Downloaded 41 times

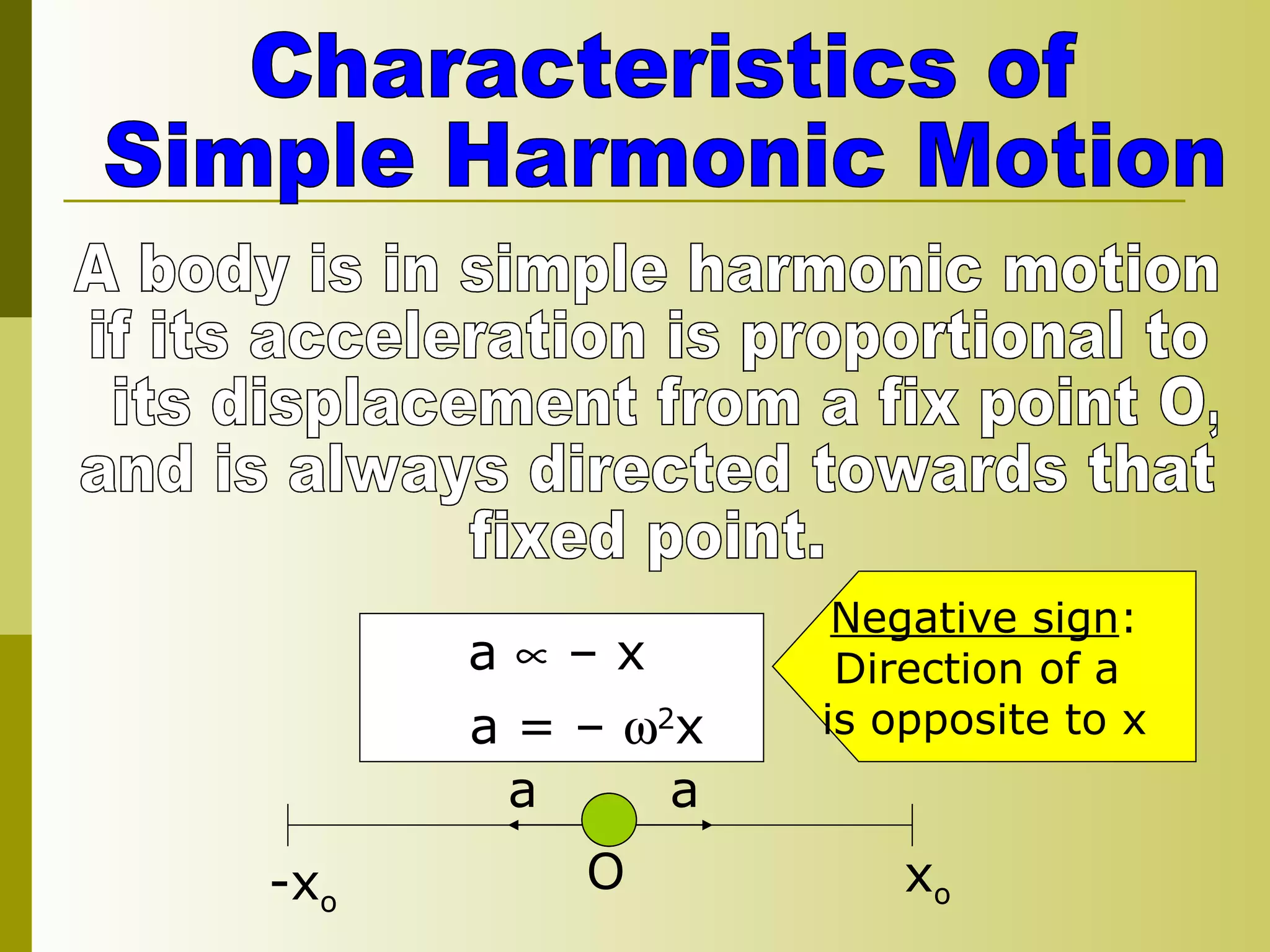
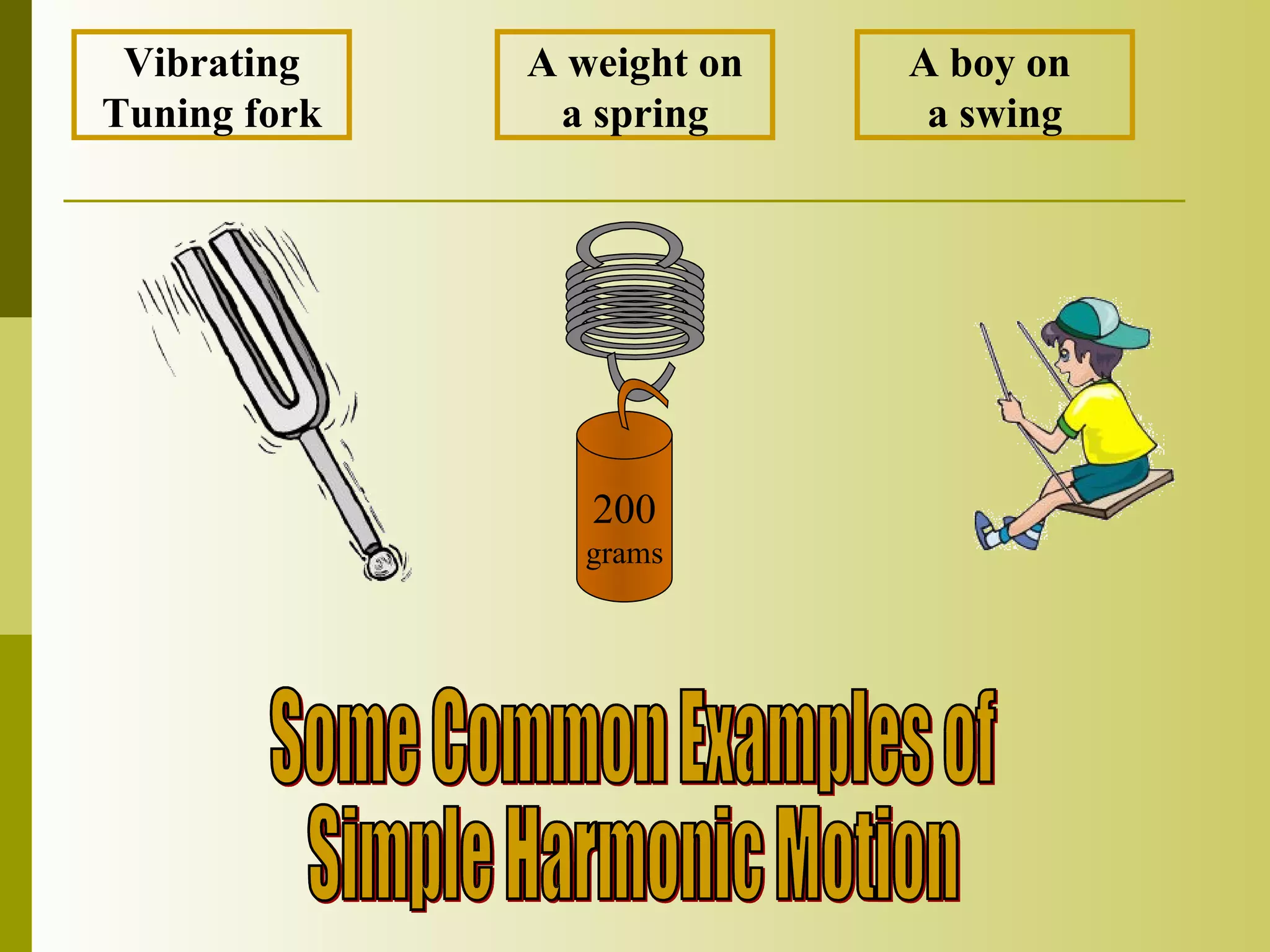
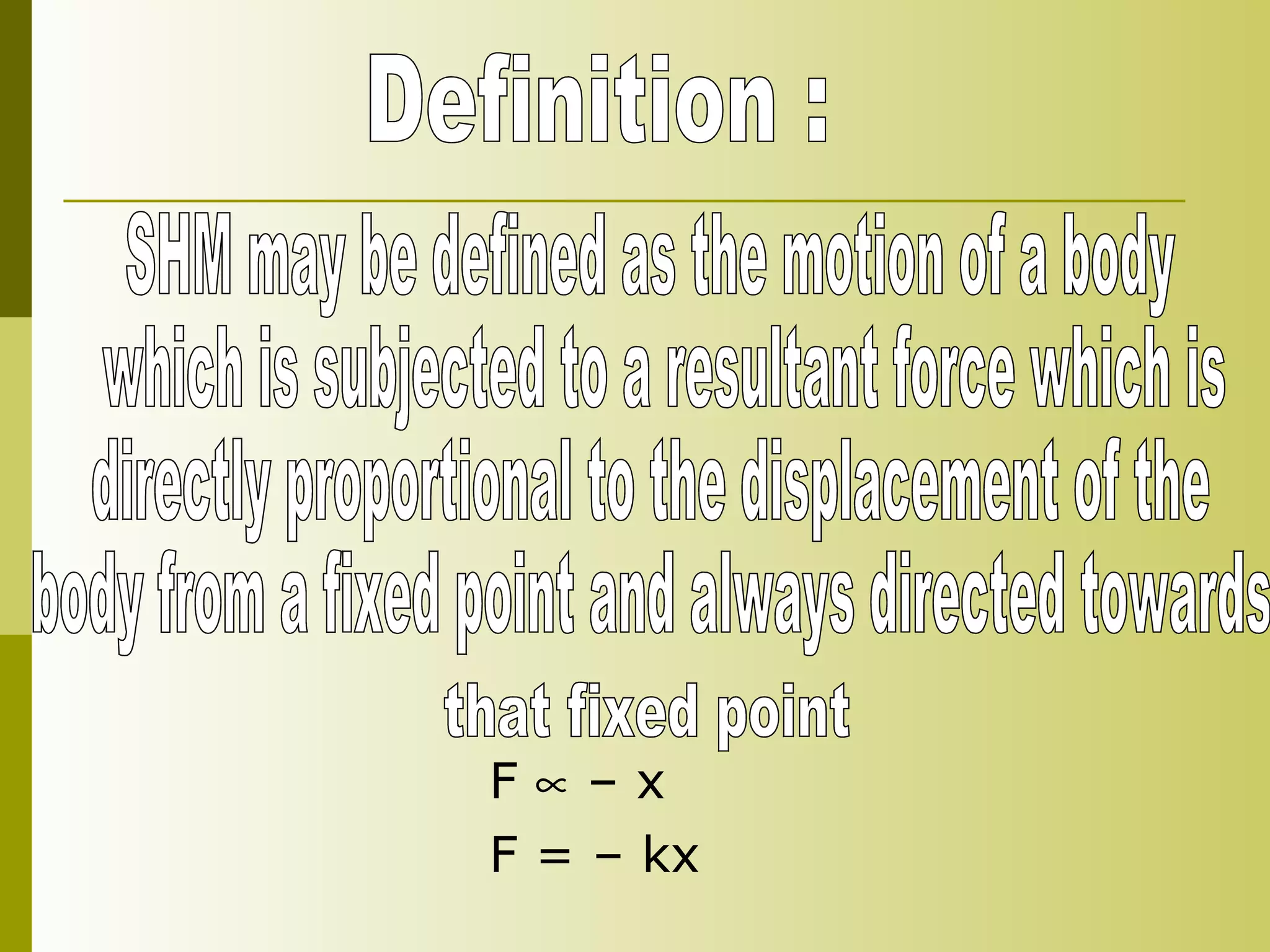
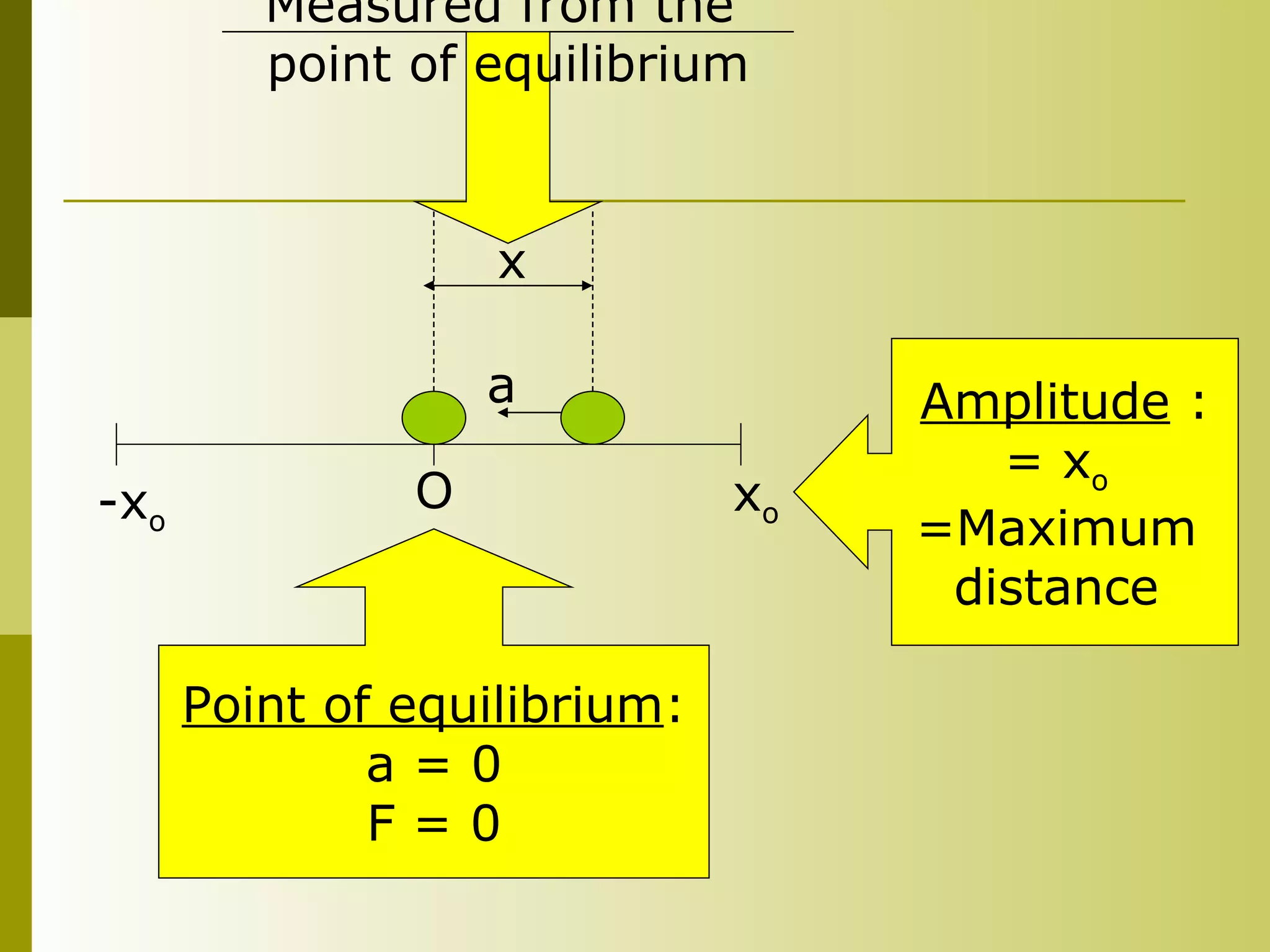
