信については前回ワークショップ資料により詳細な説明があります!
ので参考にしてみてください
http://coma.io/coma-study-room-vol-1/
マウスを動かすと
モーターの回転数が変わります](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-25-320.jpg)
![②Processingからサーボを動かす
#include
<Servo.h>
//サーボライブラリを使用する
Servo
servo0;
//インスタンスservo0を作る
int
deg;
//角度の変数degを宣言
void
setup(){
servo0.attach(2);
//サーボモータ信号線をつなぐピンを2番ピンに指定
Serial.begin(9600);
//シリアル通信を9600bpsで開始
}
void
loop(){
//シリアル通信で送られてきたデータがあれば以下を実行
if
(Serial.available()>0){
deg
=
Serial.read();
//シリアル通信で送られてきたデータをdegに代入
servo0.write(deg);
//サーボモータの回転角度をdegにセット
}
}
!
!
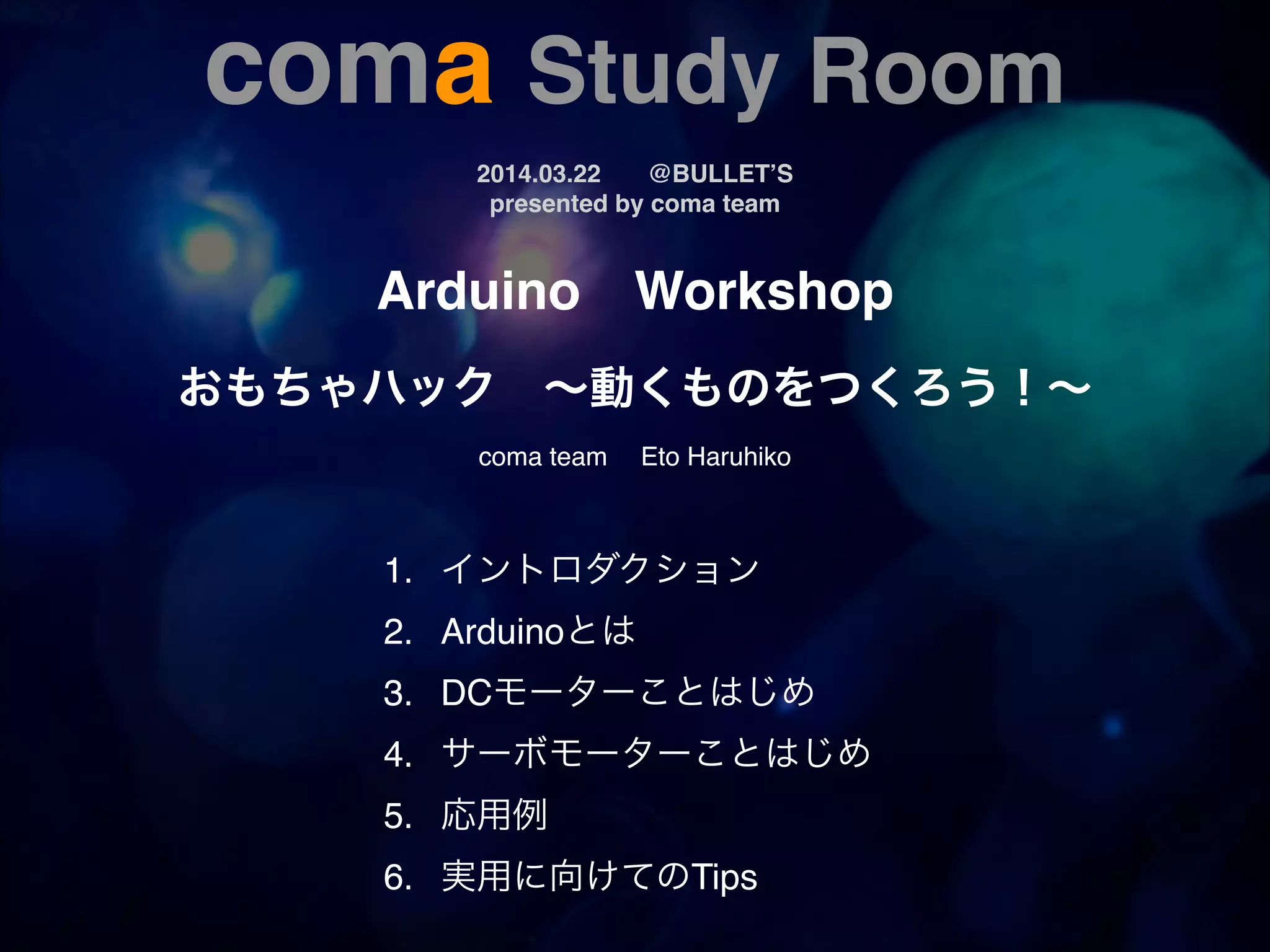
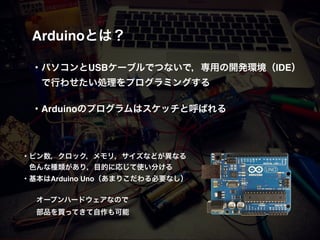
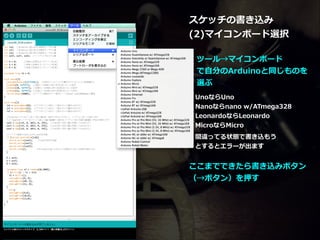
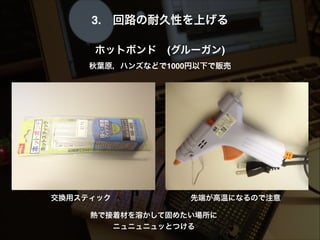
・DCモーターでやったことと基本的に一緒です
import
processing.serial.*;
//シリアル通信ライブラリのインポート
Serial
myPort;
//オブジェクト変数の宣言
int
ArduinoPortNum
=
5;
//コンソールに表示されたポート番号に設
定
int
degree;
//角度の変数
void
setup(){
frameRate(30);
//画面のフレームレートを30fpsに
size(220,
300);
//画面サイズの設定
println(Serial.list());
//コンソールにポート一覧を表示
//ポート番号ArduinoPortNumを9600bpsでオープンする
myPort
=
new
Serial(this,
