Download to read offline
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
Robust Fuzzy Observer Design for Nonlinear
Systems
Michal Polanský, and Cemal Ardil
observers for Takagi-Sugeno systems. The method is based on Linear
matrix inequalities (LMIs) and it allows to insert H constraint into
the design procedure. The speed of estimation can tuned be
specification of a decay rate of the observer closed loop system. We
discuss here also the influence of parametric uncertainties at the
output control system stability.
The observer and controller has some similar properties
from a mathematical point of view [2][3][7], that can simplify
the development of observer design methods. We can say, that
they are dual problems. Presented research is inspired by the
paper published in [1], which deals with a robust H PDC
controller design. On its base is derived a method for an
observer design.
Keywords— H norm, Linear Matrix Inequalities, Observers,
Takagi-Sugeno Systems, Parallel Distributed Compensation
II. TAKAGI-SUGENO SYSTEM WITH OBSERVER AND
CONTROLLER
International Science Index 14, 2008 waset.org/publications/9986
Abstract—This paper shows a new method for design of fuzzy
I. INTRODUCTION
A. T-S model
I
N the past some design techniques were developed for
modeling and control of nonlinear uncertain systems. Very
interesting approach were done in the fuzzy modeling and
control, especially with Takagi-Sugeno (T-S) fuzzy modeling
[4] and related Parallel Distributed Compensation (PDC)
control algorithm [1][2]. This method uses local linear models
in the consequent of fuzzy rules. Decision variables are
designed to divide the state space of the system into areas,
where the linear local models describe precisely the nonlinear
system. In the overlapped parts of these areas are local models
interpolated according to fuzzy membership functions.
Takagi-Sugeno model based control of nonlinear systems is
quite popular now for its simple and effective design based
usually on Linear Matrix Inequalities (LMIs)[5].
The design of an observer in Takagi-Sugeno fuzzy systems
is very important part of a control system design. Estimation
of unmeasured states must be fast and should depend on the
noise and system uncertainties as less as possible. Since we
can look at the parametric uncertainties as at an input
disturbance signal, which should be attenuated, H norm of
the closed loop system should be minimized. It could be also
useful, if we can implement the parametric uncertainties into
the design method. This problem is discussed here, but it is
quite difficult and exceeds the scope of this paper.
Although many design methods for a fuzzy controller
(Parallel Distributed Compensator – PDC) are developed
[1][5][6], there can be found only a few methods for a T-S
fuzzy observer design in a literature.
The standard Takagi-Sugeno fuzzy model consists of the
set of fuzzy rules with linear consequent, that describe system
in a local areas i. For our purpose we suppose following form:
Rule i:
i
i
IF z1 (t ) is M 1i and z 2 (t ) is M 2 and … and z n (t ) is M n
THEN
x(t ) ( A i
A i )x(t ) (B1i
B1i )w (t ) (B 2i
B 2i )u(t ) ,
y (t ) Ci x(t )
where z T (t )
(1)
z1 (t ),..., z n (t ) are some premise variables,
y T (t )
y1 (t ),..., yl (t ) is an output vector,
x (t )
x1 (t ),..., xn (t ) is a state vector,
T
u (t ) u1 (t ),...,u m (t ) is a control input vector and
T
wT (t ) w1 (t ),...,w p (t ) is a disturbance vector.
i = 1,2,…,r denotes the area’s number. r is the number of
areas and thus also of fuzzy rules. M ij is a fuzzy set
( M ij (z (t )) is the grade of membership of premise variable zj(t)
in the area number i). m is the number of inputs and l is the
number of outputs of T-S fuzzy system. Matrixes A i R n n ,
B1i R n m , B 2i R n m , Ci R l n describe the system in the
area number i.