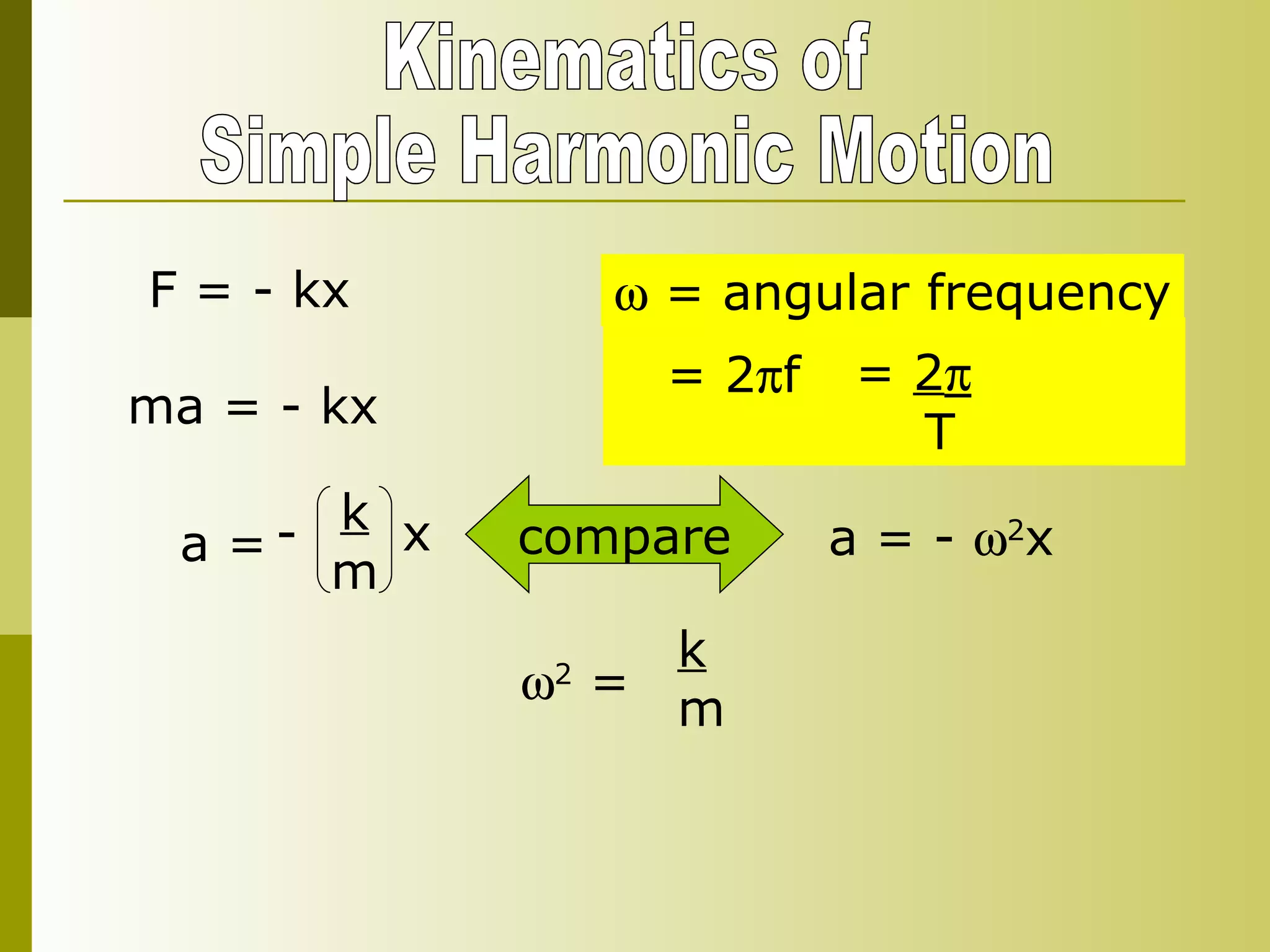
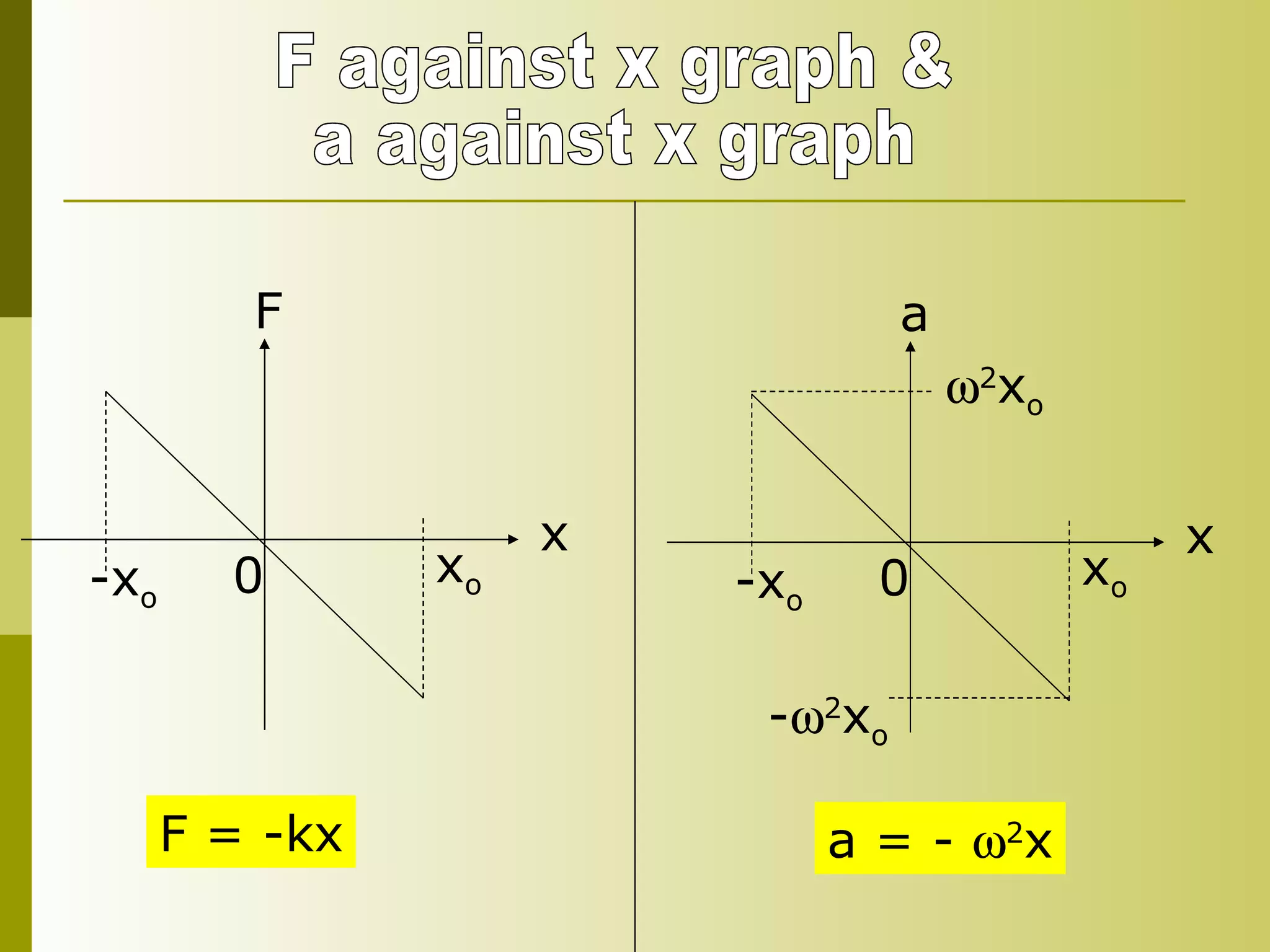
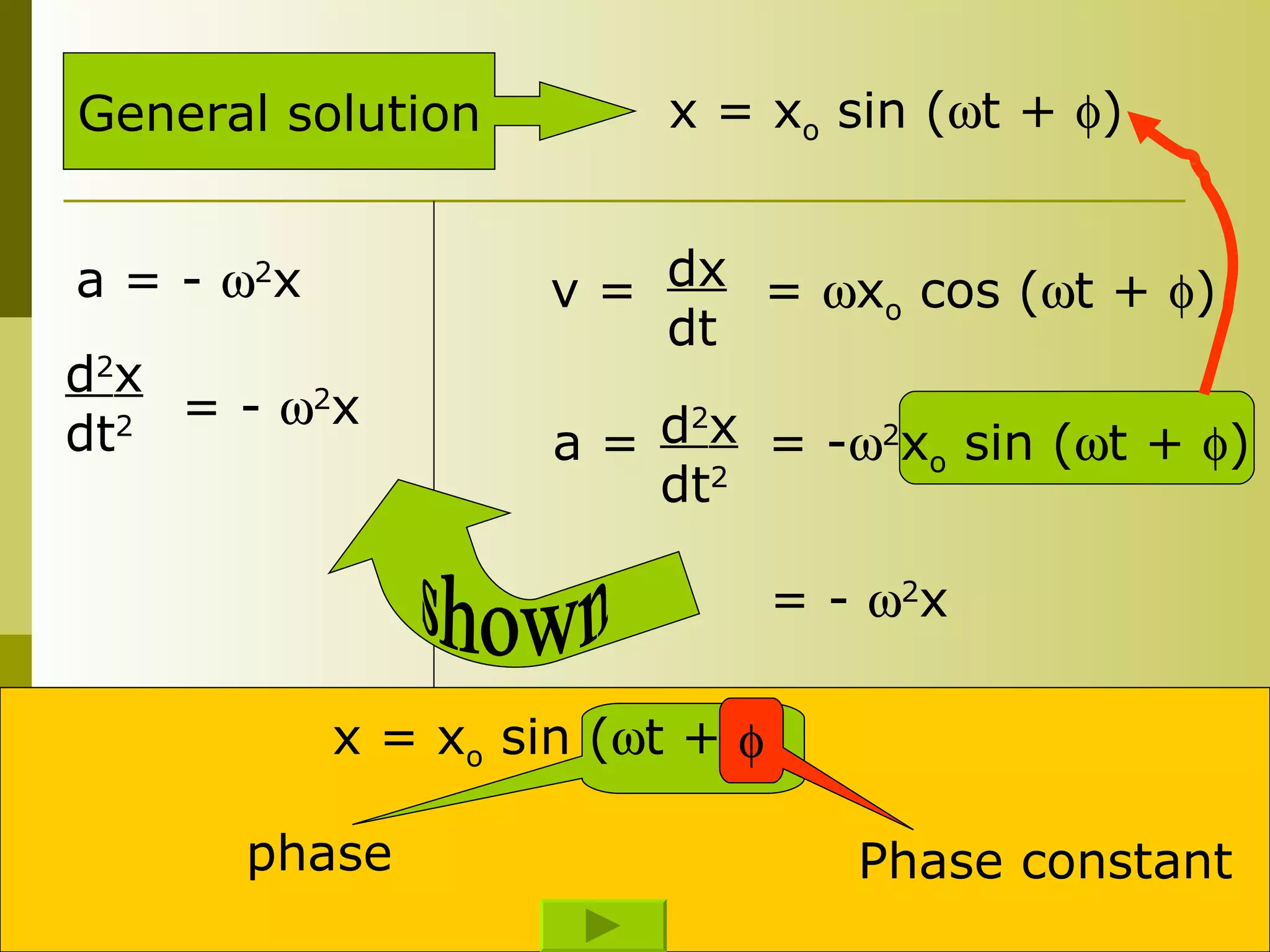
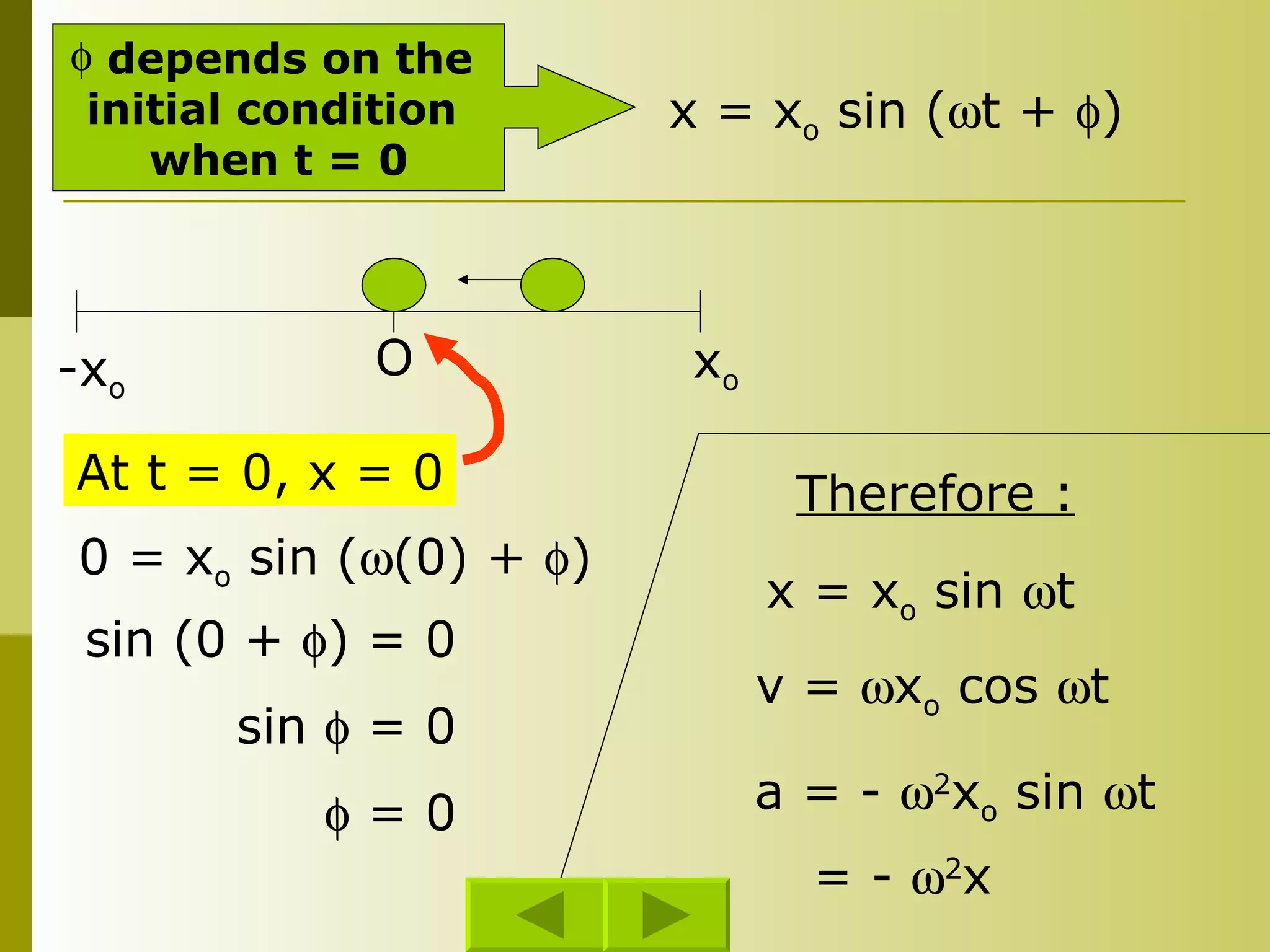
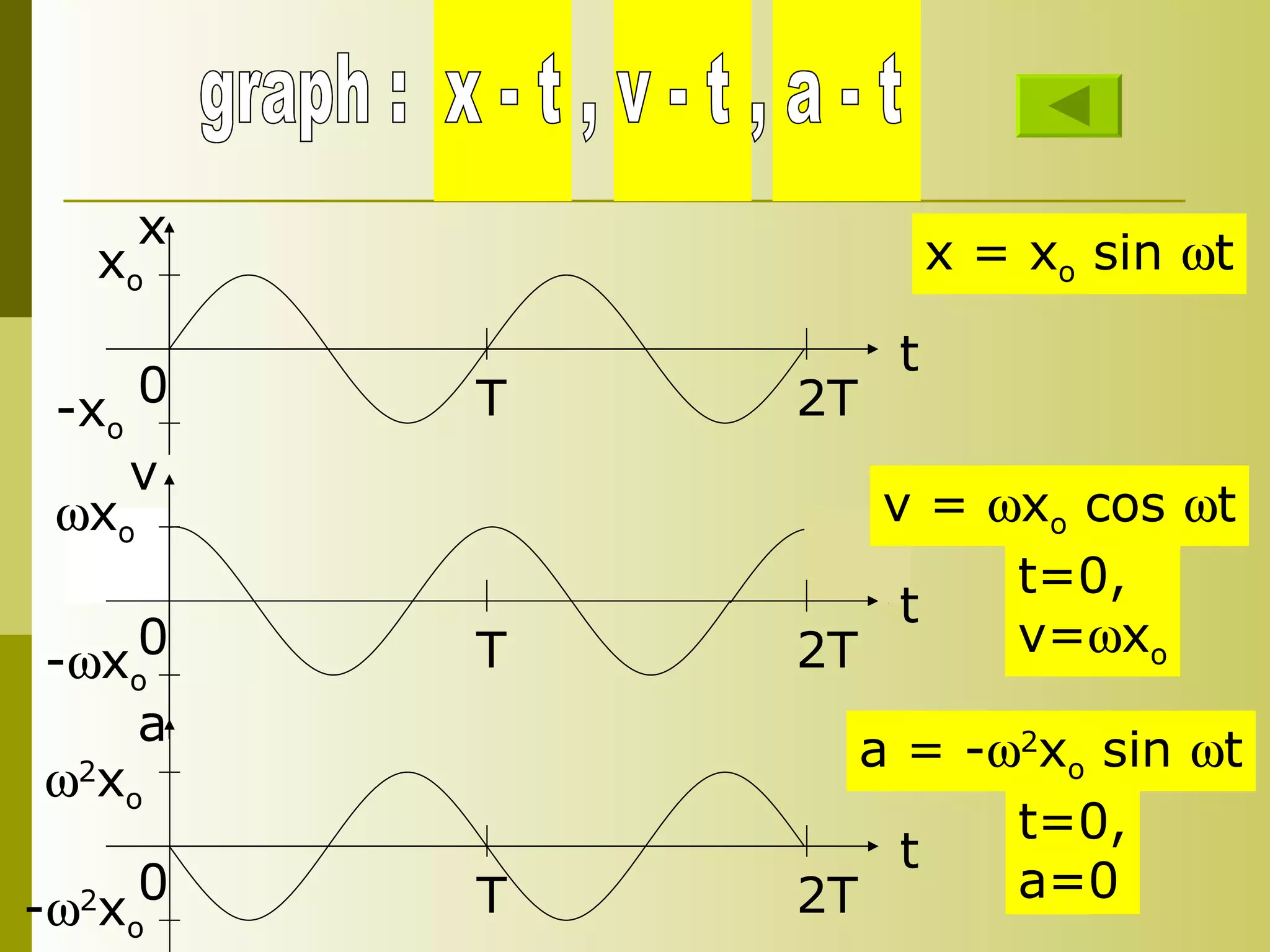
