Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Teng Tokoro
62,072 views
小さくて賢いロボット『マイクロマウス』を作ろう!
Presentation at #rogysemi07.
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 6
2
/ 6
Most read
3
/ 6
4
/ 6
5
/ 6
6
/ 6
Most read
More Related Content
PDF
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
PDF
これまでの制作物いろいろ+ Quadruptor
by
Teng Tokoro
PDF
VTC on Unity の 進捗について
by
Ryodo Tanaka
PDF
Virtual Tsukuba Challenge on Unity について
by
Ryodo Tanaka
PPTX
Radial Menu on ROS1 @ ROS Japan UG #38
by
yoshito-okada
PDF
小ネタ:Android上でroscoreを走らせてみた
by
Ryodo Tanaka
PDF
Fuji-SAKURA MTG発表資料
by
三七男 山本
PDF
GR-KURUMIでミニ四駆をラジコン化
by
Bizan Nishimura
超小型クアッドロータ "Quadruptor" の製作とその制御
by
Teng Tokoro
これまでの制作物いろいろ+ Quadruptor
by
Teng Tokoro
VTC on Unity の 進捗について
by
Ryodo Tanaka
Virtual Tsukuba Challenge on Unity について
by
Ryodo Tanaka
Radial Menu on ROS1 @ ROS Japan UG #38
by
yoshito-okada
小ネタ:Android上でroscoreを走らせてみた
by
Ryodo Tanaka
Fuji-SAKURA MTG発表資料
by
三七男 山本
GR-KURUMIでミニ四駆をラジコン化
by
Bizan Nishimura
Viewers also liked
PDF
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
PDF
Beamertemplete
by
Tasuku Soma
PDF
高分子の分子運動
by
Hiroaki Kikuchi
PPTX
情報統計力学のすすめ
by
Naoki Hayashi
PPTX
パズルゲーム用ステージの自動生成
by
yskcon
PPTX
Rogyゼミスライド6th
by
Naoki Hayashi
PPTX
Rogyzemi
by
Naoki Hayashi
PDF
Rogy目覚まし(仮)+おまけ
by
Naoki Hayashi
PDF
151025kawarobo susume 02
by
武帝 太祖
PPTX
技名の考え方
by
Mahato Endo
PPTX
Rogyzemi temp
by
akatetsu
PPTX
ぼくのつくったこうだいさいてんじぶつ
by
Naoki Hayashi
PPT
Rogyゼミ2014 10
by
Naoki Hayashi
PDF
151025kawarobo susume 04
by
武帝 太祖
PPTX
2014年の制作物報告
by
uu ymd
PPTX
ドキ♡ドキ †テクスチャ† 講習会
by
Linea319
PPTX
Rogyゼミ7thスライドpublic
by
Naoki Hayashi
PDF
Ensemble Kalman Filterを用いたカオス力学系の推定
by
Fumiya Watanabe
PDF
151025kawarobo susume 01
by
武帝 太祖
PDF
151025kawarobo susume 03
by
武帝 太祖
グローバル理工人材のための今日から使える検索テクニック ―もう日本語でググるのはやめよう
by
Teng Tokoro
Beamertemplete
by
Tasuku Soma
高分子の分子運動
by
Hiroaki Kikuchi
情報統計力学のすすめ
by
Naoki Hayashi
パズルゲーム用ステージの自動生成
by
yskcon
Rogyゼミスライド6th
by
Naoki Hayashi
Rogyzemi
by
Naoki Hayashi
Rogy目覚まし(仮)+おまけ
by
Naoki Hayashi
151025kawarobo susume 02
by
武帝 太祖
技名の考え方
by
Mahato Endo
Rogyzemi temp
by
akatetsu
ぼくのつくったこうだいさいてんじぶつ
by
Naoki Hayashi
Rogyゼミ2014 10
by
Naoki Hayashi
151025kawarobo susume 04
by
武帝 太祖
2014年の制作物報告
by
uu ymd
ドキ♡ドキ †テクスチャ† 講習会
by
Linea319
Rogyゼミ7thスライドpublic
by
Naoki Hayashi
Ensemble Kalman Filterを用いたカオス力学系の推定
by
Fumiya Watanabe
151025kawarobo susume 01
by
武帝 太祖
151025kawarobo susume 03
by
武帝 太祖
小さくて賢いロボット『マイクロマウス』を作ろう!
1.
小さくて賢いロボット 『マイクロマウス』を作ろう! 機械制御システム専攻 M1 10g @tokoro10g May
9th, 2015 @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 1 /5
2.
自己紹介 @tokoro10g (闇を切り裂く非線形システム少女ところたん) • 東京工業大学大学院
理工学研究科 機械制御システム専攻 M1 • すき : ◦ 制御理論 ◦ プログラミング (組み込みC++(11)メイン, いろいろ書きます) ◦ Arch Linux, i3-wm, Vim, STM32 ◦ 非線形システム (カオスは嫌よ) ◦ 賢くて小さなもの • ギャラリー @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 2 /5
3.
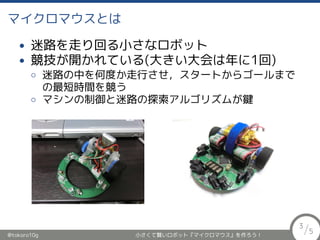
マイクロマウスとは • 迷路を走り回る小さなロボット • 競技が開かれている(大きい大会は年に1回) ◦
迷路の中を何度か走行させ,スタートからゴールまで の最短時間を競う ◦ マシンの制御と迷路の探索アルゴリズムが鍵 @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 3 /5
4.
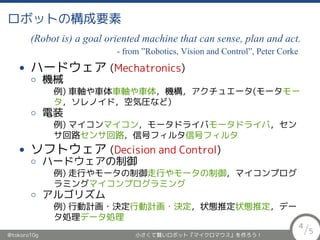
ロボットの構成要素 (Robot is) a
goal oriented machine that can sense, plan and act. - from ”Robotics, Vision and Control”, Peter Corke • ハードウェア (Mechatronics) ◦ 機械 例) 車軸や車体,機構,アクチュエータ(モータ,ソレノイド, 空気圧など) ◦ 電装 例) マイコン,モータドライバ,センサ回路,信号フィルタ • ソフトウェア (Decision and Control) ◦ ハードウェアの制御 例) 走行やモータの制御,マイコンプログラミング ◦ アルゴリズム 例) 行動計画・決定,状態推定,データ処理 @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 4 /5
5.
どんな人におすすめ? • 部品選定から競技まで,設計・加工から制御・ プログラミングまでを幅広く経験したい人 • 競技を通して自信をつけたり実績を残したい人 •
「機械加工は難しそう…」だけどロボットは作 りたい人 (機体がシンプルなので) • 自主的に活動できる人 (何を作るにしても重要!) ◦ 分からないことは調べる・質問する ◦ 失敗をおそれずチャレンジする (安全には気をつけて) @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 5 /5
6.
Q&A Q1. 1台あたり何円ぐらいかかる? A1. 5,000円〜40,000円
ぐらい (だいたいモータが高い) Q2. 開発期間は? A2. 半年〜2年 ぐらい Q3. 活動時期は? A3. 例年3,4月〜12月 Q4. チーム開発なの? A4. 基本的に個人プレイです Q5. 完成できるか不安 A5. やる気次第…? 2人以上で1台を作るのも可 @tokoro10g 小さくて賢いロボット『マイクロマウス』を作ろう! 6 /5
Download