Matrixes A i , B1i a B 2i represent uncertainties in the
system. We will suppose, that uncertainties in the output
matrix Ci can be transformed into matrices B1i a B 2i . To
incorporate the uncertainties into a PDC controller design
methods is commonly used the following assumption:
Michal Polanský is with the Department of Control and Instrumentation,
Faculty of Electrical Engineering and Communication,
Brno University of Technology, Kolejní 4, 612 00 Brno, Czech Republic
(tel.: +420 5 41141128, fax : +420 5 41141123)
7](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/85/Robust-fuzzy-observer-design-for-nonlinear-systems-1-320.jpg)
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
Robust Fuzzy Observer Design for Nonlinear
Systems
Michal Polanský, and Cemal Ardil
observers for Takagi-Sugeno systems. The method is based on Linear
matrix inequalities (LMIs) and it allows to insert H constraint into
the design procedure. The speed of estimation can tuned be
specification of a decay rate of the observer closed loop system. We
discuss here also the influence of parametric uncertainties at the
output control system stability.
The observer and controller has some similar properties
from a mathematical point of view [2][3][7], that can simplify
the development of observer design methods. We can say, that
they are dual problems. Presented research is inspired by the
paper published in [1], which deals with a robust H PDC
controller design. On its base is derived a method for an
observer design.
Keywords— H norm, Linear Matrix Inequalities, Observers,
Takagi-Sugeno Systems, Parallel Distributed Compensation
II. TAKAGI-SUGENO SYSTEM WITH OBSERVER AND
CONTROLLER
International Science Index 14, 2008 waset.org/publications/9986
Abstract—This paper shows a new method for design of fuzzy
I. INTRODUCTION
A. T-S model
I
N the past some design techniques were developed for
modeling and control of nonlinear uncertain systems. Very
interesting approach were done in the fuzzy modeling and
control, especially with Takagi-Sugeno (T-S) fuzzy modeling
[4] and related Parallel Distributed Compensation (PDC)
control algorithm [1][2]. This method uses local linear models
in the consequent of fuzzy rules. Decision variables are
designed to divide the state space of the system into areas,
where the linear local models describe precisely the nonlinear
system. In the overlapped parts of these areas are local models
interpolated according to fuzzy membership functions.
Takagi-Sugeno model based control of nonlinear systems is
quite popular now for its simple and effective design based
usually on Linear Matrix Inequalities (LMIs)[5].
The design of an observer in Takagi-Sugeno fuzzy systems
is very important part of a control system design. Estimation
of unmeasured states must be fast and should depend on the
noise and system uncertainties as less as possible. Since we
can look at the parametric uncertainties as at an input
disturbance signal, which should be attenuated, H norm of
the closed loop system should be minimized. It could be also
useful, if we can implement the parametric uncertainties into
the design method. This problem is discussed here, but it is
quite difficult and exceeds the scope of this paper.
Although many design methods for a fuzzy controller
(Parallel Distributed Compensator – PDC) are developed
[1][5][6], there can be found only a few methods for a T-S
fuzzy observer design in a literature.
The standard Takagi-Sugeno fuzzy model consists of the
set of fuzzy rules with linear consequent, that describe system
in a local areas i. For our purpose we suppose following form:
Rule i:
i
i
IF z1 (t ) is M 1i and z 2 (t ) is M 2 and … and z n (t ) is M n
THEN
x(t ) ( A i
A i )x(t ) (B1i
B1i )w (t ) (B 2i
B 2i )u(t ) ,
y (t ) Ci x(t )
where z T (t )
(1)
z1 (t ),..., z n (t ) are some premise variables,
y T (t )
y1 (t ),..., yl (t ) is an output vector,
x (t )
x1 (t ),..., xn (t ) is a state vector,
T
u (t ) u1 (t ),...,u m (t ) is a control input vector and
T
wT (t ) w1 (t ),...,w p (t ) is a disturbance vector.
i = 1,2,…,r denotes the area’s number. r is the number of
areas and thus also of fuzzy rules. M ij is a fuzzy set
( M ij (z (t )) is the grade of membership of premise variable zj(t)
in the area number i). m is the number of inputs and l is the
number of outputs of T-S fuzzy system. Matrixes A i R n n ,
B1i R n m , B 2i R n m , Ci R l n describe the system in the
area number i.