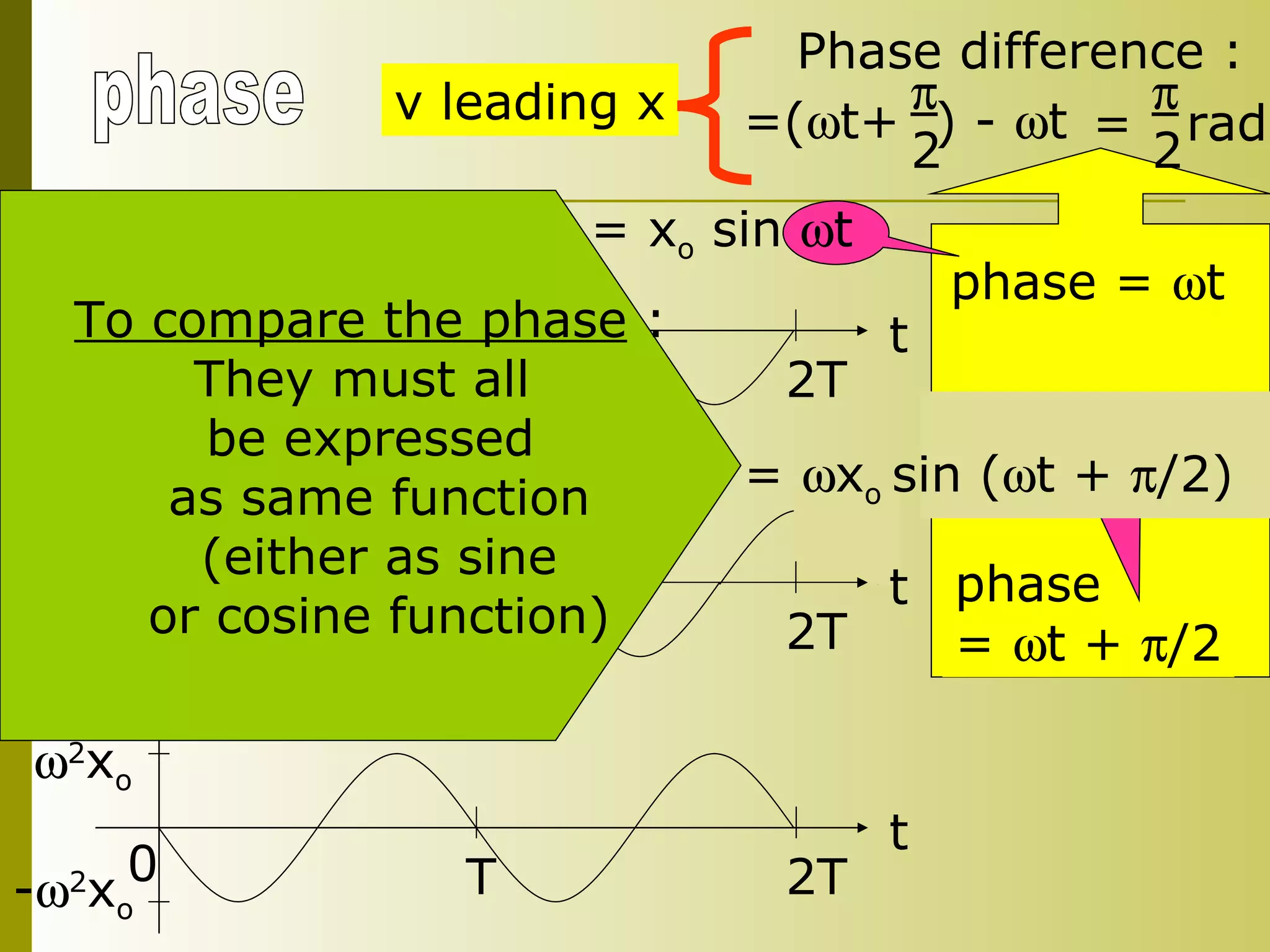
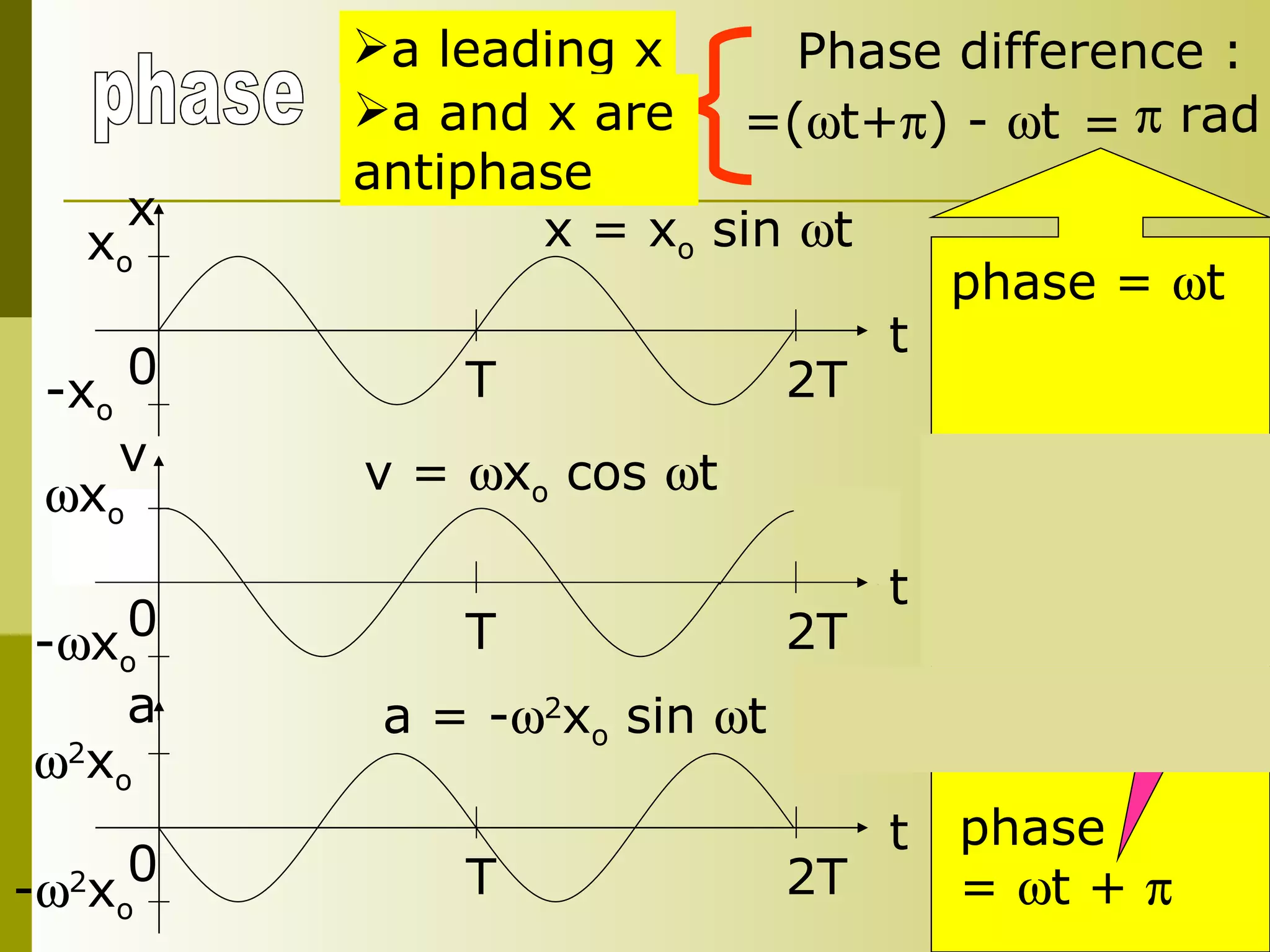
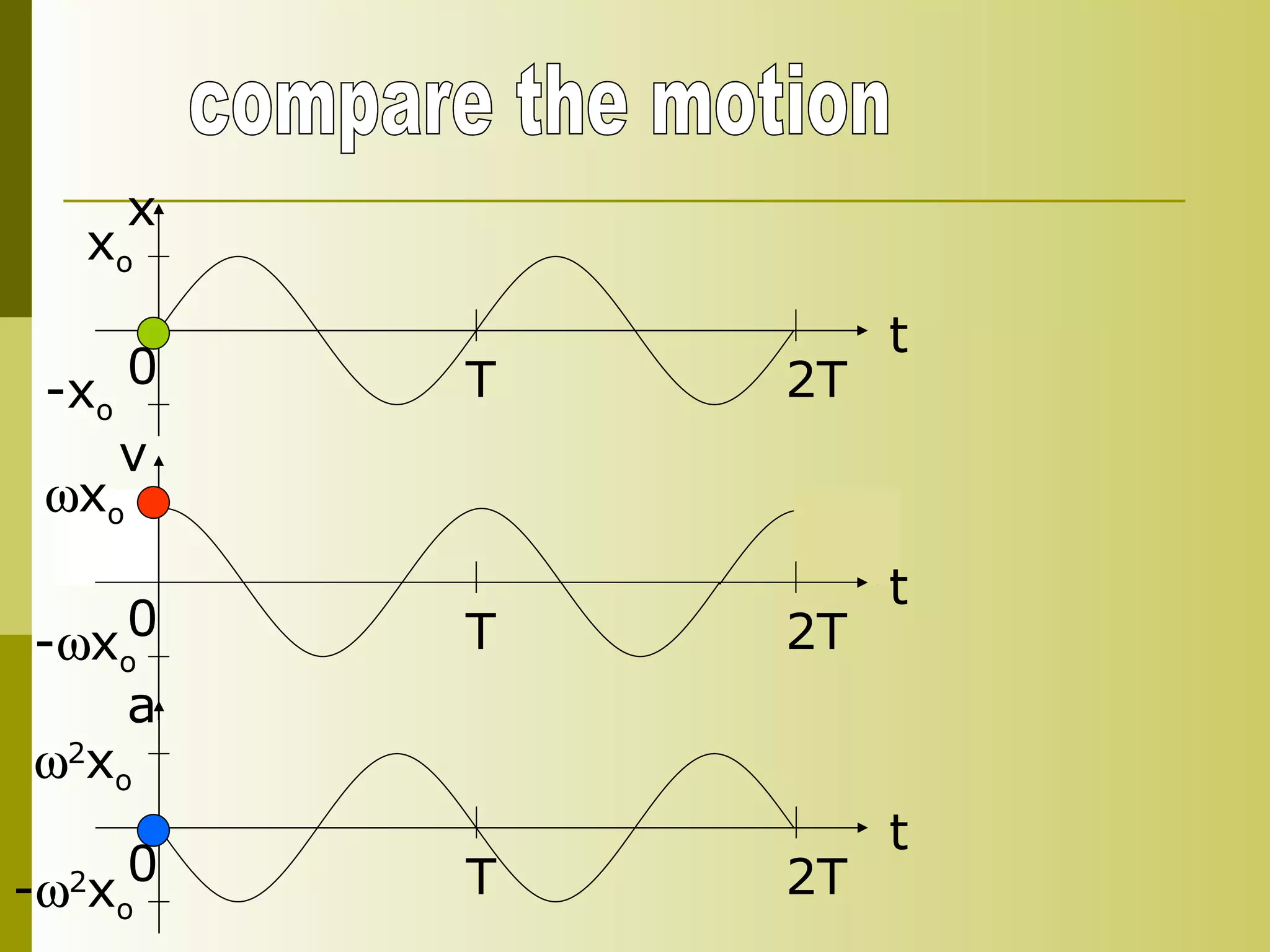
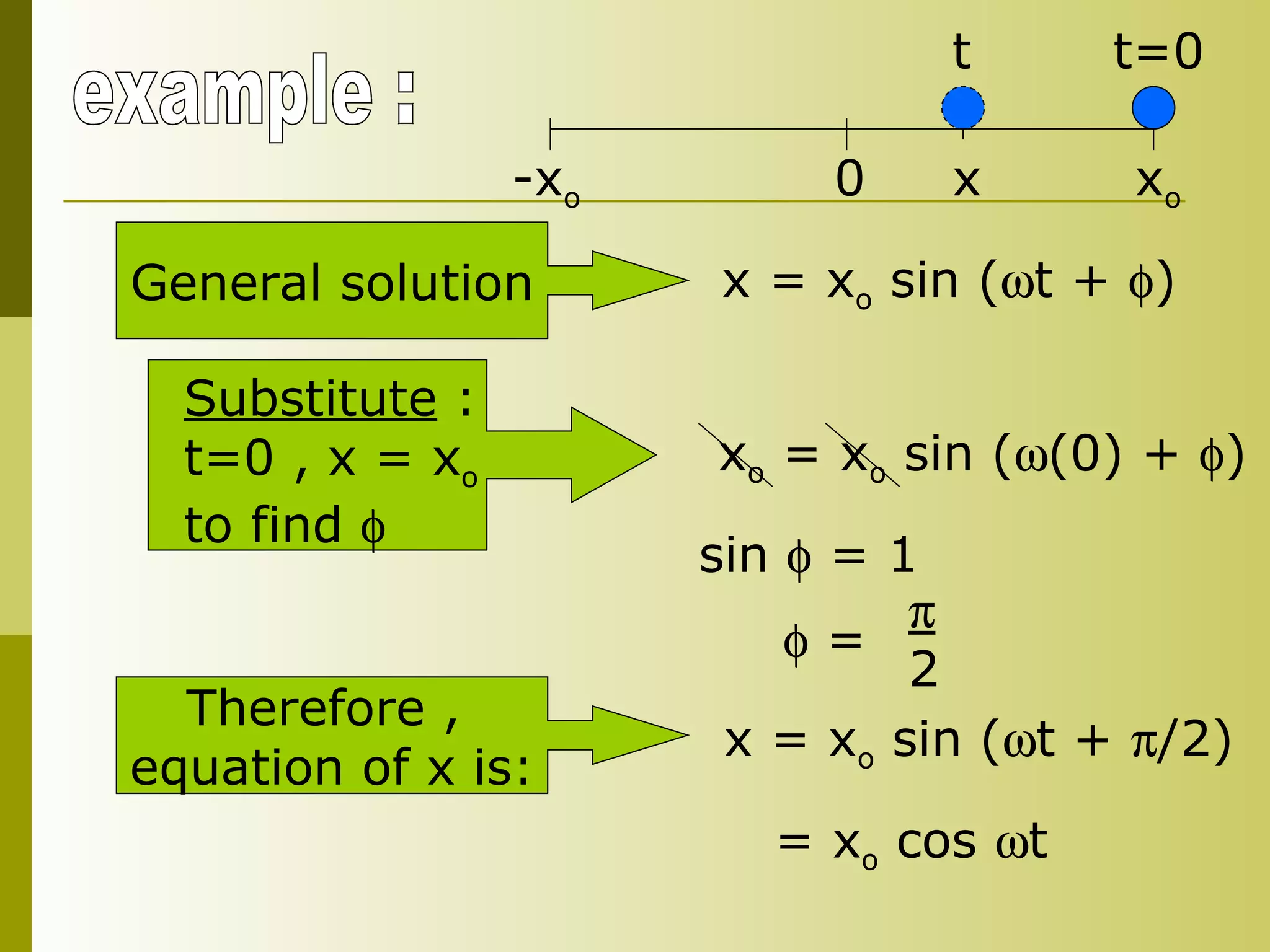
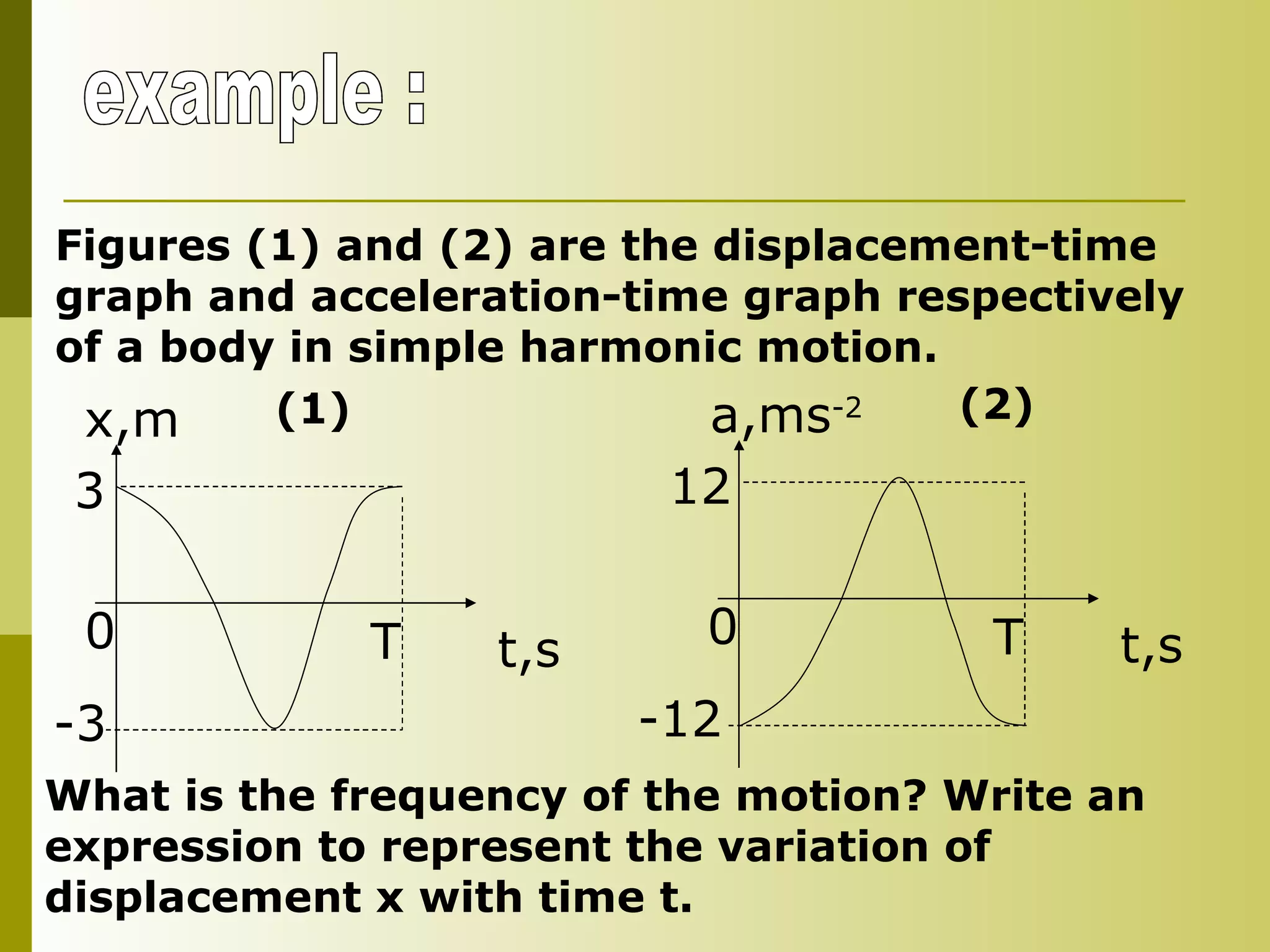
