Download to read offline
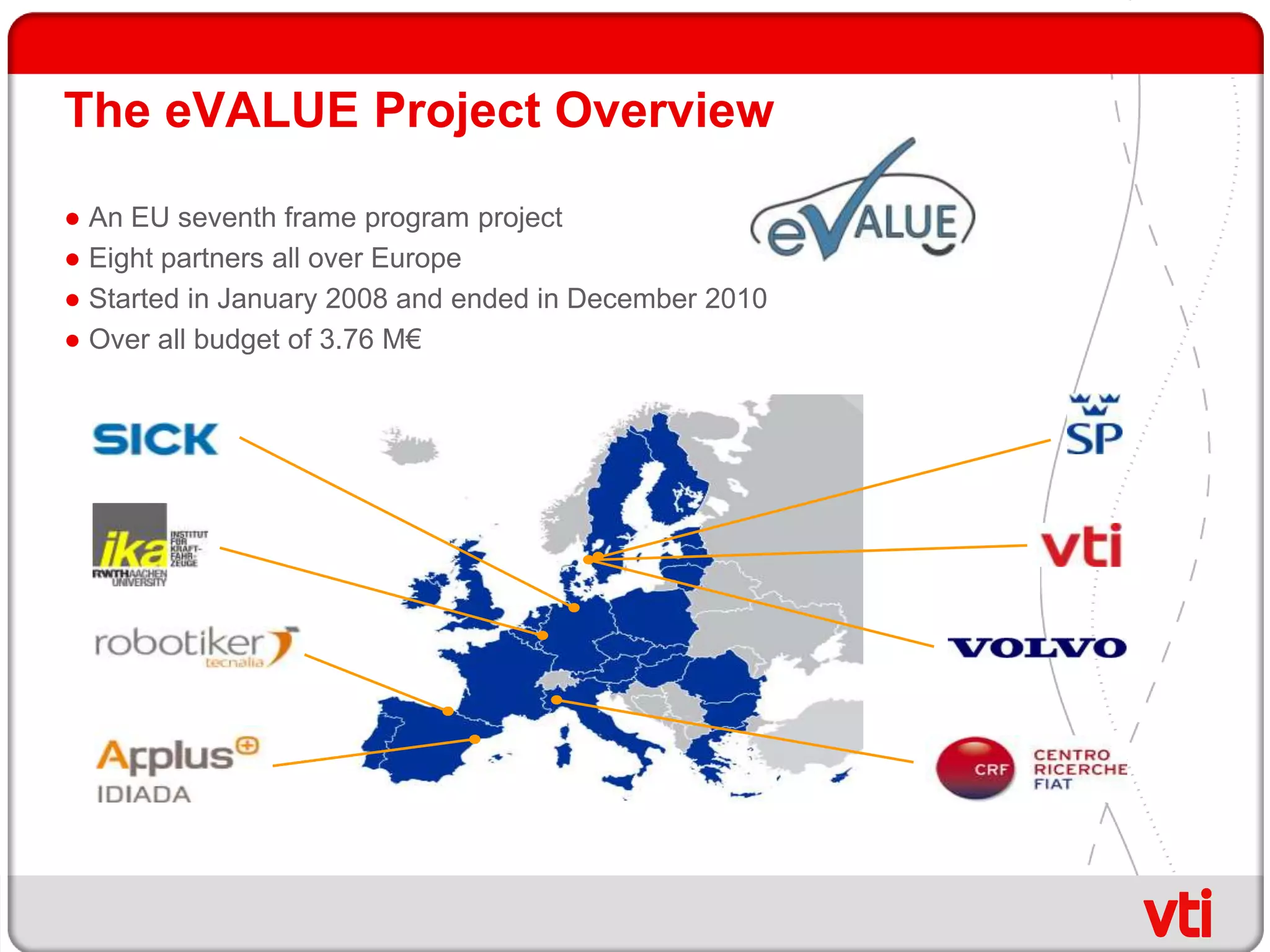
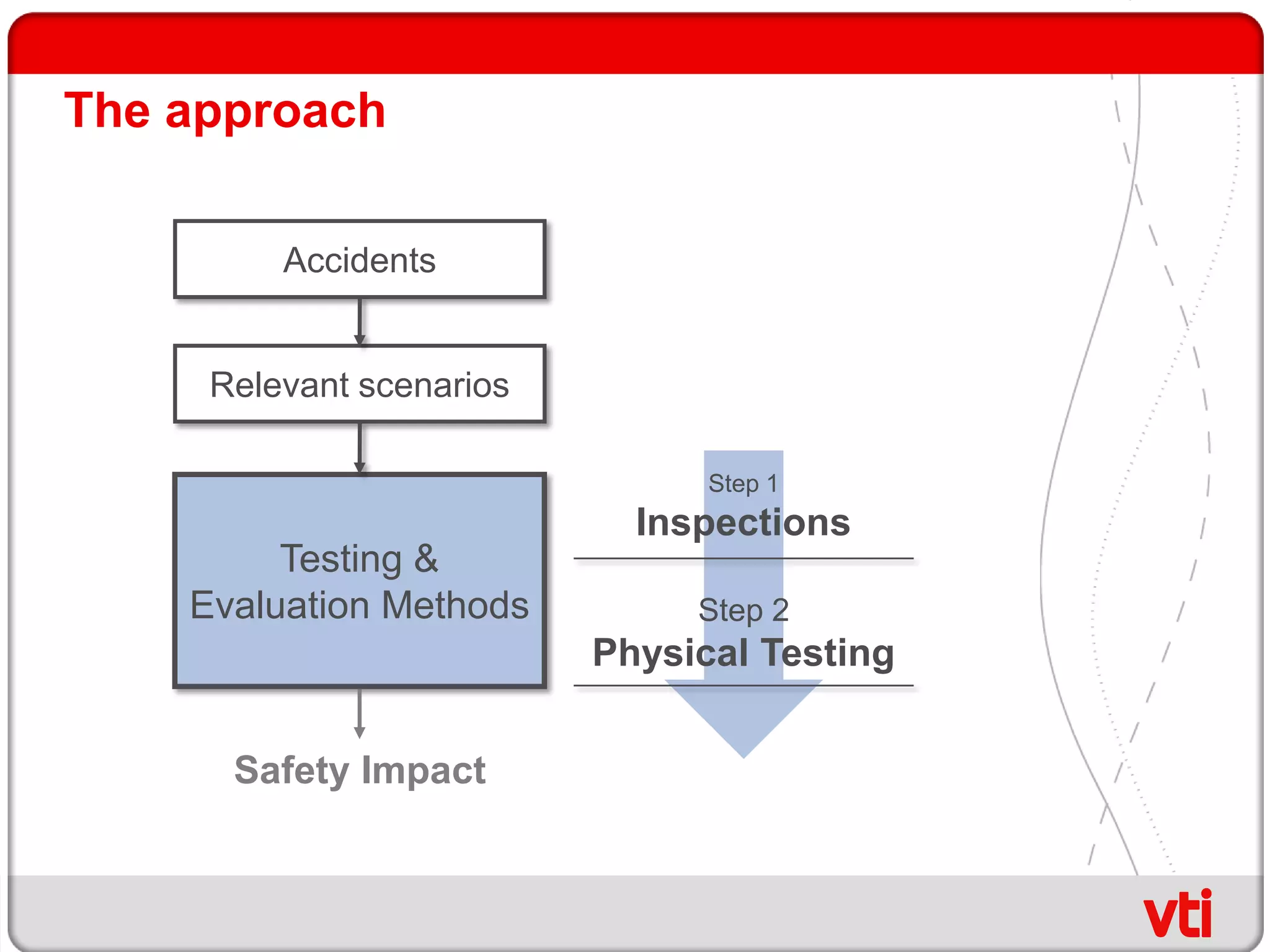
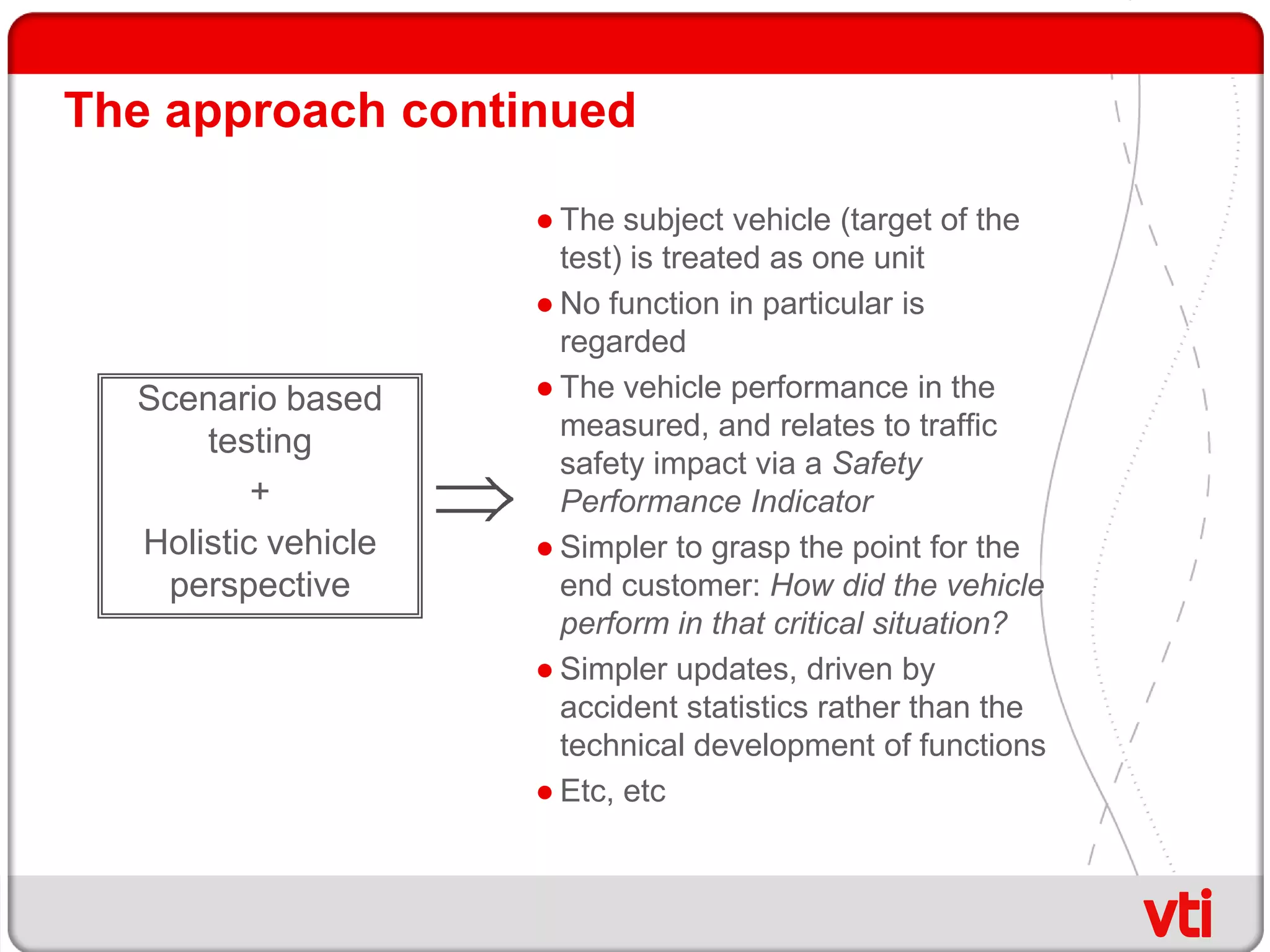
