Downloaded 374 times
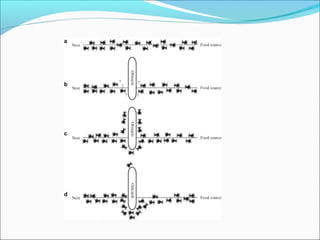
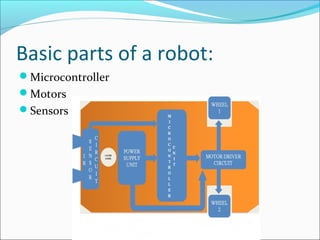
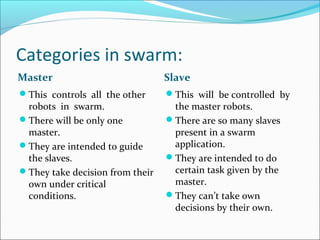



This document discusses swarm robotics and how robots communicate within a swarm. It defines swarm robotics as using small robots that communicate with each other to perform tasks. Swarms typically have a master robot that controls slave robots and guides them to complete assigned tasks. The robots communicate using transmitters and receivers that convert data between serial and parallel formats to transmit instructions and sensor readings between the master and slaves. Examples of applications for swarm robotics include industrial tasks, medical procedures, and military operations.