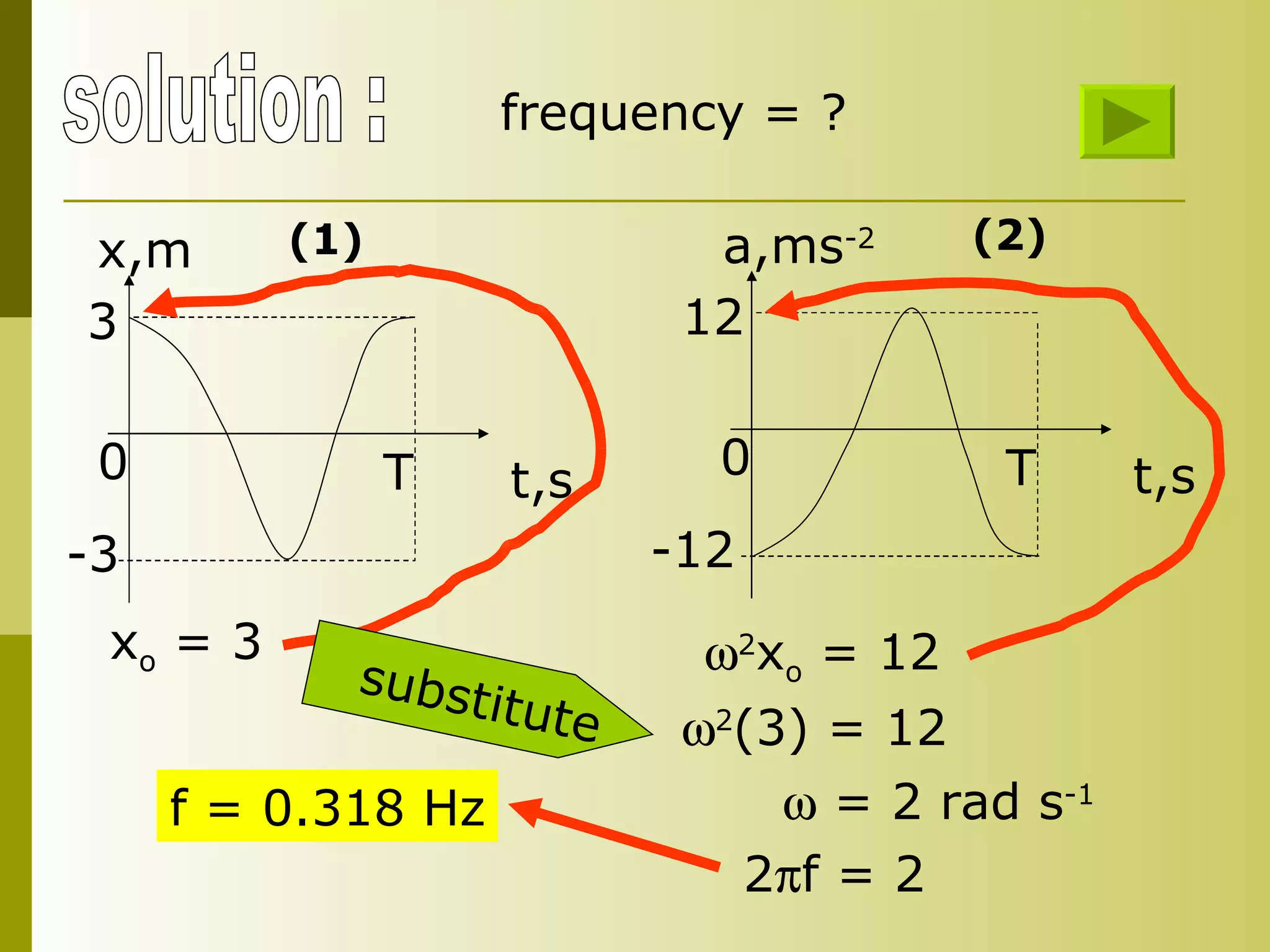
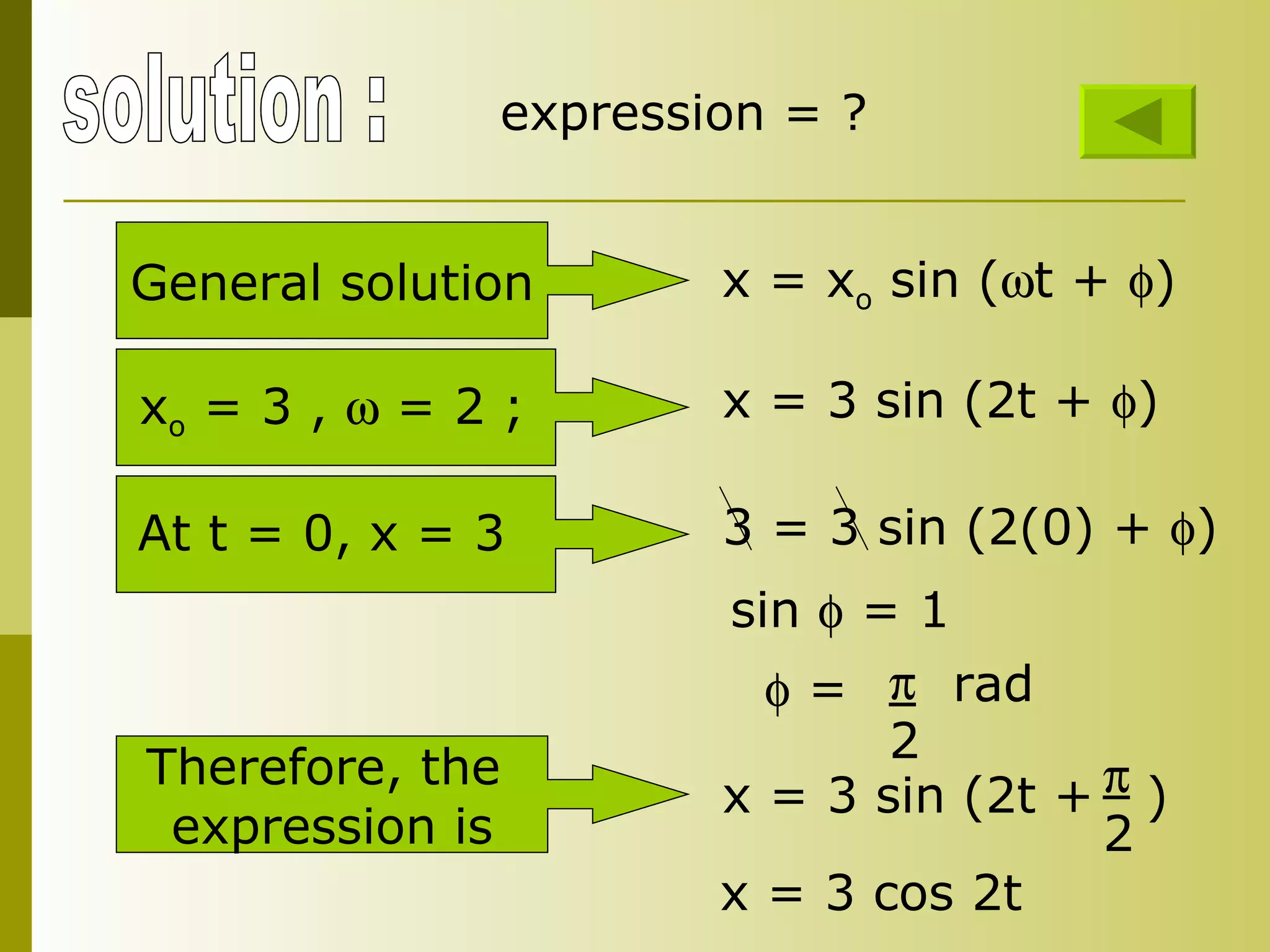
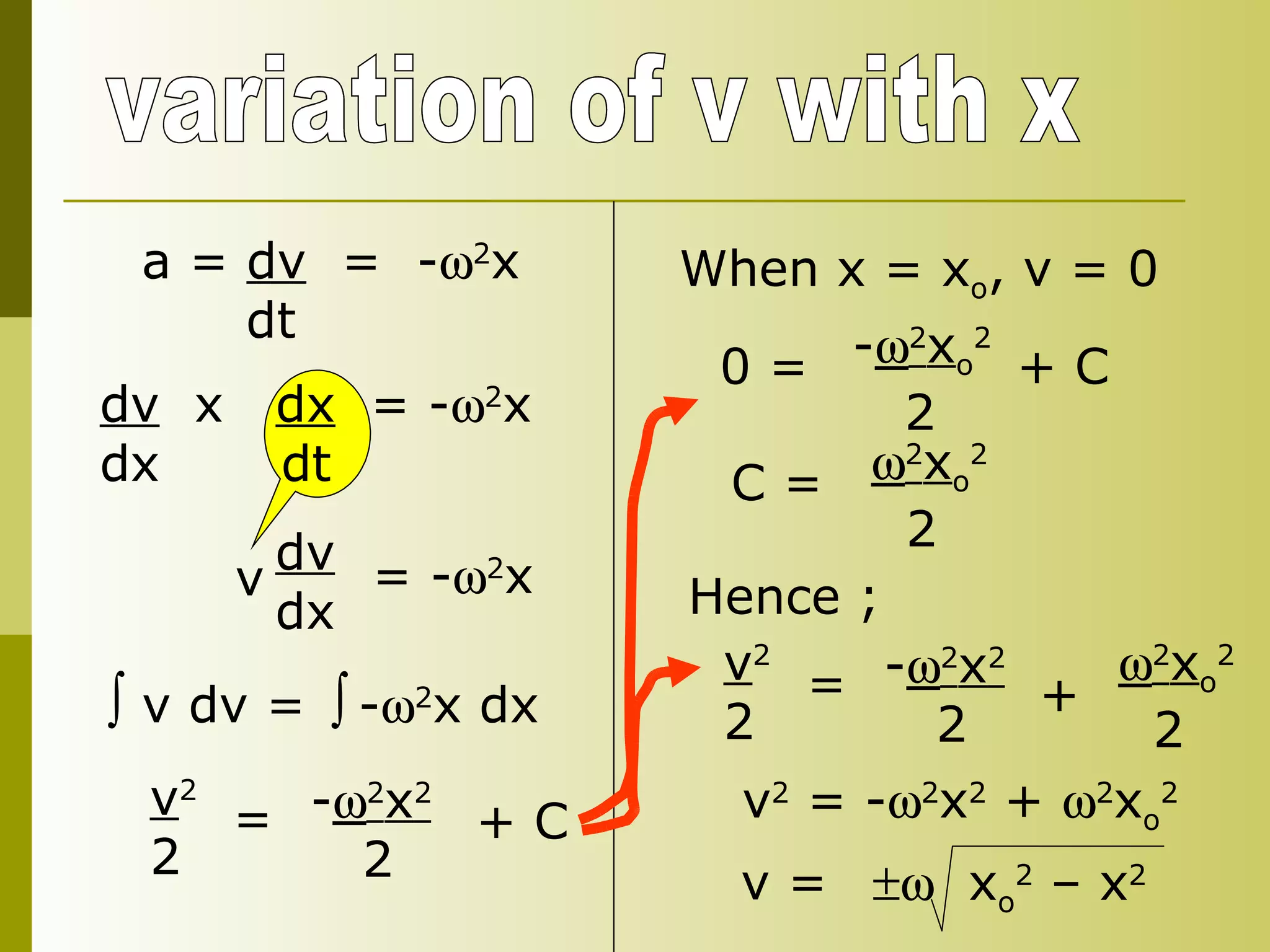
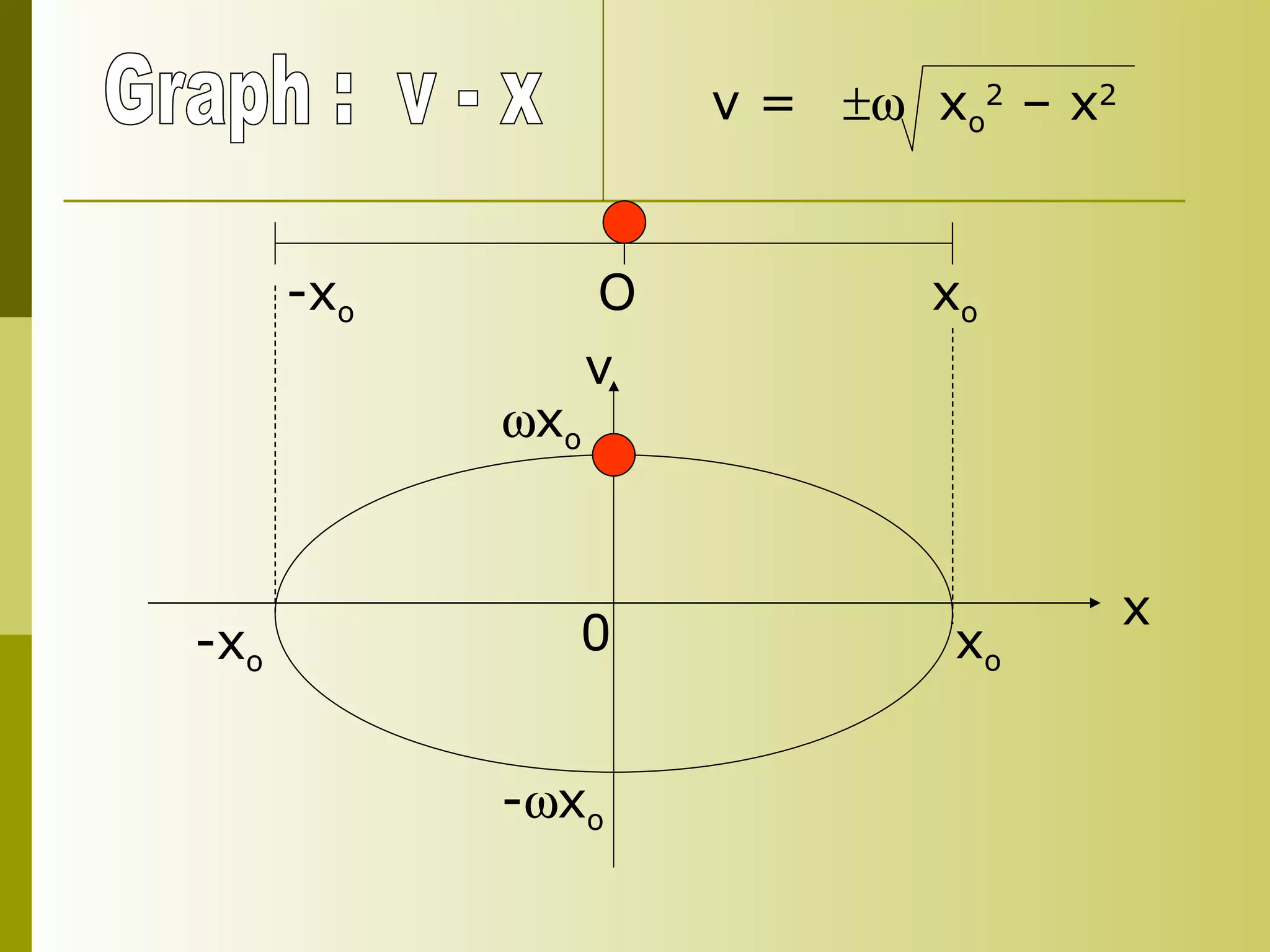
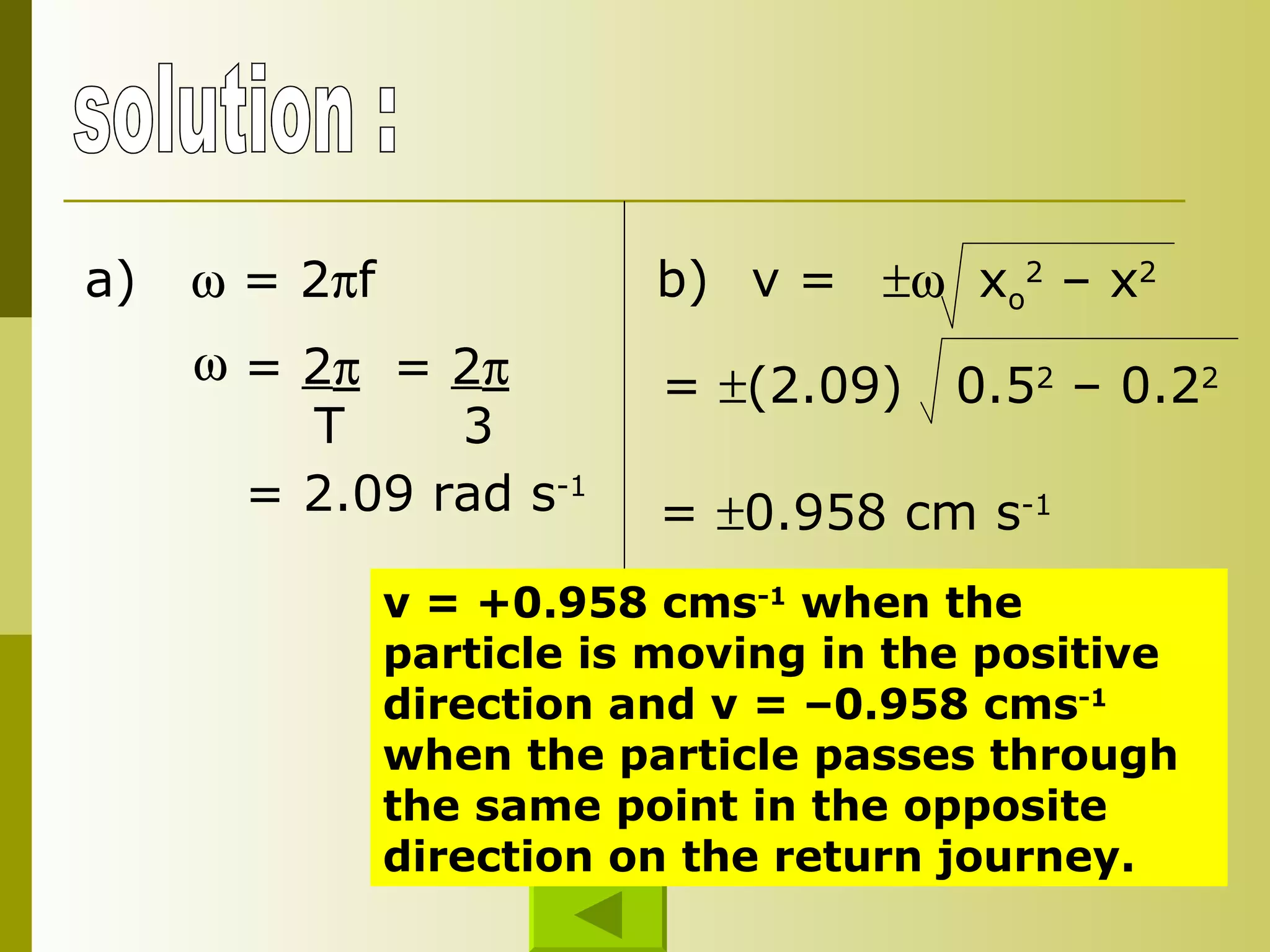