Matrixes A i , B1i a B 2i represent uncertainties in the
system. We will suppose, that uncertainties in the output
matrix Ci can be transformed into matrices B1i a B 2i . To
incorporate the uncertainties into a PDC controller design
methods is commonly used the following assumption:
Michal Polanský is with the Department of Control and Instrumentation,
Faculty of Electrical Engineering and Communication,
Brno University of Technology, Kolejní 4, 612 00 Brno, Czech Republic
(tel.: +420 5 41141128, fax : +420 5 41141123)
7](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/75/Robust-fuzzy-observer-design-for-nonlinear-systems-1-2048.jpg)
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
( A i , B1i , B 2i ) DFi (t )[E1i , E 2i , E 3i ]
F (t )Fi (t ) I
T
i
ˆ
estimation error e(t ) instead of x(t ) . The computation of time
derivative of estimation error is then:
ˆ
e(t ) x(t ) x(t )
(2)
where D, E1i ,E 2i ,E3i are known, real, constant matrixes with
appropriate dimensions. I is identity matrix and Fi (t ) are
unknown matrix functions with Lebesgue-measurable
elements.
The defuzzified output can be represented as follows:
r
hi (z (t )).
x(t )
hi (z (t )){[ A i
r
A i ]x(t )
y (t )
r
B1i ]w (t ) [B 2i
B 2i ]u(t )}
hi (z (t ))
ˆ
ˆ
A i [x(t ) x(t )] G i [y (t ) y (t )] B1i w (t )
A i x(t )
i 1
r
hi (z (t ))
r
Gi
B 2i u(t )
ˆ
h j (z (t ))C j [x(t ) x(t )] B1i w (t )
j 1
i 1
A i x(t )
n
M ij ( z j (t ))
hi (z (t ))
B1i w (t )
ˆ
A i [x(t ) x(t )]
(3)
hi (z (t ))C i x(t )
j 1
n
r
B 2i u(t )
ˆ
ˆ
hi (z (t )) A i x(t ) B 2i u(t ) G i [y (t ) y (t )]
i 1
where
B1i w (t )
i 1
i 1
[B1i
A i x(t )
i 1
r
r
A i x(t ) B1i w (t ) B 2i u(t )
r
(4)
hi (z (t ))
i 1
r
B1i w (t )
(7)
B 2i u(t )
( A i G i C j )e(t ) B1i w (t )
h j (z (t ))
A i x(t )
j 1
B1i w (t )
B 2i u(t )
International Science Index 14, 2008 waset.org/publications/9986
M ij ( z j (t ))
i 1 j 1
r
If z(t) is in the specified range, then
In the case that the matrixes
we get
hi (z (t )) 1
A i 0,
B1i 0,
B 2i 0
i 1
This representation can be easily implemented into a Matlab
model.
e(t )
r
hi (z (t ))
(t )
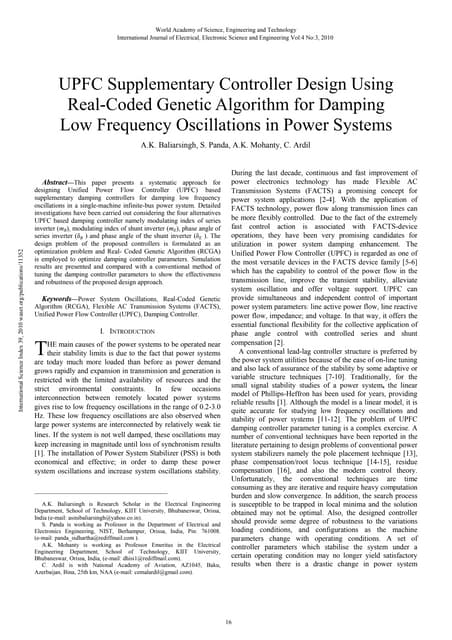
B. Fuzzy State Observer
h j (z (t ))[( A i G i C j )e(t ) B1i w (t )]
j 1
i 1
r
r
, (8)
hi (z (t ))C i e(t )
i 1
Here we can suppose, that the disturbance signal is not
measured. Also the observer don’t have information about
parametric uncertainties. Fuzzy state observer is described by
the following fuzzy rules:
where
ˆ
(t ) y (t ) y (t ) is an output estimation error.
