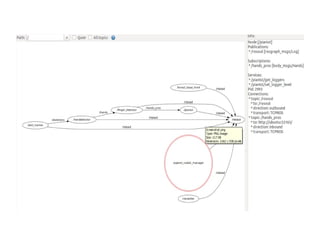
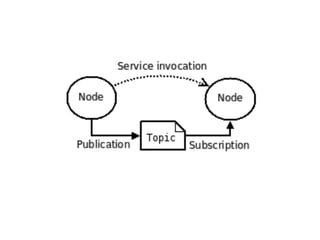



Robot Operating Systems (ROS) is an open-source, meta-operating system for robots that provides low-level device control and message passing between processes. ROS has a file system structure based on packages, manifests, and stacks to manage code organization. At the computation graph level, ROS uses nodes that communicate via topics and services, and is coordinated by a ROS Master and parameter server.

![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)













































