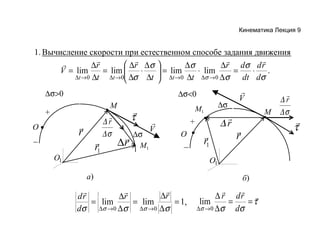
Документ представляет лекцию по кинематики, охватывающую вычисление скорости и ускорения движущихся точек с использованием векторных и координатных подходов. Он объясняет основные понятия, такие как алгебраическая скорость и модуль ускорения, а также вводит концепцию радиуса кривизны и естественных координатных осей. Лекция также включает формулу Серра-Френе для описания движений в пространстве.