If we define Lij A i G i C j , then we get
Observer rule i:
i
i
IF z1 (t ) is M 1i and z 2 (t ) is M 2 and … and zn(t) is M n
e(t )
r
r
hi (z (t ))h j (z (t ))[L ij e(t ) B1i w (t )] .
(9)
i 1 j 1
ˆ
ˆ
ˆ
THEN x(t ) A i x(t ) B 2i u(t ) G i [y (t ) y (t )] ,
ˆ
ˆ
y (t ) Ci x(t ),
C. PDC Fuzzy Control Algorithm
(5)
The control signal of PDC controller is computed as
where Gi is an observer gain in the area number i.
ˆ
ˆ
ˆ
xT (t ) x1 (t ),..., xn (t ) is estimated state vector and
ˆ
ˆ
ˆ
y (t ) y1 (t ),..., yl (t ) is a vector of estimated outputs.
After defuzzyfication we get the following equations:
r
r
ˆ
ˆ
hi (z (t )) A i x(t ) B 2i u(t ) G i [y (t ) y (t )] ,
ˆ
hi (z (t ))C i x(t ) .
(10)
where K i R m n is a constant feedback gain.
If some state variables have to be estimated by a fuzzy
observer, then the control output is computed in the following
way:
i 1
ˆ
y (t )
hi (z (t ))K i x(t )
i 1
T
ˆ
x(t )
r
u(t )
(6)
u(t )
i 1
r
ˆ
hi (z (t ))K i x(t )
(11)
i 1
The aim of the observer is to eliminate estimation error as
fast as possible. Estimation error is defined as
ˆ
e(t ) x(t ) x(t )
It will be useful to convert the equation (6) in the form with
The closed loop system we get by combination of (10) and
(3). Then
8](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/85/Robust-fuzzy-observer-design-for-nonlinear-systems-2-320.jpg)
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
r
r
x(t )
hi (z (t ))h j (z (t ))
[( A i
A i (B 2 i
B 2i )K j )x(t ) B1i w (t )
In the case that the matrixes
we get
x(t )
r
r
B1i ZCT
i
2
B
I 0
Ci Z 0
I
(12)
i 1 j 1
A i 0,
ii
T
1i
B1i w (t )]
B1i 0,
B 2i 0
B1i B1 j ZCT ZCTj
i
B B
2 2I
0
Ci Z C j Z
0
2I
ij
T
1i
hi (z (t ))h j (z (t ))[( A i B i K j )x(t ) B1i w (t )] (13)
i 1 j 1
where
If we define Fij A i B i K j , then we get the system equation
x(t )
r
r
hi (z (t ))h j (z (t ))[Fij x(t ) B1i w (t )] ,
0 , i 1,2,..., r ,
ji
T
1j
(18)
0 , 0 i j r , (19)
A i Z ZAT B 2i M j M Tj BTi 2 Z ,
2
i
ij
The gain of the robust controller the will be:
K i Mi Z
(14)
1
(20)
i 1 j 1
The optimization objective is to minimize .
International Science Index 14, 2008 waset.org/publications/9986
which is formally identical to (9). The important result is that
fuzzy observer and PDC controller are dual problems and we
may transform the PDC controller design methods to be used
for design of an observer.
Proof: We choose the following substitution:
A
Bw
w
2
0
Cy
hi (z (t ))B1i ,
r
hi (z (t ))Ci ,
Then the closed loop system (13) will be transformed to
x(t ) Ax(t ) B w w (t )
y (t )
2
w (t )
2
.
(15)
w (t ) 2
Lyapunov function we choose V (x(t )) xT (t )Px(t ) , where
P 0 . If we suppose zero initial conditions, then from (17) we
get
xT (t )( A T P PA 2 P)x(t ) 0
.
A T P PA 2 P 0
is specified by a condition
2 V (x(t )) ,
(22)
The system then will be stable with a decay rate > 0. It
holds if there exists matrix P 0 that fulfill the matrix
inequality
(16)
The method minimizes , that is an upper bound of Tyw
V (x(t ))
(21)
y (t ) C y x(t )
is taken from all trajectories from the initial conditions
x(0) 0 .
