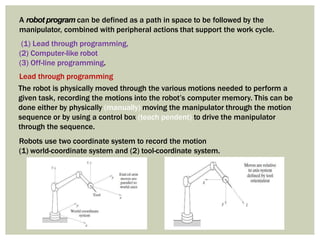
This document discusses robot programming methods, accuracy, repeatability, and applications. It covers three main robot programming methods: lead-through programming, offline programming, and computer-like programming. It also defines resolution, accuracy, and repeatability as they relate to a robot's ability to position its end-of-wrist. Finally, it discusses several common robot applications including material handling, processing operations like welding and painting, and assembly.