Downloaded 58 times



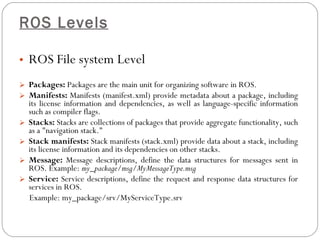

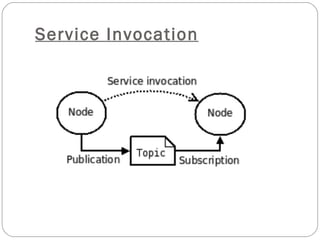
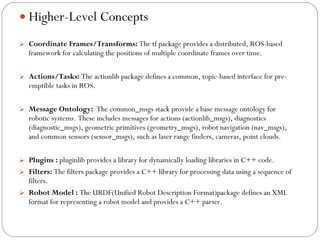
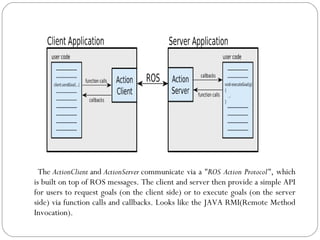
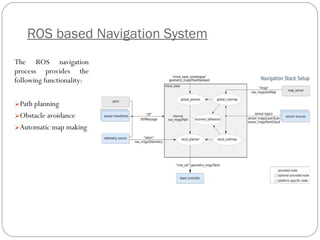
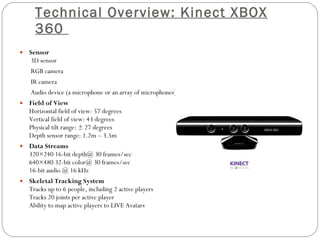
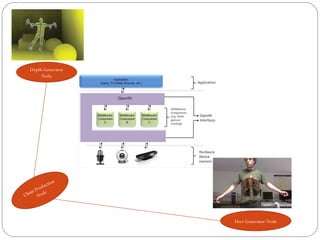
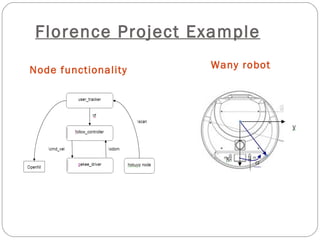

The document provides an overview of Robot Operating System (ROS) and demonstrates the Kinect XBOX 360 sensor using ROS. It describes the different levels of ROS including packages, stacks, messages and services. It also explains node communication and concepts like coordinate frames, actions, and plugins. Finally, it gives technical details of the Kinect sensor and demonstrates its capabilities for skeletal tracking and gesture recognition using OpenNI and ROS.

























![Protocol Ppt[1]](https://cdn.slidesharecdn.com/ss_thumbnails/protocolppt1-090926053218-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





















![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)










