![3. Невозмущенное движения
Общее решение для m a sin b sin 2
M
cos u L (16)
1 Ncn
t 0, k
где 1, 2 зависит от вида корней полинома f u 0
Угол собственного вращения [Серов В.М.]
R G R cos t cos
t
0
sin 2 t
dt f ab П t , n1 , k , П t , n2 , k , П n1 , k , П n2 , k
0
Ix
12](https://image.slidesharecdn.com/2012-120310045254-phpapp01/85/slide-12-320.jpg)











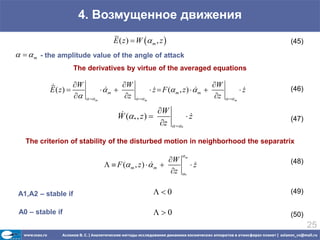
![4. Возмущенное движения
A0-stable; A1,A2 - unstable A0-unstable; A1,A2 - stable
A1,A2 – stable if
E ( z ) W* or f* 0 (42)
A0 – stable if
E ( z ) W* or f* 0 (43)
E - average value of the total energy, calculated in neighborhood separatrix
W* - value of the potential energy, calculated at the saddle point u=u*
f f (u , z ) 2(1 u 2 )[ E ( z ) W (u , z )] O( 2 ) (44)
* * * *
24](https://image.slidesharecdn.com/2012-120310045254-phpapp01/85/slide-24-320.jpg)







![6. Хаотические колебания КА с подвижным
центром масс
Гомоклинические траектории
4
cos ( j ) (t ) u0 , j 1, 2 (62)
2 (4 )C j exp(t ) C j exp( t )
2 1
Функция Мельникова
M (t0 , 0 ) { f1[qi ) (t )] g2[qi ) (t ), t t0 0 ]}dt M (i ) M (i )
(i )
( (
(63)
где M i ) (a sin i ) b sin 2 i ) ) sin(t t0 0 )dt ,
(i ) ( ( (
(64)
M (1 sin )( ) dt
(i ) 2 (i )
(i ) 2
Условие отсутствие хаоса
M(i ) M (i ) (65)
33](https://image.slidesharecdn.com/2012-120310045254-phpapp01/85/slide-33-320.jpg)










Документ представляет исследование динамики космических аппаратов в атмосфере планеты Венера, включая рассмотрение различных методов аналитической динамики. Основное внимание уделяется построению математических моделей движения космических аппаратов, анализу невозмущенных и возмущенных движений, а также определению устойчивости и резонанса в их динамике. В исследовании рассматриваются известные миссии на Венеру и их характеристики.