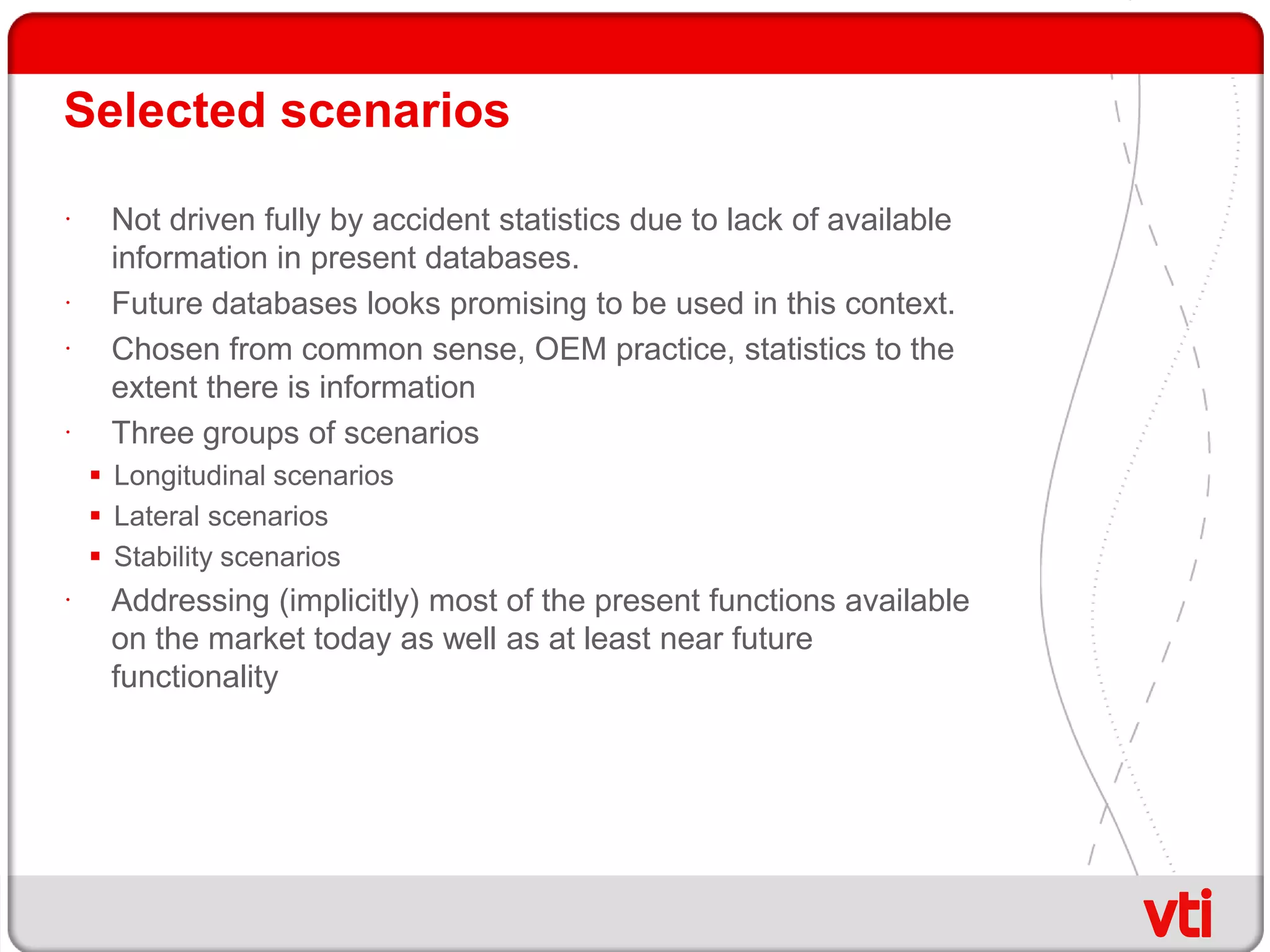
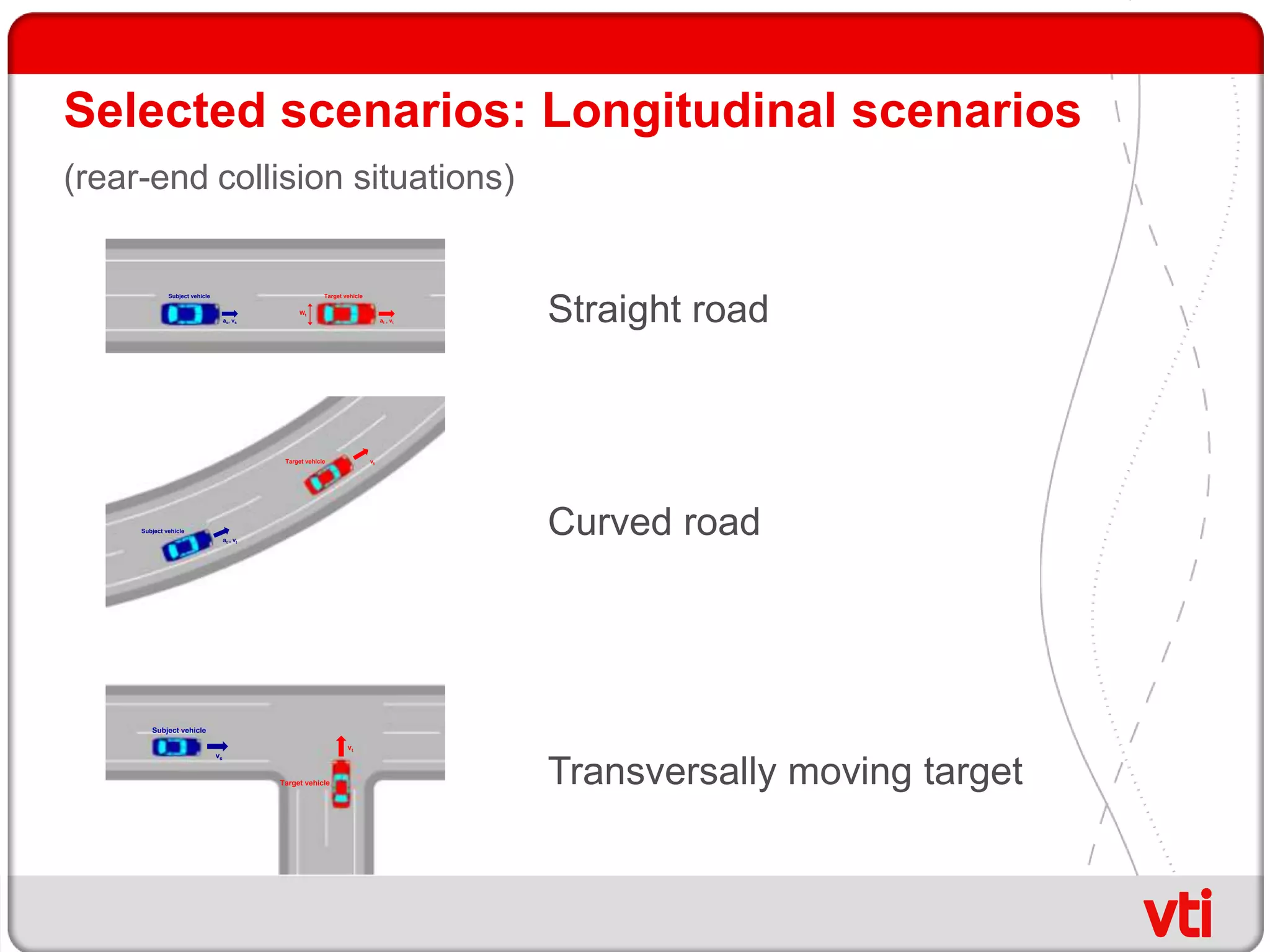
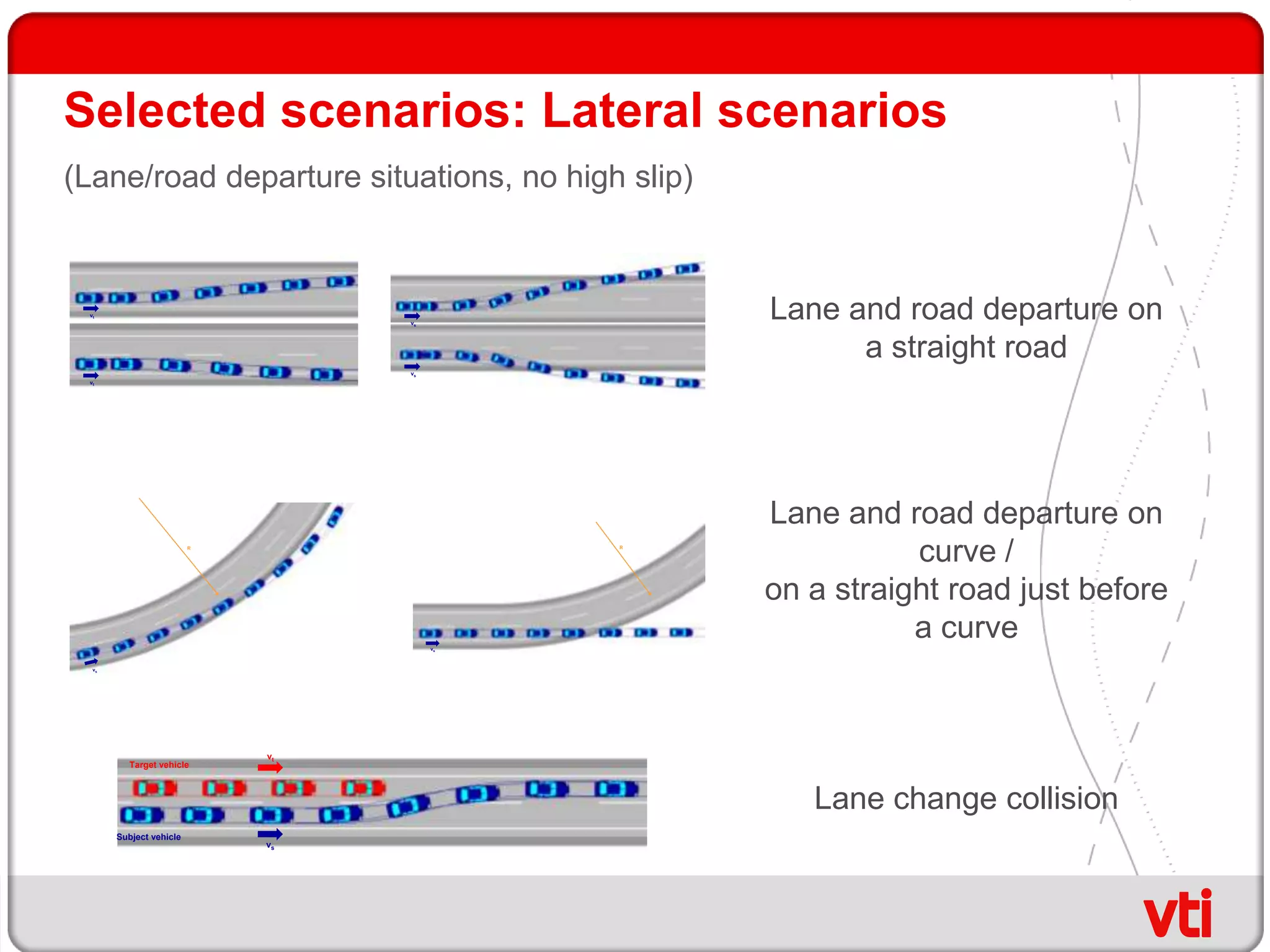
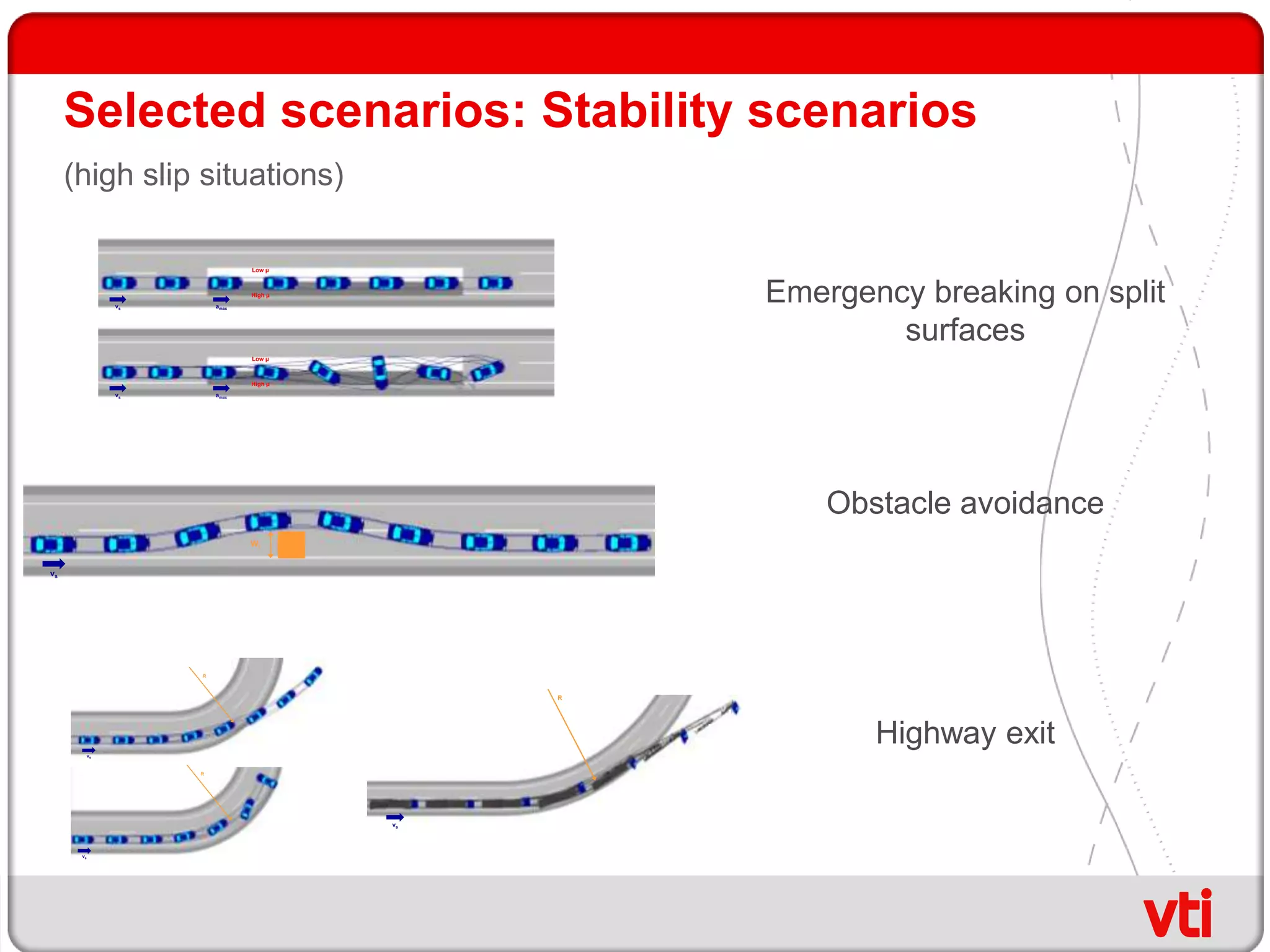