We suppose, that
Decay rate
r
i 1
where Tyw is transfer matrix of a system (13) and supremum
y (t ) 2
hi (z (t ))h j (z (t ))[A i B 2i K j ],
i 1
The method have been published by Lee, Jeung and Park in
[1]. The objective is to minimize H norm, that determine a
disturbance attenuation and is frequently used also as a
robustness measure. H norm is defined as
sup
r
i 1 j 1
III. ROBUST CONTROLLER DESIGN
Tyw
r
(23)
To implement the H norm we will now suppose that
(17)
V (x(t )) y T (t )y (t )
Theorem 1: Equilibrium of a T-S fuzzy system with a PDC
control (10) is asymptotically stable in large with a decay rate
, if there exists a common positive
0 and Tyw
w T (t )w (t ) 0 .
(24)
Then H norm of the system (21) is less than
condition (24) is equivalent to
where V (x(t )) is a Lyapunov function, that must be always
positive with a negative time derivative.
The controller design method is summarised in Theorem 1.
[5]. The
2
x T (t )( A T P PA C T C y )x(t ) x T (t )P B w w (t )
y
T
w T (t ) B w Px (t )
definite matrix Z > 0, > 0 and matrices Mi, i 1,2,..., r such
that the following LMIs conditions hold.
This is equivalent to
9
2
w T (t )w (t ) 0
(25)](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/85/Robust-fuzzy-observer-design-for-nonlinear-systems-3-320.jpg)
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
We suppose, that
A T P PA C T C y P B w
y
T
2
Bw P
I
(26)
0
(t )
e
2
w (t )
(32)
2
To fulfill both conditions (22) and (25) must hold:
T
A T P PA C y C y 2 P P B w
T
2
Bw P
I
(27)
0
The decay rate
This inequality is not linear, but we can transform it into a
LMI. At first we introduce a matrix Z P 1 and we will
multiply (27) by Z 0 . Using S-procedure we obtain
0 I
ZA T AZ 2 Z B w Z C T
y
T
2
Bw
I 0
CyZ
I
0
0,
International Science Index 14, 2008 waset.org/publications/9986
2 eVe (x(t )) ,
(33)
where Ve (x(t )) is a Lyapunov function, that must be always
positive with a negative time derivative.
We will start from the equation (27), where remain matrices
r
Bw
(28)
hi (z (t ))B1i and C y
i 1
r
r
hi (z (t ))C i and newly defined is
i 1
r
hi (z (t ))h j (z (t ))[A i G i C j ] that replaces matrix
i 1 j 1
that is equivalent to
r
that is an upper bound of
is specified by a condition
e
Ve (x(t ))
Ae
r
e,
The method minimizes
Tw .
ZFij
Fij Z 2 Z B1i ZC
2
T
B1i
I 0
Ci Z
I
0
T
A . Matrix P is replaced by Y. The closed loop system (8) is
then transformed to
T
i
hi (z (t ))h j (z (t ))
i 1 j 1
0 (29)
e(t ) A e e(t ) B w w (t )
(34)
(t ) C y e(t )
where Fij A i B 2i K j .
Lyapunov function we choose
This LMI can be also written as
r
i
Ve (e(t )) eT (t )Ye(t ) ,
B1i ZC
2
2
hi (z (t )) B
I 0
1
Ci Z 0
I
T
i
ii
T
1i
r
r
hi (z (t ))h j (z (t ))
where
ij
where Y > 0.
For H norm must hold that
i 1 i j
B1i B1 j ZCT ZCTj
i
B B
2 2I
0
Ci Z C j Z
0
2I
ij
T
1i
ji
T
1j
(30)
Ve (e(t ))
0
Now we will derive the LMI method for an observer design.
The objective is again to minimize H norm, that determine
now a disturbance attenuation on the output estimation error.
H norm T w
e is then defined as
r
r
hi (z (t ))h j (z (t ))
i 1 j 1
2
0
w (t )
2
.
hi2 (z (t ))
i 1
(31)
r
r
2
where T w is transfer matrix of a system (8).