Serial.list()[ArduinoPortNum],
9600);
}
void
draw(){
background(100,250,250);
stroke(255);
line(0,235,250,235);
fill(0,110,220);
textAlign(CENTER,
CENTER);
text("degree",width/2,80);
//マウス座標をサーボの回転角度に使う
if(20<=mouseX
&&
mouseX<=200){
degree
=
mouseX-‐20;
ellipse(mouseX,235,10,10);
text(degree,width/2,100);
}
if(20>mouseX){
degree
=
0;
ellipse(20,235,10,10);
text(degree,width/2,100);
}
if(200<mouseX){
degree
=
180;
ellipse(200,235,10,10);
text(degree,width/2,100);
}
myPort.write(degree);
//回転角度degreeを送信
}
Arduino
servo_̲3.ino
シリアルで受信した値を回転⾓角度度に使うスケッチ
Processing
servoController.pde
マウス座標を0〜~180の範囲でArduinoに送信
マウスを動かすと
サーボの⾓角度度が変わります](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-30-320.jpg)

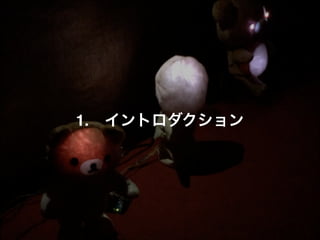
![①距離センサとの連携
居眠り防⽌止ピコピコハンマーのスケッチと回路路/*距離センサはシャープ測距モジュールGP2Y0A21YKを使用*/
#include
<Servo.h>
//サーボライブラリのインポート
Servo
servo0;
//インスタンスservo0を作成
int
sensorPin
=
0;
//アナログ0番ピン(A0)を距離センサと接続
int
sensorValue
=
0;
//センサの読み取り値を入れる変数
int
tempValue
=
0;
//センサの読み取り値を入れる変数
void
setup(){
Serial.begin(9600);
//シリアル通信を開始