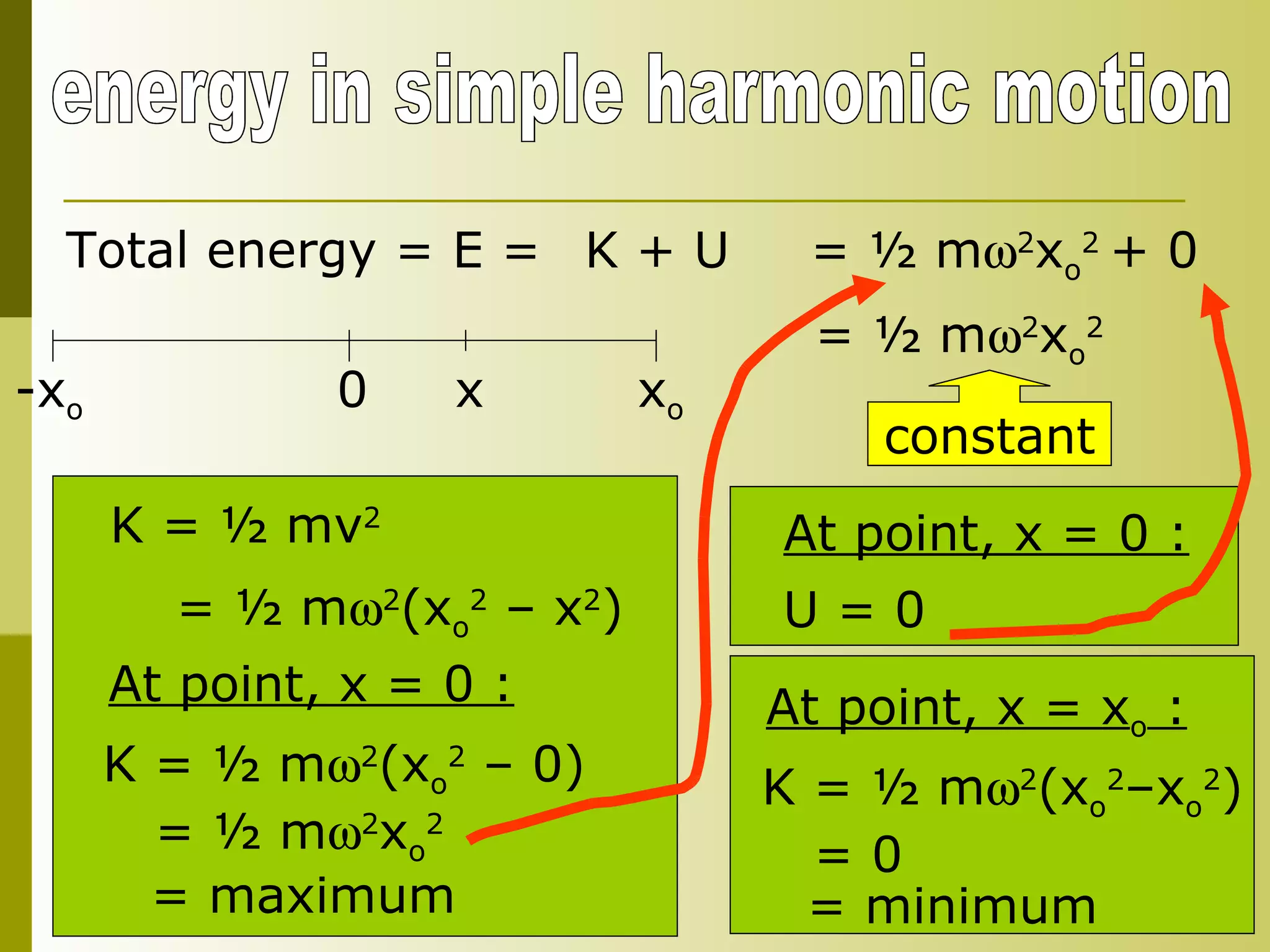
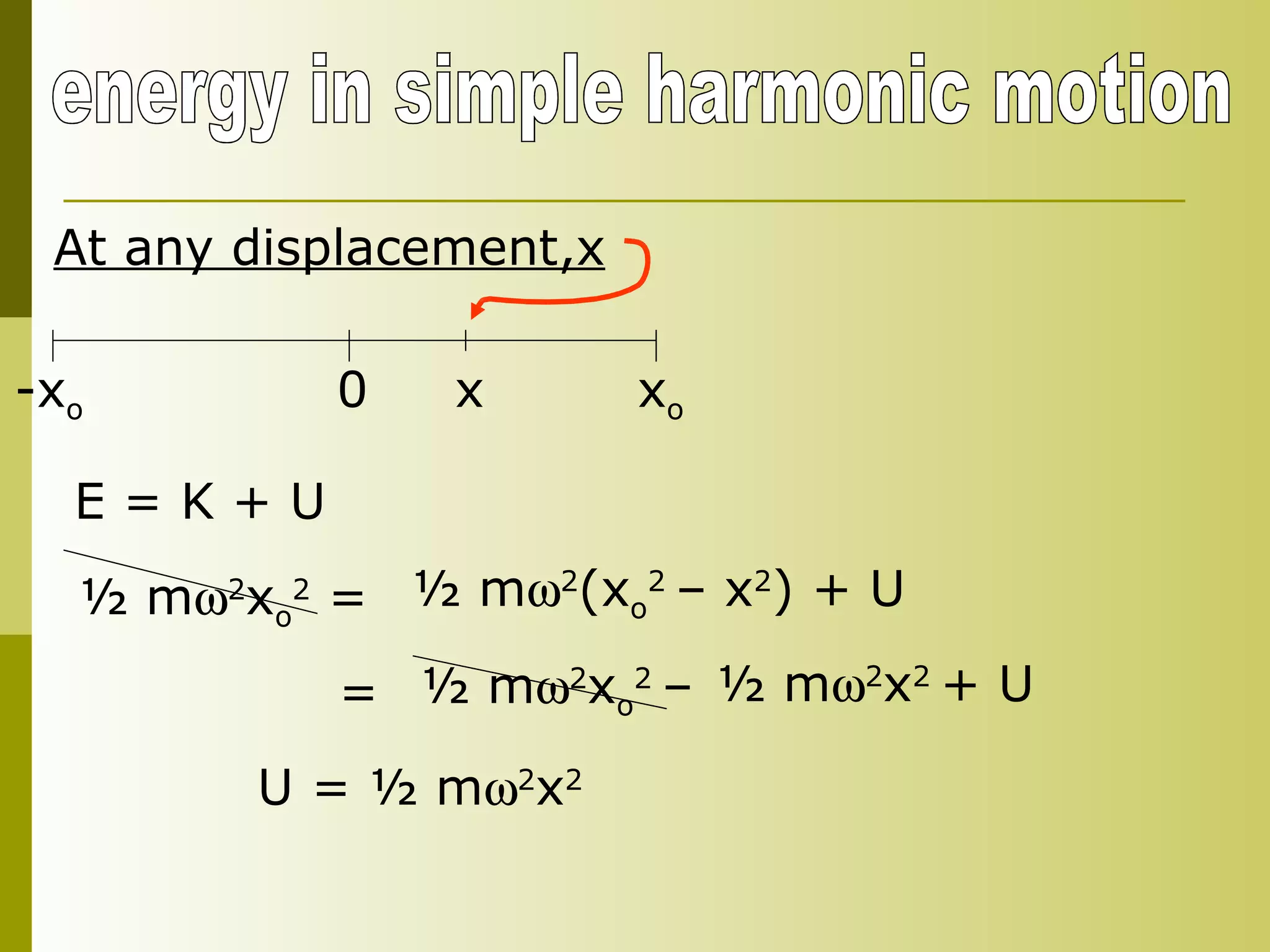
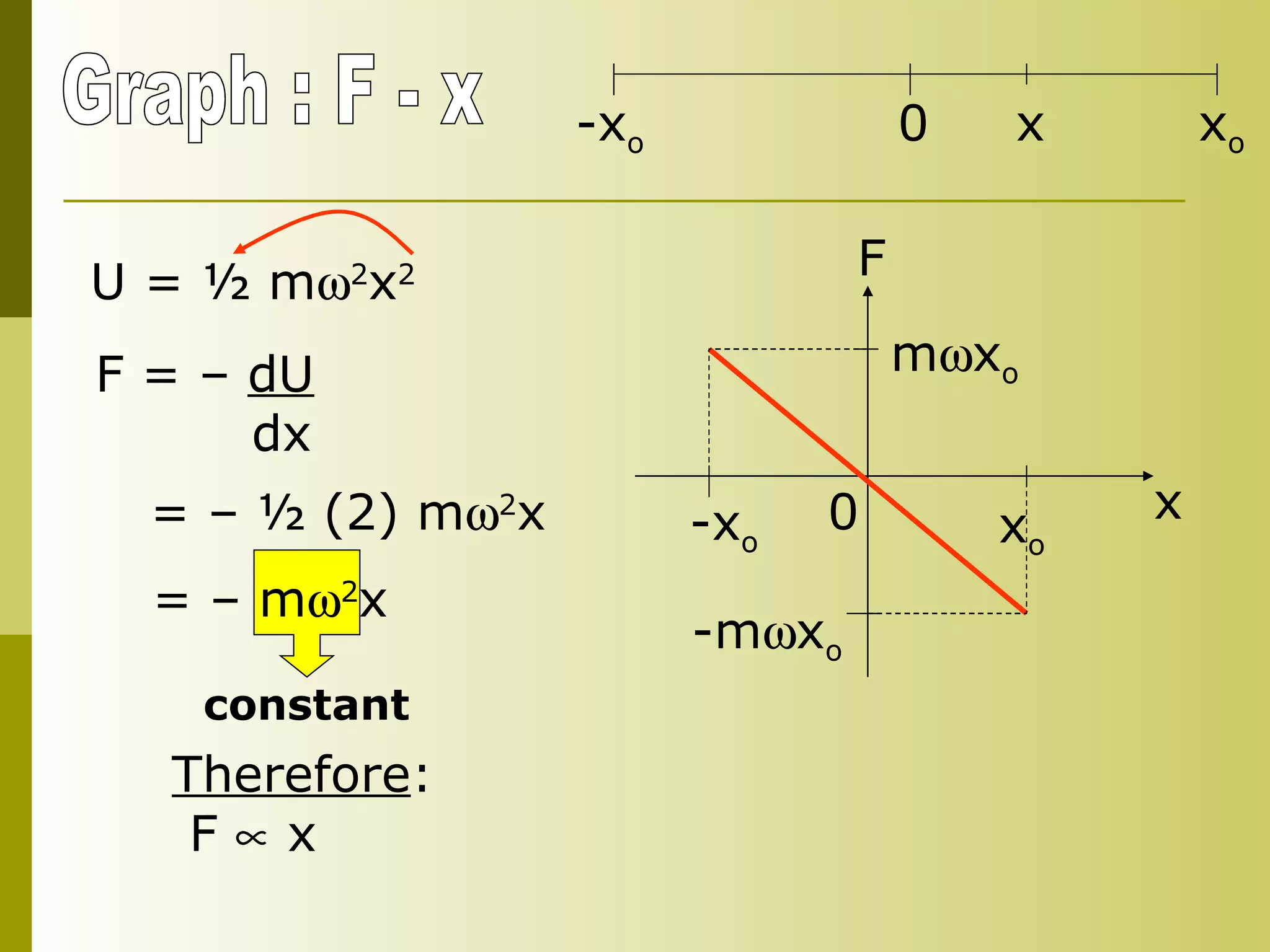
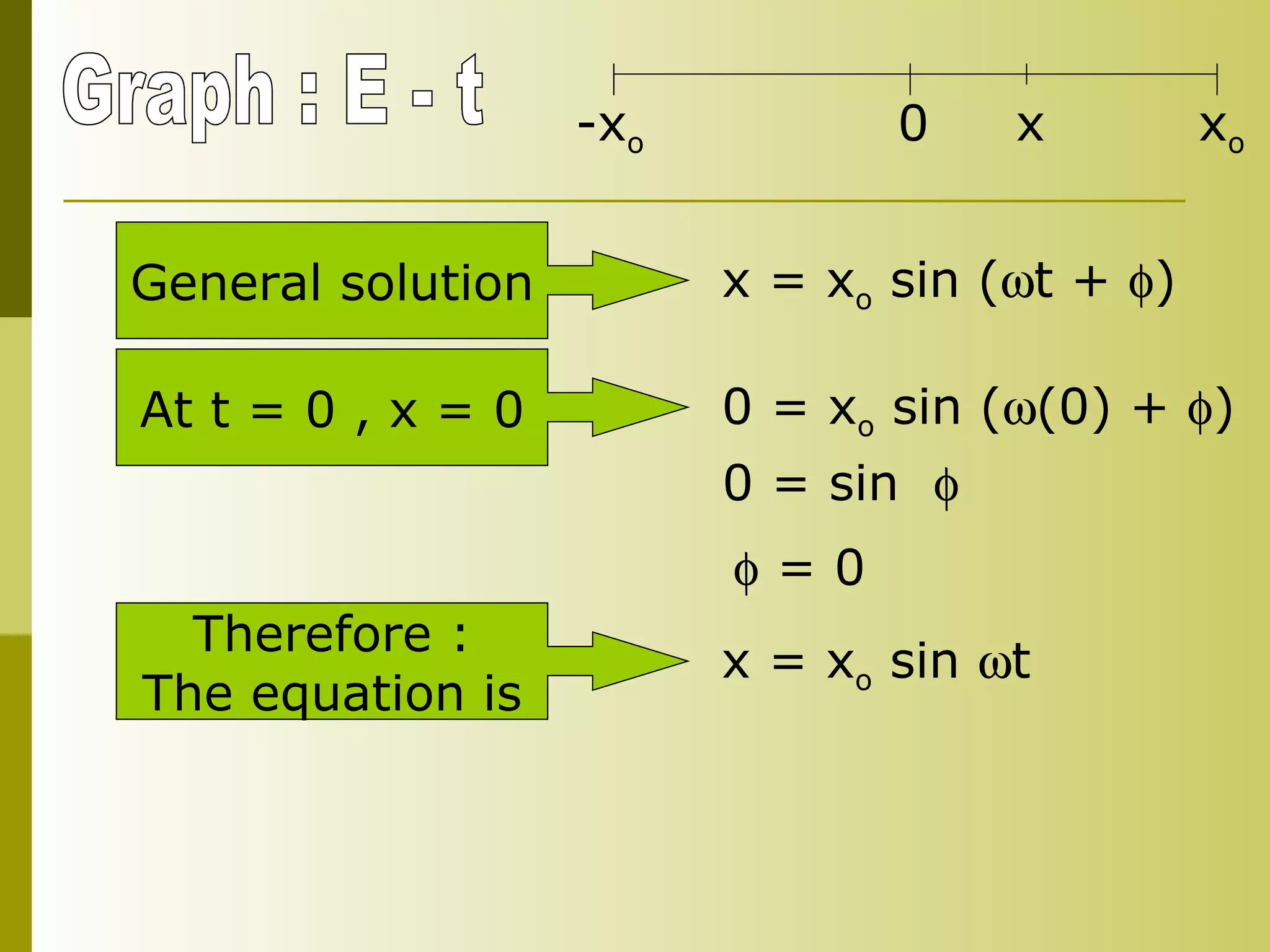
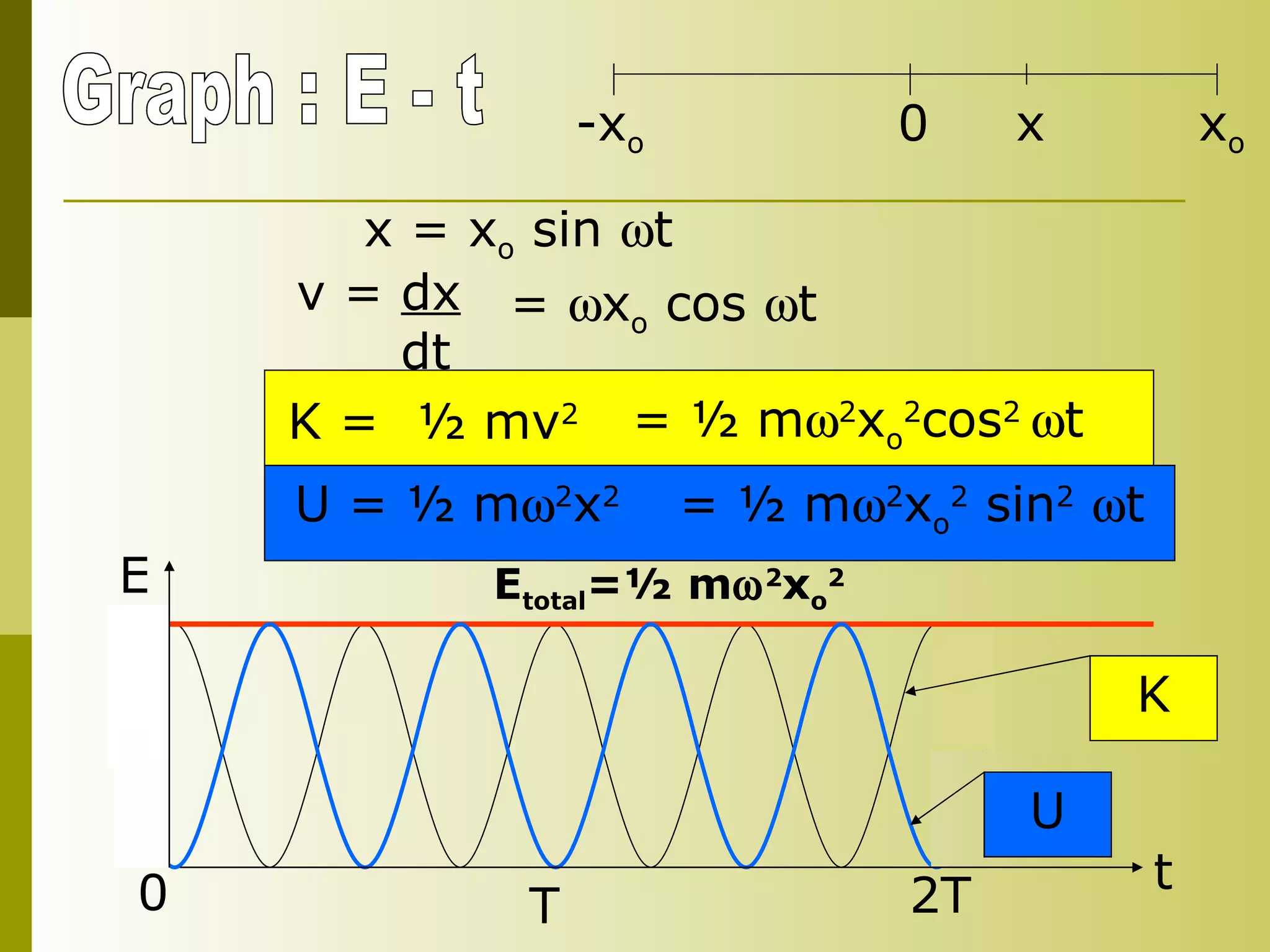

The document describes simple harmonic motion (SHM). Some key points: 1) SHM is motion where the acceleration is proportional to and directed towards the displacement from a fixed point. 2) Common examples include a vibrating tuning fork, weight on a spring, boy on a swing. 3) The motion can be defined by the force equation F = -kx, where k is the spring constant. 4) Kinematics equations for SHM include the position equation x = x0sin(ωt + φ) and related equations for velocity and acceleration.


























































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)








