Downloaded 349 times
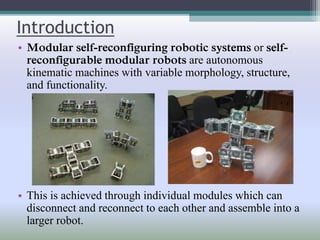

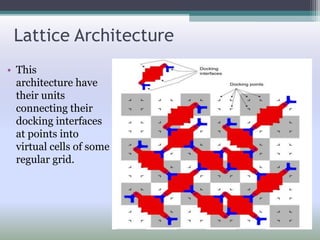
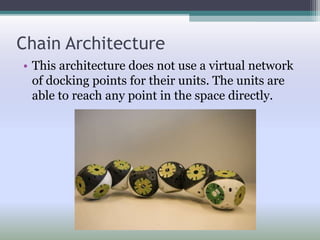
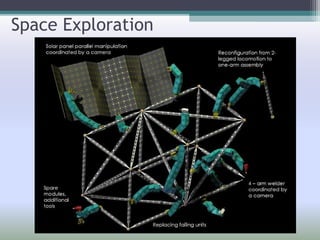
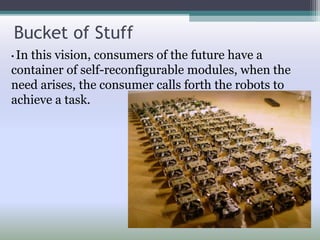


Modular self-reconfiguring robots are composed of individual modules that can disconnect and reconnect to change the robot's morphology, structure, and functionality. The modules contain actuators and docking interfaces to transfer forces, power, and communication. There are two main architectural approaches - lattice architecture arranges modules on a grid, while chain architecture allows direct connections without a grid. Applications include space exploration, telepresence robots, and configurable tools. Advantages are lower costs through mass production and functional versatility, while disadvantages include inferior performance for specific tasks and increased complexity. Future developments could realize greater benefits in flexibility and functionality.










































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)