servo0.attach(2);
//デジタル2番ピンにサーボをつなぐ
}
void
loop(){
sensorValue
=
analogRead(sensorPin);
//センサ値の読み取り
tempValue
=
sensorValue;
//tempValueに値を保管
/*距離が近過ぎたときセンサの値が発散することを無視*/
if
(sensorValue
<
70){
sensorValue
=
70;
}
else{
sensorValue
=
tempValue;
}
/*距離センサの読み取り値を距離[cm]に変換*/
int
range
=
(6787
/
(
sensorValue
-‐
3))
-‐
4;
/*シリアルモニタに変換後の距離[cm]と生データを表示*/
Serial.print(range);
Serial.print("
,
");
Serial.print(sensorValue);
Serial.print("na");
/*対象物とセンサとの距離が20cm以下のときサーボを動作*/
if
(range
<
20){
servo0.write(110);
delay(500);
servo0.write(10);
delay(1500);
servo0.write(110);
delay(100);
}
else{
servo0.write(90);
}
}
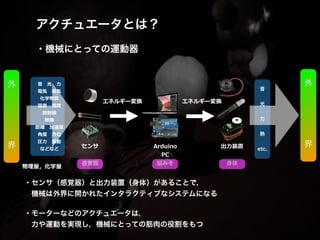
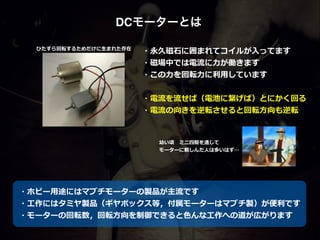
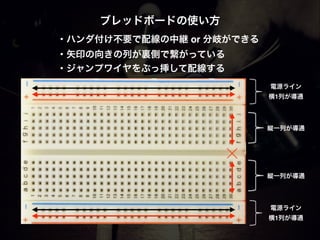
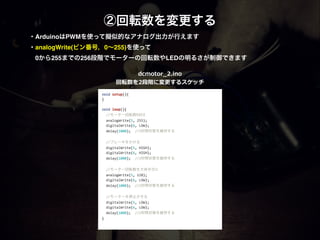
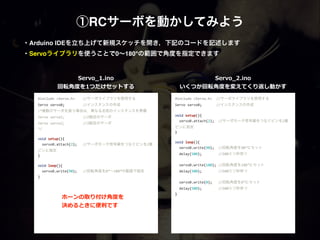
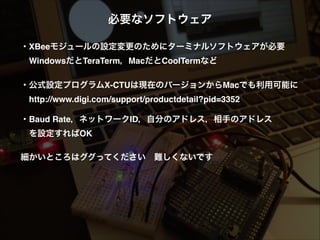
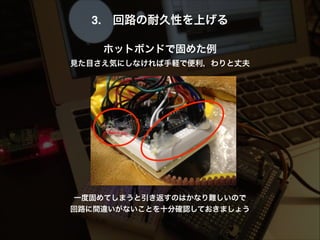
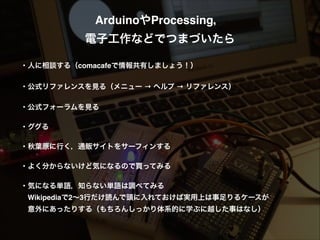
距離離センサ:シャープ測距モジュールGPY0A21YK
さきほど組んだRCサーボの回路路をそのまま使います
距離離センサはシャープ測距モジュールGPY0A21YK(1個400円)を使⽤用
⽩白:センサ出⼒力力
⾚赤:グランド
!