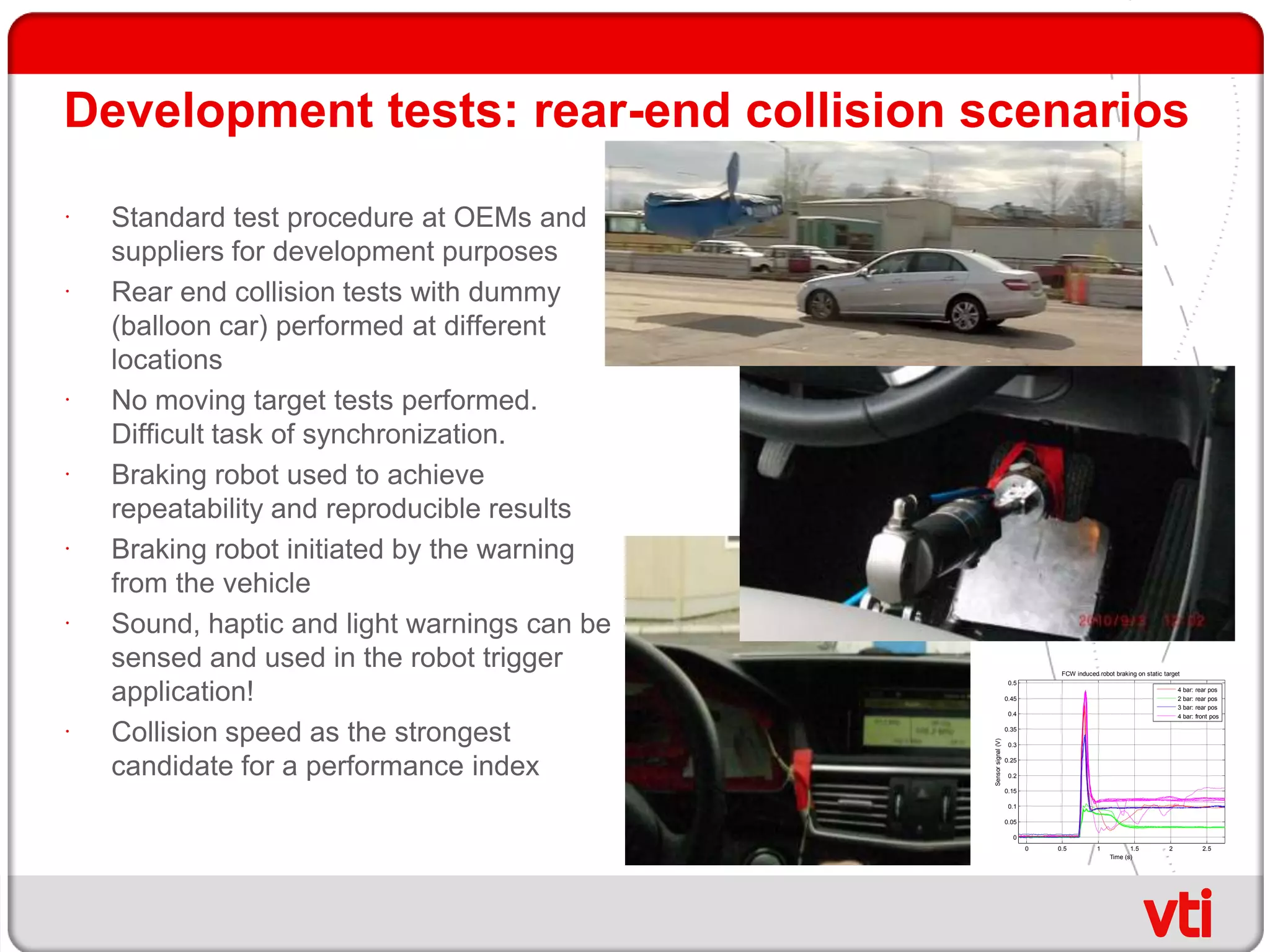

The document summarizes results from tests of active safety functions conducted as part of the eVALUE project. The project involved 8 European partners and tested vehicles using scenario-based methods to evaluate performance. Scenarios included rear-end collisions, lane departures, and stability scenarios like emergency braking on split surfaces. Tests were conducted at a test track using methods like a steering robot. The project helped develop potential safety performance indicators but open issues remained around testing repetitions, handling warnings/interventions, and ensuring test environments resembled real-world situations. The scenario-based, holistic vehicle approach proved useful but more development was still needed for performance indices and test environments.
























































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)