(36)
(37)
0
LTij Y YL ij CT Ci 2 Y YB1i
i
2
T
B1i Y
eI
0 (38)
or
r
w
w T (t )w (t ) 0 .
Inequality (37) consists all requirements, whose are the
stability, the H norm determined by its upper bound e and
the decay rate . This inequality we can write also as
IV. FUZZY OBSERVER DESIGN
sup
2
e
(t ) (t )
T
A T Y YA C y C y 2 Y Y B w
2
T
Bw Y
eI
and M i K i Z .
This is equivalent to the LMI conditions in the Theorem 1.
Tw
T
Then the H norm of a system with observer (31) is less
than e [5]. The condition (27) is transformed to
A i Z ZAT B 2i M j M Tj BTi 2 Z
2
i
(t )
(35)
i 1 i
where
10
ij
ii
T
B1i Y
YB1i
2
eI
YB1i YB1 j
hi (z (t ))h j (z (t )) T
B1i Y B Y
2 2I
e
j
ij
ji
T
1j
AT Y CTj J T YAi J i C j CT Ci 2 Y .
i
i
i
(39)
0](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/85/Robust-fuzzy-observer-design-for-nonlinear-systems-4-320.jpg)
![World Academy of Science, Engineering and Technology
International Journal of Mathematical, Computational Science and Engineering Vol:2 No:2, 2008
We are now able to formulate the LMI conditions for the
observer design method.
Theorem 2: State fuzzy observer (13) maintains asymptotical
stability of an estimation error e(t ) 0 , H norm T w
e
, if there will exist matrix J i , positive
definite matrix P 0 and scalars e 0 and
0 , that the
following LMI conditions hold
and decay rate
YB1i
T
2
B1i Y
eI
ii
0 i 1,2,..., r ,
YB1i YB1 j
2 2I
B Y B Y
e
ij
ji
T
1j
T
1i
where
YG i .
Y 1J i .
Proof: It implies from the above results.
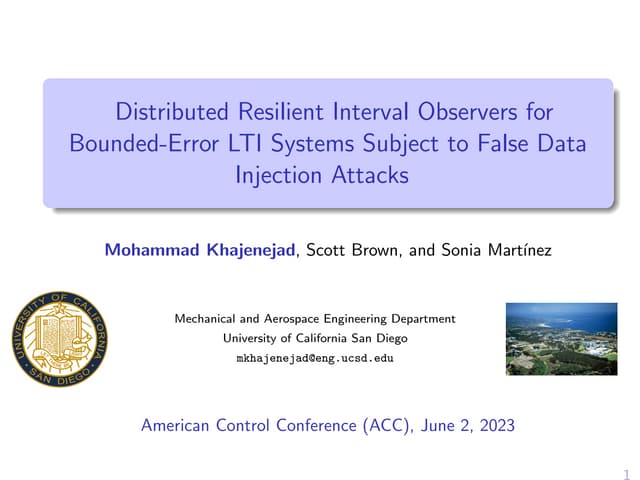
V. OBSERVER BASED FUZZY CONTROL DESIGN
Observer is a very important part of the control system. The
quality of the observer may dramatically change the speed and
parameters of a controller, e.g. the H norm. The observer
should attenuate disturbances, be as fast, as possible and
should not depend much on parametric uncertainties.
Hopefully Ma et Sun in [3] found so called separation
property that if both controller and observer are stable, then
the overall observer based control system is stable too. Only
the control quality parameters will change. We are thus
allowed to design these parts separately.
By combination of the T-S fuzzy system (3) without
parametric uncertainties, observer (6) and PDC control (11)
we get the overall state equation, from which is the separation
property well observable:
Ai BiK j
BiK j
0
Ai G iC j
x(t )
e(t )
~ ~ ~~
A T P PA i 0
i
holds for i 1,2,..., r .