⿊黒:Vcc(5V)
写真のように,
邪悪な配線⾊色仕様になっているので
配線時には間違えないよう
ご注意ください](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-33-320.jpg)
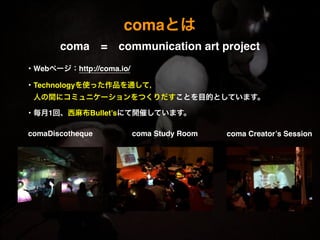
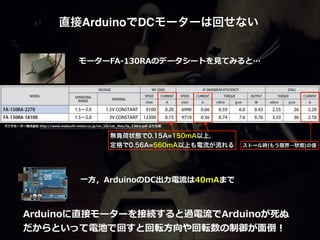
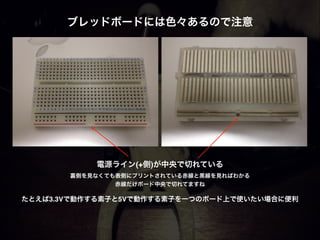
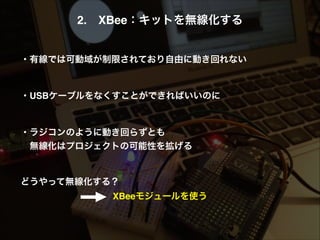
![③ちょっとだけ複雑な制御
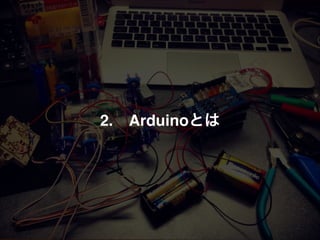
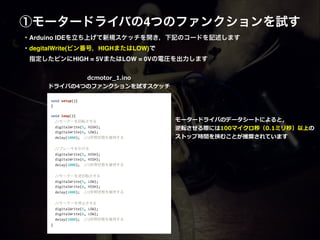
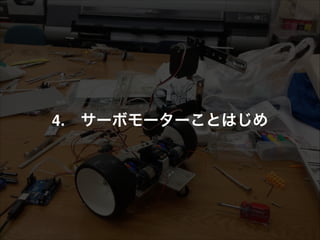
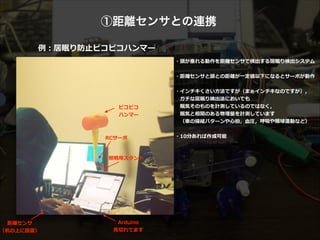
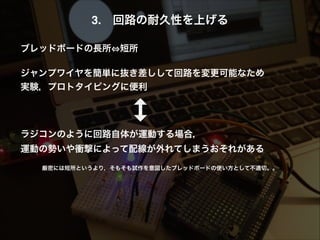
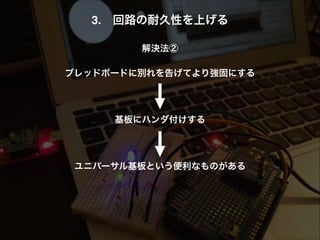
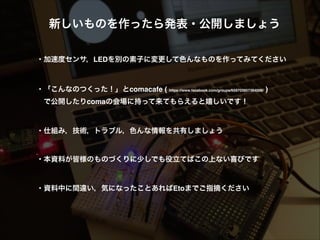
例例:対象を追尾するロボットアーム
・ProcessingのサンプルReach 2 http://www.processing.org/examples/reach2.html
・先端がマウス座標を追いかける多関節モデル
!
!
!
!
!
!
!
!
!
!
中⾝身を以下のように改造:
・実際のRCサーボの個数と関節数を⼀一致させて
隣隣り合うサーボ間の相対的な⾓角度度[°]を取得し,
シリアルでArduinoへ送信
!
・カメラで認識識した対象を追わせたり,
KinectやLeapと連携させてアバターロボットを作ることが可能
(⾃自分が⼿手を振ると⼿手を振りかえすロボットなど)
!
・Processingには他にもメカを作る上で便便利利なサンプルがたくさんあります
RCサーボとアイスの棒で制作した例例](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-35-320.jpg)

This slide explains how to control motors by Arduino and Processing. You can see one of the applications of motor control in this vid: youtu.be/0nw3DtXrLLI (Raspberry Pi is used here instead of Arduino) coma Study Room vol.2 3.22(Sat) 18:00-22:30@Bullet’s http://coma.io/coma-study-room-vol-2/

































































