Downloaded 23 times



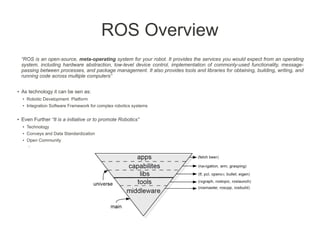


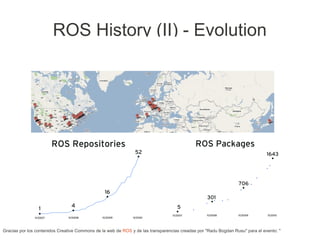
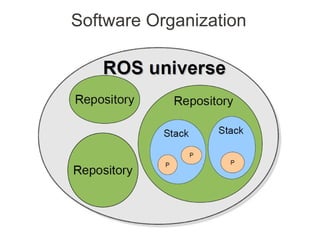

ROS is an open-source robot operating system that provides services like hardware abstraction, messaging, and package management. It aims to promote sharing of robotics knowledge and software. ROS uses a distributed architecture with nodes that communicate asynchronously via published topics. It has a large user community with over 2000 packages and is primarily used with Linux, but also supports Windows and ARM platforms. ROS emphasizes software reuse over creation to facilitate integration of complex robotics systems.


















![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)