This condition have to be incorporated into a design
method. The parametric uncertainties can be included in the
form (2). In further research we will concern on this problem.
x(t )
e(t )
B1i
w (t )
B1i
The paper deals with a fuzzy observer design problem. The
method is based on a convex numerical optimization of a set
of LMIs. The LMI conditions are derived here and allow us to
increase robustness against input disturbances and parametric
uncertainties by minimizing of the upper bound of the H
norm. The fast state estimation is ensured by specifying of
minimal decay rate parameter.
The duality of the controller and observer is shown here.
The observer design method is then derived on a base of
results in [1], where a method for a PDC controller design is
published.
The paper also discuss the problem of design of the
observer based control fuzzy system, where can be both parts
designed separately due to a separation principle. The
different situation comes if we would like to incorporate the
parametric uncertainties into the design process. It was shown,
that there are some differences between the observer and PDC
controller in this case and that it is possible to find a method,
that could cope with this problem, only if we will work with
an overall system consisting both state variables an estimation
error variables.
REFERENCES
[1]
(42)
[2]
If we incorporate parametric uncertainties into the system,
then the design problem is more complicated.
x(t )
e(t )
Ai
B1i
B1i
r
r
i 1 j 1
B1i
w (t )
B1i
r
i 1 j
r
[3]
[4]
hi (z (t ))h j (z (t ))
A i ( B 2 i B 2 i )K j
A i B 2i K j
(43)
V. CONCLUSIONS
The observer gain is then computed as G i
International Science Index 14, 2008 waset.org/publications/9986
(41)
i, j 1,2,..., r ,
0
AT Y CTj J T YAi J i C j CT Ci 2 Y ,
i
i
i
ij
and J i
(40)
element disappeared. The separation property will not hold.
The problem is difficult to solve since the design method must
assure the Lyapunov stability of the overall system. In the
sense of quadratic Lyapunov stability, that is commonly used
for T-S fuzzy systems it means that the there must exist a
~
common matrix P that
(B 2 i B 2 i )K j
Ai G iC j
x(t )
e(t )
~ x(t )
hi (z (t ))h j (z (t )) A i
e(t )
1
(43)
[5]
[6]
~
B i w (t )
[7]
We can see, that the stability can be changed since the zero
11
K. R. Lee, E. T. Jeung, H. B. Park, “Robust fuzzy H control for
uncertain nonlinear systems via state feedback: an LMI approach”.
Fuzzy Sets and Systems. 2001, vol. 120, p. 123–134
M. Polansky, “Nová metoda ARPDC pro zvýšení kvality robustního
ízení nelineárních systém ” Dissertation thesis, Faculty of electrical
engineering and Communication at Brno University of Technology,
2005, in Czech
X. J. Ma, Z. Q. Sun, “Analysis and design of fuzzy controller and fuzzy
observer” IEEE Trans. Fuzzy Systems. 1998, vol. 6, no. 1, p. 41–51.
T. Takagi, M. Sugeno, “Fuzzy identification of systems and its
applications to modeling and control” IEEE Transactions on Systems,
Man and Cybernetics. 1985, vol. 1, no. 1, p. 116–132
S. Boyd, L. El Ghaoui, E. Ieron, V. Balakrishnan, “Studies in Applied
Mathematics : Linear Matrix Inequalities in System and
ControlTheory”. SIAM, Philadelphia, PA, 1994
S.G.Cao, N.W.Rees, G. Feng, H control of uncertain fuzzy continuoustime systems. Fuzzy Sets and Systems. 2000, vol. 115, p. 171-190
V. Ku era, Analysis and design of discrete linear control systems.
Prentice Hall, 1991](https://image.slidesharecdn.com/robust-fuzzy-observer-design-for-nonlinear-systems-140127055620-phpapp01/85/Robust-fuzzy-observer-design-for-nonlinear-systems-5-320.jpg)

This document summarizes a new method for designing robust fuzzy observers for nonlinear systems based on Takagi-Sugeno fuzzy models. The method uses linear matrix inequalities to design observers that minimize the H-norm of the closed loop system, providing a measure of robustness and disturbance attenuation. The observer design method is similar to existing parallel distributed compensation controller design methods, making it possible to adapt controller design techniques for observer design. The observer estimates system states and outputs based on measured outputs and system inputs while attenuating effects of disturbances and uncertainties.