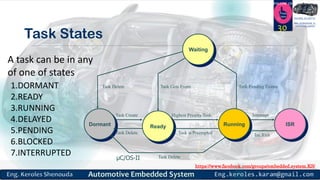
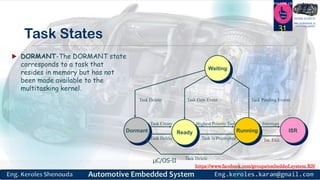
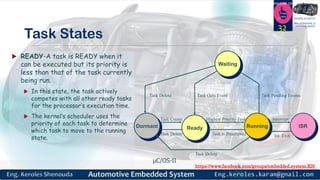
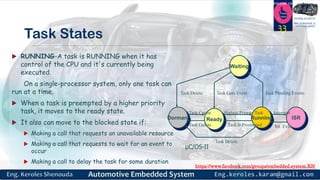
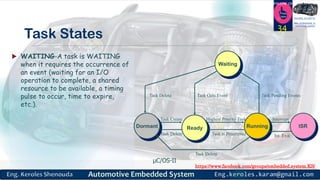
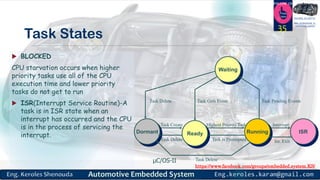
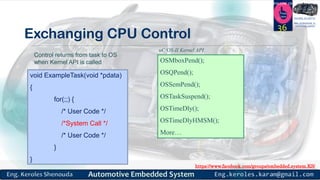
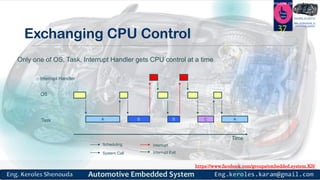
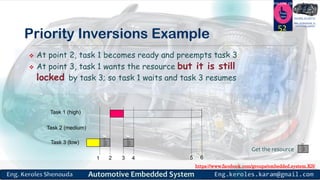
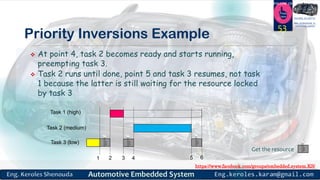
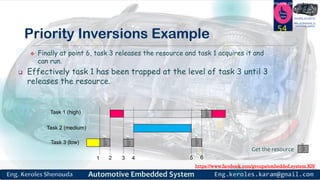
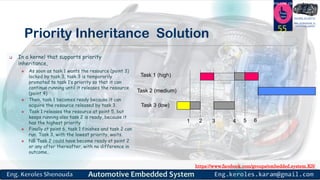
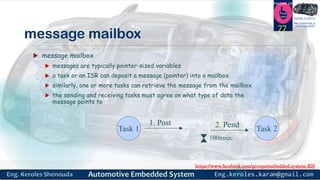
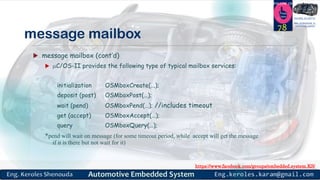
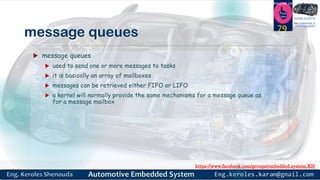
The document discusses various topics related to embedded systems and real-time operating systems (RTOS), including:
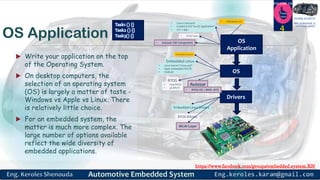
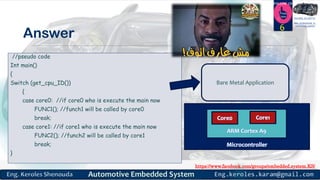
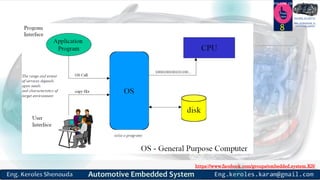
1) It explains the differences between bare-metal applications, which run directly on hardware without an OS, and OS applications, which run on top of an operating system.
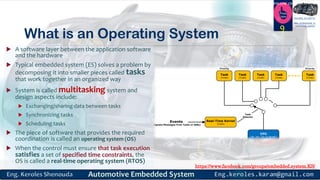
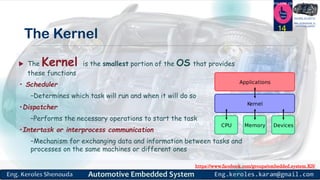
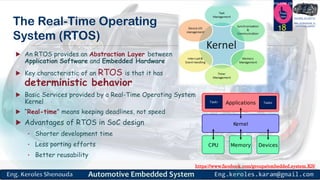
2) It describes some key characteristics and services provided by RTOS kernels, such as deterministic behavior and task scheduling.
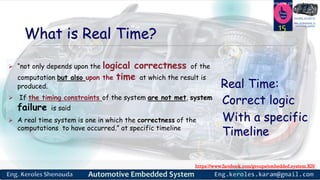
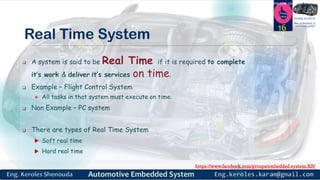
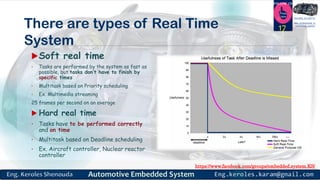
3) It discusses different types of real-time systems, including soft and hard real-time, and explains the importance of meeting timing deadlines in real-time systems.












































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)