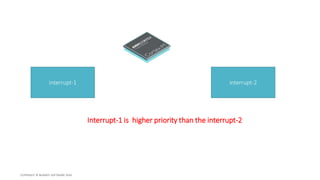
The document provides a comprehensive overview of mastering Real-Time Operating Systems (RTOS) using FreeRTOS and STM32 microcontrollers. It details the concepts of task notifications, memory management, synchronization, and various APIs available within FreeRTOS, alongside practical coding examples and licensing information. Additionally, it emphasizes the importance of following coding conventions and provides resources for further learning on embedded systems and programming.



![char do_sum( int a , int b, int c )
{
char x=1;
char y=2;
char *ptr;
ptr = malloc(100);
x = a+b+c;
return x ;
}
Local variables
Some operations
Exiting [R0 = x]
R0
R1
R2
Return address
X = 1
Y = 2
Ptr = 0x400000
a
b
c
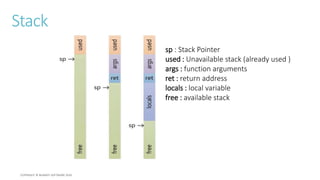
used
Free
SP
used
Free
Stack](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part2-190826054638/85/PART-2-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-44-320.jpg)